某采油平台振动检测及焊缝裂纹产生原因分析
2018-06-01葛扬志
葛扬志
(中海石油(中国)有限公司上海分公司,上海 200030)
海洋平台是海上石油开采的重大基础性设施,长期服役在风浪载荷、环境腐蚀、海洋生物附着等多种因素的交互作用下[1]。随着平台服役时间的延长,平台主结构的应力集中部位或低疲劳寿命部位将会出现裂纹损伤,影响平台结构的稳定。因此,对海洋平台进行结构安全性检测评估显得尤为重要[2-4]。
振动检测方法是一种无损检测方法,主要利用实测结构动力响应振动数据,通过系统参数识别方法判断平台结构的参数变化,得到结构损伤的诊断结论,进而实现平台结构安全评估的目标[5]。由于振动检测实施过程不会影响平台其他生产设备的正常工作,且可实现长时间、在线的主结构损伤情况监测需求,因此振动检测方法在海洋平台安全评估研究中获得了广泛应用[6-8]。
基于上述分析,本文以某采油平台的振动检测分析为例,分析某采油平台的实测振动检测数据,从时域和频域的角度探索平台上甲板主梁及将军柱焊缝裂纹出现的原因,提出了消除平台焊缝裂纹的方法。
1 振动测试的方案
1.1 主要测试仪器和检测原理
振动信号采集设备包括磁电式振动速度传感器、动态信号采集分析系统、振动分析软件等[9]。其中,动态信号采集器采用32通道,型号为TST5910,连续采样频率为1 000Hz;磁电式振动速度传感器的型号为DH610H/V。
该采油平台的检测原理:先综合分析平台的整个结构,再选择平台上合适的位点进行传感器的布置,从而进行振动数据的采集,然后通过分析软件进行分析,最后根据分析结果对平台作出评估结论并提出相应建议。此检测原理的流程如图1所示。

图1 某采油平台振动检测原理
1.2 测点布置
某采油平台是一个四桩腿导管架井口平台,主要由4根桩腿和3层甲板组成的上部模块及1台将军柱吊机组成,其结构简图如图2所示[9]。
