“互联网+”背景下的机器人智慧实训室设计*
2018-06-01任洪锋叶方便郦丽华孔德彭赵丽丽
任洪锋 ,叶方便 ,郦丽华 ,孔德彭 ,赵丽丽
(1.浙江电子工程学校,浙江 绍兴 312030;
2.浙江工业大学 机器人教育研究中心,浙江 杭州310023)
一、机器人实训室建设背景
1.机器人产业政策及现状
我国政府部门高度重视机器人产业的发展,[1]国务院、工信部、科技部等多部门陆续出台了包括《关于推进工业机器人产业发展的指导意见》等多项政策文件,推动我国机器人产业的发展。2015年发布的 《中国制造2025》提出实现制造强国的战略目标,[2]一方面要推进信息化与工业化深度融合,加快发展智能制造装备和产品;[3]另一方面要推进制造过程的智能化,加快人机智能交互、工业机器人、智能物流管理、增材制造等技术和装备在生产过程中的应用。[4]工信部、发改委和财政部联合印发的《机器人产业发展规划(2016-2020年)》也提出“十三五”期间是我国机器人产业发展的关键时期,应把握国际机器人产业发展趋势,整合资源,制定对策,抓住机遇,营造良好发展环境,促进我国机器人产业实现持续健康快速发展。
可以预见,企业对机器人技术的人才需求将大幅增长,特别是应用型机器人专业人才的缺口将会增大。尽管机器人技术越来越受到教师、学生与家长的广泛重视,机器人教育逐渐进入到课堂、竞赛中,但在教学手段、教学资源、教学模式等方面也存在着一些急需解决的问题。比如教师如何设计、组织、开展机器人教学活动以及对教学活动及时进行合理评价;如何提高学生学习的兴趣,激发他们学习的动力;如何提高实训设备的利用效率,使信息数据实现自动化采集等;如何在“互联网+”背景下建设工业机器人智慧实训室越来越得到重视。
2.机器人教育及人才培养
上世纪90年代初,机器人教育开始被大众知晓,与此同时国内也开始举办各种机器人的竞赛,而后国家层面也开始关注专业化的机器人教育。在2003年明确将“简易机器人制作”列入中小学的选修课程,这为日后的机器人教育研究发展做好了准备。2007年以来人们对机器人教育重要性的认识有了明显提升,在机器人教学过程中采取的教学模式有了一定的研究,也提出了各种实际的应用案例。机器人教育迎来快速发展阶段。随着新一代人工智能发展对人才需求的增加,国家将机器人教育明确列入中小学的信息技术课程选修拓展模块中,2016年发布的《2016全球教育机器人发展白皮书》为今后一定时间内的机器人教育实践提供了有效指导和可行性分析。国发[2017]35号《国务院关于印发新一代人工智能发展规划的通知》提出,以机器人为代表的人工智能技术得到突破,为了快速推进智能机器人的应用,构筑基于机器人的知识、技术、产业群、人才、文化及制度相互支撑融合的生态系统是未来的发展方向。
二、机器人实训室建设架构
本篇讨论的工业机器人智慧实训室包括机器人的实训系统和智慧系统。其中机器人的实训系统基于工业机器人、教育机器人入门体验,服务机器人互动演示,工业机器人基本操作、编程调试和智能工作站一体化构建等三层实训室,12个实训分室;智慧系统设计基于“互联网+”、物联网和数据采集及挖掘等信息化手段,以提高教学效果与实训室管理能力。
1.机器人实训系统
机器人实训系统的设计原则应体现以人为本、实践创新的理念,即综合考虑实训室的教育机器人、服务机器人和工业机器人的全面教学及由浅入深、有点及面的教学、培训与研究要求,同时为教师、学生提供一个开放性、可扩展的工业机器人实训平台。
在硬件设计上,尽量与企业的实际应用环境实现无缝对接,基于企业岗位需求配置设备和开发教学任务。[5]
图1为实训室的整体布局掠影。一个实训室共有20台课桌、5个机器人工作站,每台工作站配备有一台计算机,其中机器人工作站1至机器人工作站4为学生实训的工作站,机器人工作站5为教师演示与教学的工作站,资料柜和工具存放区将所有机器人资料与所需工具统一摆放,便于实训室管理。学生以5人一组分工合作进行实训,共同完成一个机器人工作站的作业。

图1 实训室整体布局案例图
在教学中,教师可通过理实一体化教学,将学生获取理论知识与提高实操技能结合在一起;通过小组讨论合作,充分培养学生创新、协作、动手等能力。学生能够利用实训平台进行创新实践活动与竞赛,模拟机器人的实际工作流程与作业。
2.智慧元素的镶嵌
实训室基础设备配置是满足教学的根本要求,将现代化智慧手段和信息化元素与设备进行嵌套与融合,构建智慧化机器人实训室,不仅仅是锦上添花的事情,更是优化教学设计、提升教学策略、提高教学质量的有效补充。为此,借助于ZigBee、TCP/IP、蓝牙、RFID射频识别[6]等技术实现节点上信息采集,然后实时将信息送至网络中,借助信息化软件功能分析探究逻辑关系,完成数据梳理、清洗和优化与重构;当然也可以与“互联网+”结合,将采集的信息传输至阿里云、彗星云、职教云等平台上,在经云端传输到终端,使用户在终端就可以对实训室进行查看和控制,教师与学生利用智慧实训室进行教学信息查询、筛选、资源共享、科研创新、竞赛竞技等一系列教与学的互动。[7]图2为基于ZigBee智慧实训室系统框架图。[8]