分别在平台的吊机将军柱、4根桩腿及上甲板主梁上布置振动测点。其中,将军柱共布置5个测点,如图3所示;4根桩腿共布置8个测点,如图4所示;上甲板主梁共布置2个测点,如图5所示。
1.3 激振方式
1)自然环境激励下吊机及平台同步振动测试。在自然工况下分别对吊机将军柱、4根桩腿及上甲板主梁进行同步振动测试。
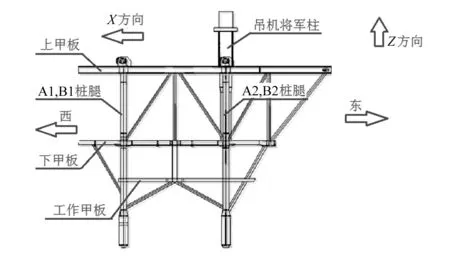
图2 某采油平台结构简图
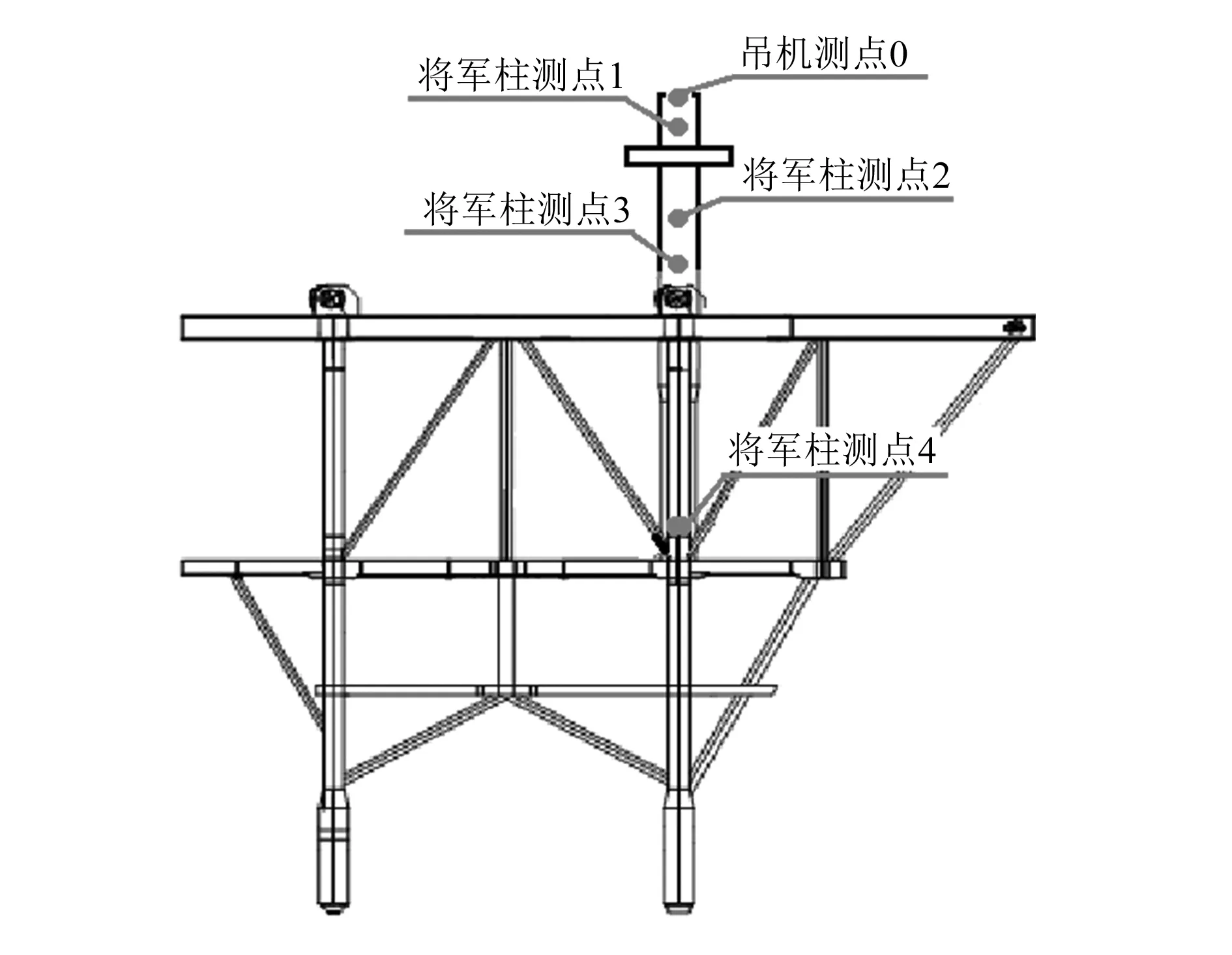
图3 将军柱振动测点分布情况
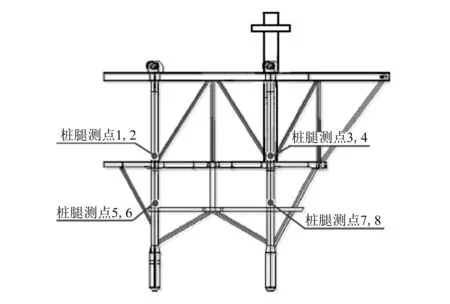
图4 平台4根桩腿振动测点分布情况
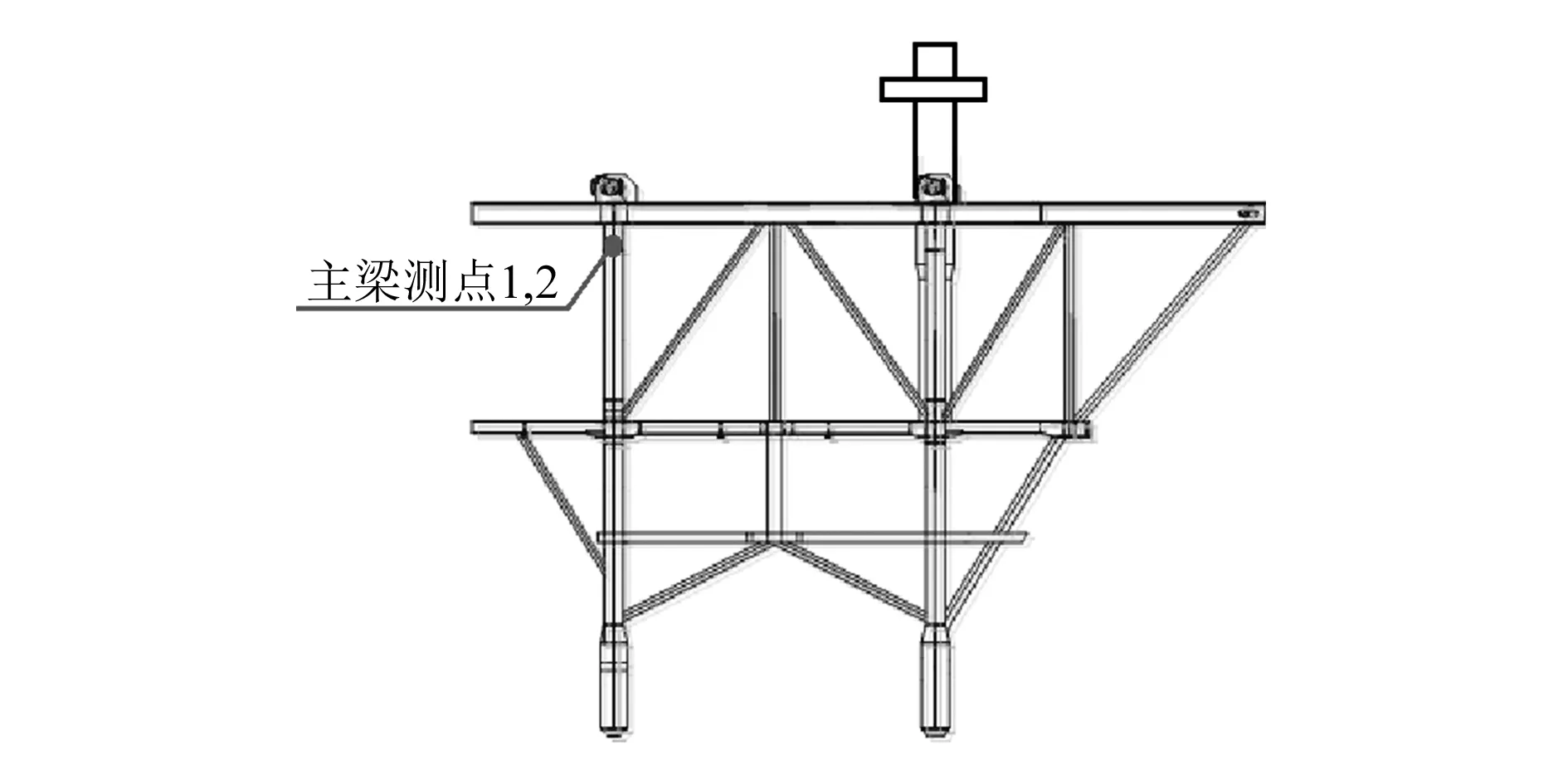
图5 平台主梁振动测点分布情况
2)吊机工作环境激励下吊机及平台同步振动测试。在吊臂抬起、吊臂回转、吊机加载和吊机卸载这4种典型工况下分别对吊机将军柱、4根桩腿及上甲板主梁进行同步振动测试。
2 自然工况及吊机工作工况下振动信号分析
为了探索上甲板主梁及将军柱焊缝裂纹反复出现的原因,本节分别从时域分析和频域分析的角度,对自然工况和吊机工作工况下的振动信号进行分析[9]。
对于上甲板主梁的焊缝裂纹,重点分析下甲板4根桩腿和上甲板主梁的6个测点的振动数据;对于将军柱的焊缝裂纹,重点分析吊机将军柱的振动数据。
2.1 时域分析
在自然工况下,对下甲板4根桩腿及上甲板主梁的6个测点采集到的振动数据进行去均值处理,计算6个测点的振动速度响应的均方根值,见表1。
表1 桩腿及主梁6个测点的振动速度响应均方根值
由表1可知,下甲板4根桩腿及上甲板主梁的6个测点在X方向和Y方向的最大速度响应均方根值分别为0.93mm/s和1.12mm/s,远小于《ISO 6954:2000》标准中的A级严重振动下限值4mm/s,且平台Y方向振动幅值均高于X方向振动幅值。
在自然工况下,对吊机将军柱上的5个测点采集到的振动数据进行去均值处理,计算这5个测点的振动速度响应均方根值,见表2。
表2 吊机将军柱5个测点的振动速度响应均方根值
由表2可知,吊机将军柱5个测点在X方向和Y方向的最大速度响应均方根值分别为1.08mm/s和1.50mm/s,远小于《ISO 6954:2000》标准中的A级严重振动下限值4mm/s。
2.2 频域分析
在自然工况下,对下甲板4根桩腿及上甲板主梁的6个测点的振动信号进行频域分析,得到其X方向和Y方向的功率谱图,如图6所示。经分析可以发现:
1)X方向振动情况在频域方面具有较好的一致性,各测点X方向固有频率值均为0.58Hz;
2)Y方向振动情况在频域方面出现不一致性情况,B1、A1两根桩腿和主梁的固有频率分别为0.54Hz和0.78Hz;而B2、A2两根桩腿的固有频率为0.54Hz。
由于在吊臂抬起、吊臂回转、吊机加载和吊机卸载这4种典型工况中,吊机加载工况的振动幅值变化最大,所以本节重点选取吊机加载工况下测点的振动数据进行分析。
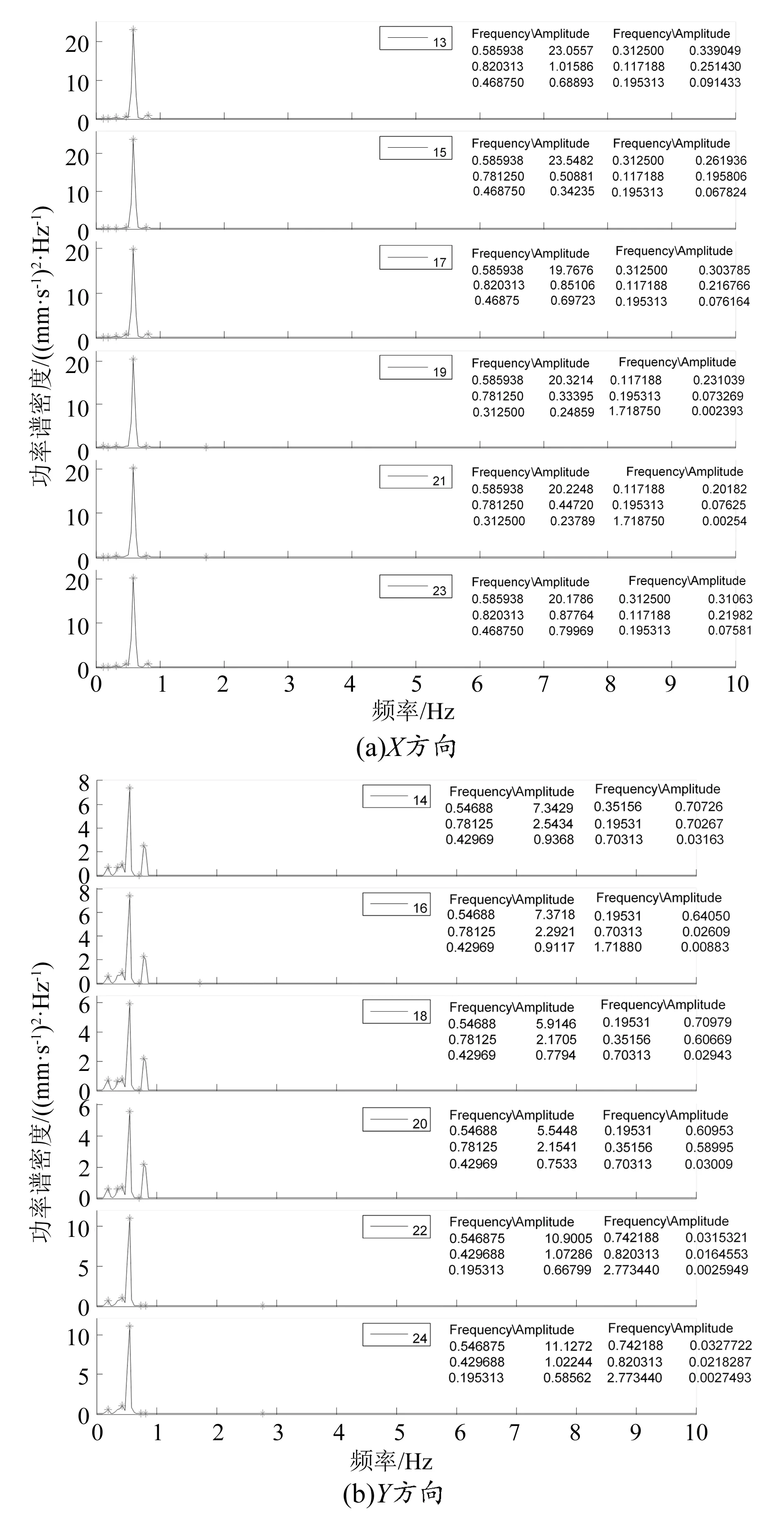
图6 下甲板桩腿及主梁6个测点的振动功率谱图
在吊机加载工况下,对吊机及平台的8个主要测点的振动信号进行频域分析,得到其X方向和Y方向的功率谱图如图7所示。经分析可以发现:
1)X方向吊机及平台均被激励起0.58Hz和0.78Hz的频率成分;
2)Y方向吊机及平台整体均被激励出0.54Hz的频率成分,而在主梁的两个测点上,0.78Hz的高频成分对应的能量较大。
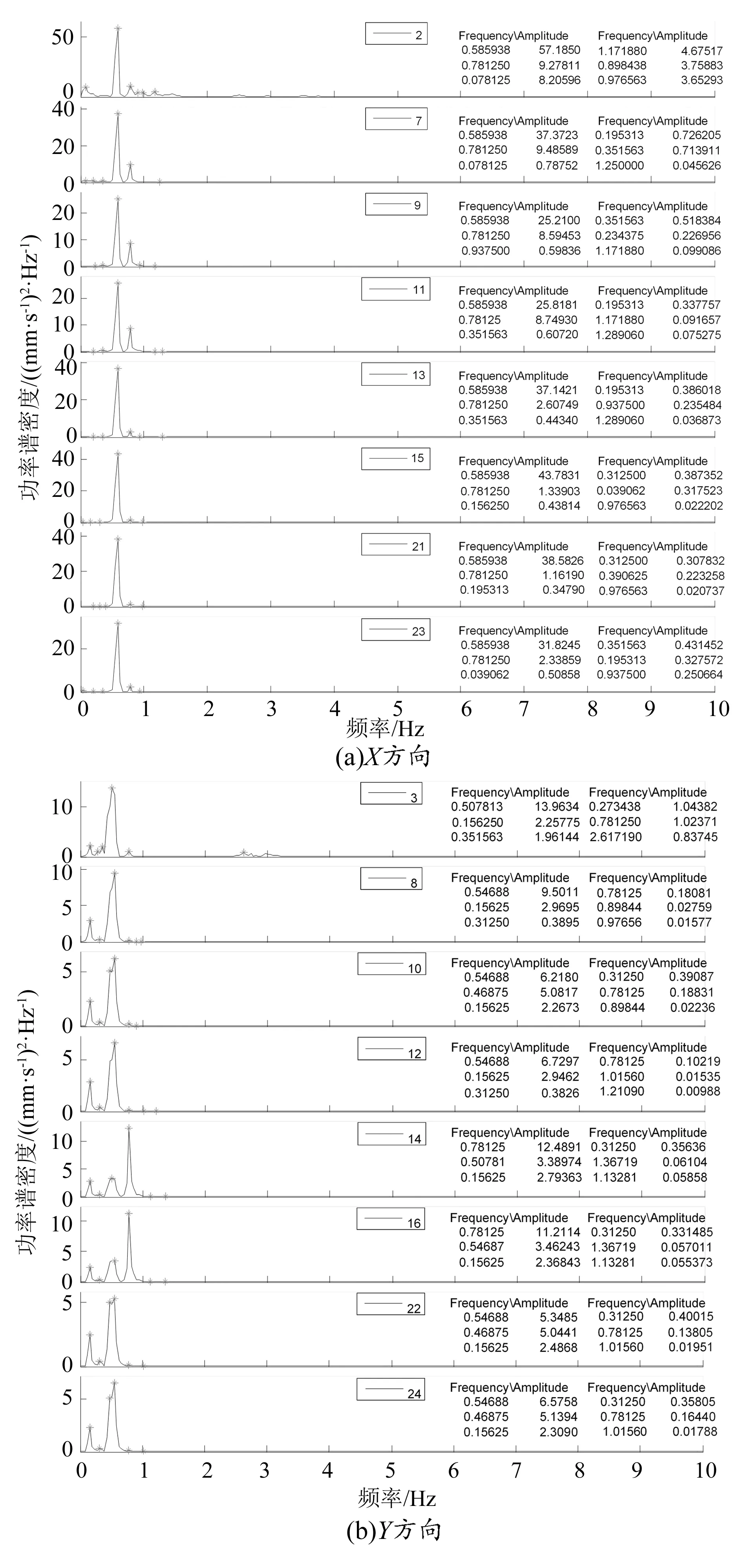
图7 吊机加载工况部分测点的振动功率谱图
3 焊缝裂纹产生原因分析
通过对平台现场情况的了解,某采油平台的焊缝裂纹主要集中于3处:吊机将军柱上甲板以上第二道焊缝处,下甲板吊机将军柱根部焊缝处,以及A1、B1桩腿与上甲板主梁连接焊缝处。
为了对吊机将军柱在上甲板以上部位的焊缝裂纹进一步细化定位和找出裂纹反复的原因,在后续的测试中对此部分将军柱增加了2个测点,所以除吊机测点0之外将军柱上现共有6个测点。因限于篇幅,第2节的时域分析和频域分析仅重点分析了部分测试数据,而在分析了所有测试数据后,发现该平台主要存在以下3个方面的问题:1)平台Y方向存在振动偏大现象;2)0.78Hz固有振动频率长期存在,对将军柱和A1、B1桩腿振动影响较大;3)吊机工作状况下会产生0.93Hz、1.13Hz的高阶振动频率。
3.1 平台Y方向的振动幅值高于X方向的振动幅值
选取将军柱振动幅值明显加剧的吊臂抬起、吊机加载、吊机卸载3种吊机工作状况下的振动数据,计算出4根桩腿的8个测点的振动速度响应最大值,并将其与自然工况下振动速度的最大幅值进行对比,绘制柱状图如图8所示。由图8可以看出,在这4种工况下平台振动均存在着Y方向振动速度幅值高于X方向振动速度幅值的现象。
从这种现象可以推测出,平台在Y方向振动使平台主结构连接处受到的交变应力大于平台在X方向振动带来的交变应力,因此平台在Y方向的振动更容易导致其主结构的疲劳,使焊缝出现裂纹。
近两年通过对该采油平台焊缝超声检测发现,在将军柱主要焊缝和A1、B1桩腿与上甲板主梁连接焊缝的Y方向上发现了较多裂纹,这一结果与平台Y方向振动速度高于X方向振动速度有关[9]。
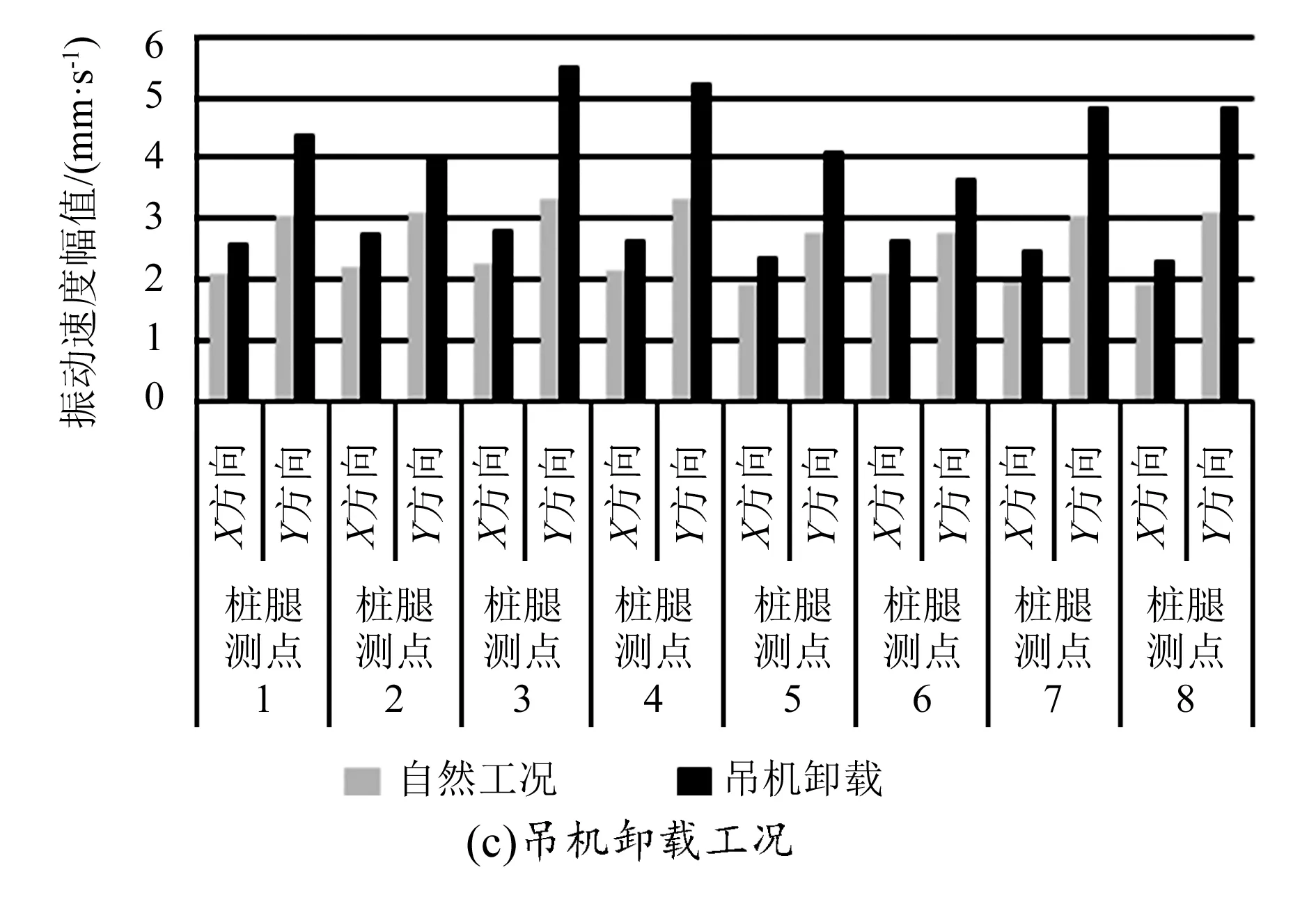
图8 自然工况和吊机各工况下4根桩腿振动最大幅值
平台出现Y方向振动幅值高于X方向振动幅值的现象,其主要原因在于[9]:1)平台Y方向的刚度小于X方向的刚度;2)平台Y方向承受的风载较X方向大。
3.2 0.78Hz频率对吊机及主梁焊缝的影响分析
选取吊机静止、吊机放置、吊机变速旋转到平台X方向和吊机变速旋转到平台Y方向这4种不同工况下平台的振动数据,将各测点0.78Hz频率的功率谱幅值进行对比,绘制柱状图如图9~12所示。
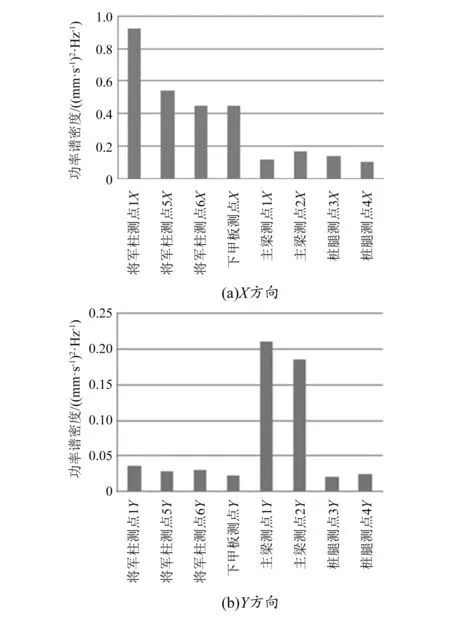
图9 吊机静止状态下0.78Hz的功率谱幅值
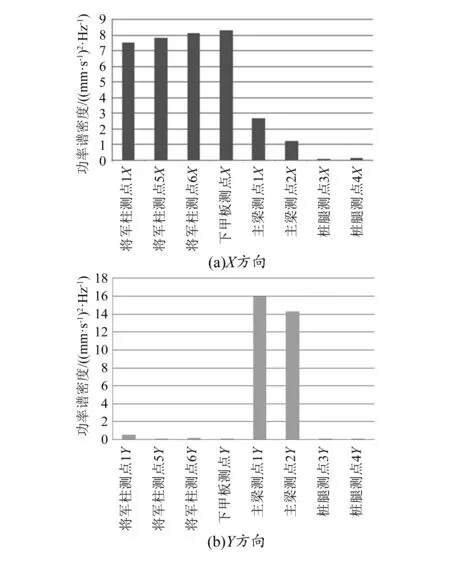
图10 吊机放置工况下0.78Hz功率谱幅值
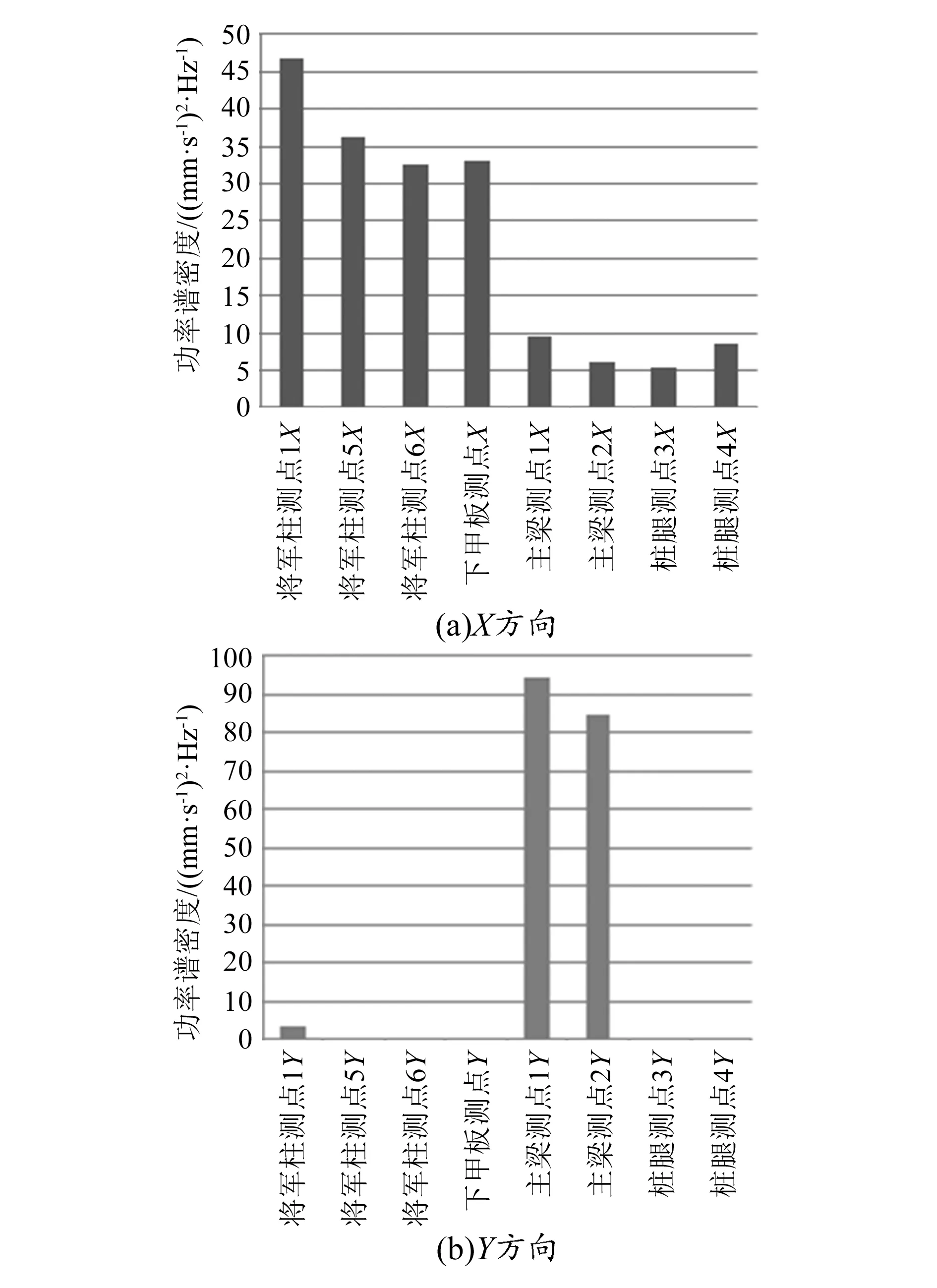
图11 吊机变速旋转到平台X方向时0.78Hz功率谱幅值
从图中可以看出,该海洋平台存在0.78Hz这一固有振动频率,并且在吊机将军柱上该频率振动能量主要集中于X方向,在A1、B1桩腿与上甲板主梁连接处该频率主要振动能量集中于Y方向。

图12 吊机变速旋转到平台Y方向时0.78Hz功率谱幅值
通过对上述4种工况下吊机将军柱和平台主梁的振动情况进行综合分析,可以得出该吊机在平台X方向进行变速旋转时,0.78Hz频率成分的振幅会对平台主梁结构造成较大冲击,尤其是吊机在X方向变速旋转时,主梁测点Y方向的振动能量会有非常大的增加。因此在这种瞬态冲击作用下,吊机将军柱和A1、B1桩腿之间的主梁会产生过大应力及形变,并导致平台结构发生焊缝开裂等现象。同时,多次重复性的冲击载荷也易使平台结构发生动态疲劳,造成A1、B1桩腿之间主梁焊缝的疲劳破坏。
对比吊机静止及各种工况下的吊机将军柱根部测点6与同侧A2、B2两根桩腿测点3和4在X方向上的0.78Hz振动能量可知:吊机将军柱根部X方向0.78Hz频率的振动能量在所有状况下都偏大。因此,将军柱根部会长期承受更多的冲击能量,容易在将军柱根部出现焊缝裂纹[9-10]。
3.3 高频成分对吊机将军柱焊缝裂纹的影响
在吊机工作工况下,将军柱往往被激励出0.93Hz和1.13Hz的振动频率,为分析其对吊机将军柱焊缝的影响,实际中在5种不同工况下对吊机将军柱与平台各测点进行了振动幅值分析和这两种频率的振动能量变化分析,即吊臂抬起工况、吊机加载工况、吊臂空载低速回转工况、吊臂空载变速回转工况(X方向存在冲击)和吊臂空载变速回转工况(Y方向存在冲击)。各工况下的分析过程相似,故重点以吊臂抬起工况为例进行论述。
在吊臂抬起工况下,吊机将军柱与平台各测点在X方向的振动幅值曲线如图13(a)所示,将军柱测点1的振幅达到19.18mm/s,并且将军柱测点5较测点1的振幅大幅下降(下降14.4mm/s),将军柱测点6则较测点5的振幅有小幅下降(下降0.91mm/s),其余平台各测点的振幅差别不大,大约在3mm/s左右波动。
在Y方向的振动幅值曲线如图13(b)所示。从图中可以看出,吊机将军柱上各测点的振幅总体上呈现出从上至下依次递减的趋势,将军柱测点2,3,4的振幅近似相等。
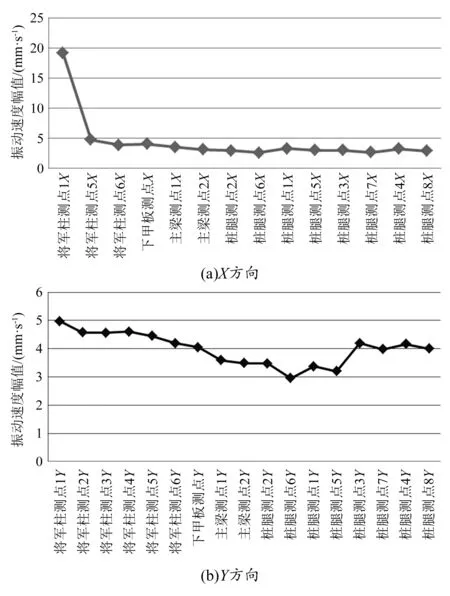
图13 吊臂抬起时各测点振动幅值变化曲线
对吊机吊臂抬起过程中吊机将军柱及平台振动信号进行功率谱分析,并将各测点0.93Hz频率的振动能量作曲线对比。
吊机X方向0.93Hz频率的振动能量曲线如图14(a)所示,从图中可以看出,在吊机吊臂抬起过程中,除将军柱测点1能量较高(对应的功率谱密度幅值为19.23(mm/s)2/Hz)外,其余测点的振动能量都接近于0,且能看出将军柱测点6的振动能量和下甲板测点的振动能量都大于测点5。
吊机吊臂抬起过程中Y方向0.93Hz频率的振动能量曲线如图14(b)所示。其中A1、B1桩腿测点及主梁测点的能量较大,其余各测点的能量很小(对应的功率谱密度幅值小于0.1(mm/s)2/Hz)。
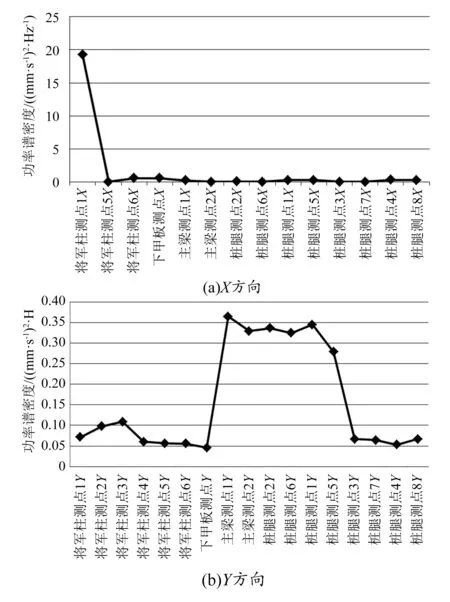
图14 吊臂抬起时各测点在0.93Hz处振动能量变化曲线
通过先前频域分析阶段对吊臂抬起工况的功率谱分析得知,在所有测点X,Y方向的功率谱图中,1.13Hz都不是极值点,因此在吊臂抬起工况下平台的主要振动频率中不包含该频率成分。
在分析吊臂抬起工况后,实际测试中按照同样的方法,分析了另外4种工况下的振动幅值和振动能量的变化曲线,分析过程相似,不再一一赘述。通过对吊机各种工况下0.93Hz及1.13Hz频率的综合分析,得出以下结论:
1)当吊机非平稳工作时,将军柱测点1的振幅大幅增加,除平台固有频率成分0.58Hz和0.78Hz以外,吊机将军柱新增了主要振动频率0.93Hz与1.13Hz,并且这些频率的能量在将军柱测点1至测点2大幅衰减,而将军柱测点2,3,4的能量变化不大,甚至保持一致,在测点4与测点5之间能量又有所下降。因此,可以推测将军柱测点2以上部位的焊缝以及测点5以上部位的焊缝受到了0.93Hz与1.13Hz振动能量的影响,因而容易造成焊缝疲劳裂纹。
2)通过振动测试获得的所有振幅变化曲线和0.93Hz与1.13Hz的振动能量变化曲线中可以得知,将军柱测点6与下甲板测点的振幅与能量通常大于测点5,这与将军柱上其余测点自上而下振幅与能量减小的趋势相反。虽然0.93Hz与1.13Hz的能量在此处已经衰减得较弱,但由于高频振动对焊缝的疲劳影响较大,因此这也是造成将军柱根部与下甲板焊缝出现裂缝的原因之一。
4 结论与建议
本文通过对吊机将军柱、平台4根桩腿及上甲板主梁等18个关键部位测得的振动数据进行分析,得出如下结论:
1)平台X方向振动固有频率为0.58Hz,Y方向振动固有频率为0.54Hz。
2)此海洋平台整体振动Y方向的振动幅值高于X方向的振动幅值,因此平台在Y方向更容易出现焊缝开裂等现象。
3)平台在将军柱X方向及A1、B1桩腿与上甲板主梁连接焊缝的Y方向存在0.78Hz高频局部振动,会导致以上3处更容易出现焊缝裂纹。这一结果与现场超声波探伤检测焊缝裂纹结果一致。
针对以上结论,建议平台运行过程中采取以下措施:
1)平台上动设备工作频率需远离平台振动固有频率0.58Hz及0.54Hz,避免引起平台的共振现象。
2)针对0.78Hz频率导致将军柱和主梁产生焊缝裂纹的原因进行查找,建议采用模态分析法对平台整体振动做进一步分析,提出消除高阶固有振动措施。
3)建议对将军柱整体进行模态分析,针对将军柱不同工作状态下产生的振型进行研究,结合0.93Hz和1.13Hz等高阶频率出现的特点,制定加强吊机将军柱上甲板以上部位刚度的具体实施方案,以达到减小将军柱振动的目的。
参考文献:
[1] 欧进萍, 段忠东,肖仪清.海洋平台结构安全评定——理论、方法与应用[M].北京:科学出版社,2003.
[2] 岳前进,王胜永,樊哲良,等.番禺30-1导管架海洋平台结构振动监测与安全分析[J].海洋工程,2013,31(2):41-44.
[3] FAN W, QIAO P. Vibration-based damage identification methods: a review and comparative study[J]. Structural Health Monitoring, 2011, 10(1): 83-111.
[4] 李洪涛,刘跃,徐长航,等.基于振动与声发射信息融合的海洋平台损伤定位方法实验[J].天然气工业,2013,33(4):120-124.
[5] 潘东民,陶杰,徐龙达,等.基于振动检测的海洋平台固有特性评估方法[J].机械工程师,2013(7):130-132.
[6] 李洪涛,史玉峰,翟建习,等.海洋平台振动监测技术试验研究[J].中国安全科学学报,2012,22(12):46-50.
[7] 罗超,王巍巍,杨江辉,等.海上平台在动设备影响下的振动分析研究[J].海洋石油,2012,32(4):101-107.
[8] 谢卓,张火明,方贵盛,等.导管架平台的振动响应统计分析[J].中国计量学院学报,2015,26(4):423-427.
[9] 徐菖松,蒋超,石坤举,等.4桩腿平台振动测试及焊缝裂纹产生原因分析[J].机械制造,2015,53(11):52-55.
[10] 张润忤,刘树林,吕骁翼,等.基于固有频率的导管架型海洋平台状态测试方法[J].计量与测试技术,2016,43(5):31-33.