图2 基于ZigBee智慧实训室系统框架
(1)智慧实训室的优点
一是数据信息自动采集。数据信息的采集实现自动化体现了物联网技术的应用,也是相比传统实训室技术进步的关键所在。物联网信息采集设备具有自组网、自修复、自诊断、高稳定性等特点,可以在实训室管理中实现信息采集的自动化,从而减轻管理者的工作负担,提高数据的真实性、及时性。二是实时控制远程化。随着5G时代的到来,物联网技术通过各种技术将网络延伸至各个控制终端。如校园后勤系统的电表、水表,实训室中电源的控制,教室的电灯管理等,利用物联网技术,控制设备或移动终端可以通过网络实现远程控制,使实训室管理不受地域和时间限制。与此同时,通过视频数据的采集与分享可以实现远程的可视化管理。三是系统运行自动化。系统运行的服务器是整个系统的中枢,通过数据库、服务器软件以及部分应用型管理软件可以实现自动化管理。依靠云计算的强大处理能力,对信息进行分析处理;既为决策者提供数据支持,又可以实现自动化控制,实现系统运行的自动化。
(2)智慧实训室的组成
机器人智慧实训室由智能管理系统、多媒体信息分布式交互系统、桌面教育云系统、机器人虚拟仿真系统组成。其硬件由电源控制类、设备管理类、环境采集类与电器控制类组成,通过移动终端、智慧云终端、PC远程控制使系统使用更加方便、人性化。图3为机器人智慧实训室的系统组成。
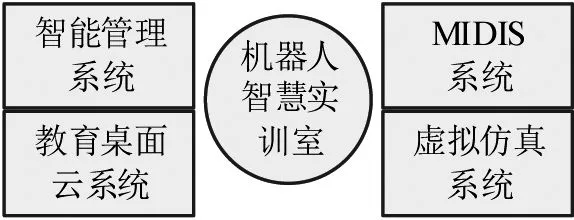
图3 机器人智慧实训室组成模块
三、实训室智能管理系统
传统实训室维护起来较为复杂,管理分散,在安全性上也有很多漏洞,同时实训机房硬件重复投入,升级成本大。而实训室智能管理系统是在“互联网+”基础上的实训室管理平台,通过IC卡门禁、视频监控、电源控制、中央服务器、移动终端等硬件设备对实训室进行管理。综合利用现有机房设备使总成本下降,做到安全控制、集中管理、运维简化。实训室智能管理系统以智慧实训室管理云终端为核心,对实训室进行精细化管理。
1.IC卡门禁
将IC卡门禁系统应用于实训室管理中,可以通过后台服务器统计实训室的使用情况,并将数据实时反馈到教师机或移动终端,方便实训室的预约和教师统计学生出勤状况。这样,实训室的预约系统已不是简单网上预约排队,而是把学生前期的培训考核,作为获取实训设备的操作资格。我们知道IC卡 (Integrated Circuit Card)是将微电子芯片嵌入卡基、以卡片的形式完成通讯传输的信息载体,其与读写器之间的通讯传输方式可以是接触式的,也可以是非接触式的。非接触式IC卡又叫做射频卡,是利用射频识别技术(RFID)完成通讯。与接触式相比,非接触式IC卡解决了卡内无源与免接触的难题,安全性大大提高。[9]常用于安全认证、数据存储等方面。
2.基于Hadoop 的监控系统
现在的实验室视频监控子系统[10]多是基于流媒体服务器,通过摄像头采集监控数据,经协议传输到服务器,再根据用户要求进行处理。但这样随着访问人数与用户量的增加,流媒体服务器会出现负载过重、容灾能力弱、扩展能力弱等缺点。无法满足监控平台对多个视频进行同时观看的需求。Hadoop是一种分布式系统基础架构,通过Hadoop可以实现分布式文件系统(HDFS),它具有高容错率的特点,同时提供高吞吐量以访问应用程序的数据,为海量数据提供存储。引入Hadoop可以有效解决视频监控系统中负载过重、容灾能力弱、扩展能力弱等缺陷。将视频数据通过服务器放到云端,可以在移动终端随时随地对视频进行调看。
3.机器人设备信息采集智慧控制
机器人设备信息采集通过RS-485端口连接到服务器,再通过服务器将信息传输到云端服务器、移动终端和计算机等设备中。用户可以通过移动终端和计算机等设备,随时随地查看机器人设备的相关信息,通过这些信息对机器人进行相关控制;也可以通过云端服务器对机器人设备进行自动控制,实现机器人设备控制的智能化、智慧化。比如根据采集的信息,自动运行机器人的保养维护、急停等功能;在教学过程中,教师可以根据采集的信号,分析学生在使用机器人时的掌握情况,以便更好服务于教学。图4为机器人设备信息采集的智慧化控制。
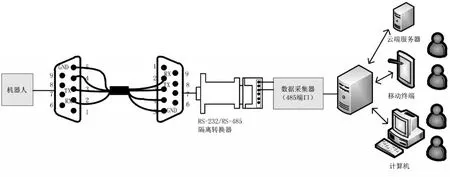
图4 机器人设备信息采集的智慧控制图
四、多媒体信息分布式交互系统
1.AV系统发展方向
多媒体信息分布式交互系统(MIDIS)的主要任务是完成AV系统的五大任务,即控制、传输、处理、存储与管理。[11]在设计层面,MIDIS将各个系统整合到单个系统中;在应用层面上,MIDIS基于B/S网络架构平台,将从前的分散管理、专用平台控制转换为定制管理、多平台控制;[12]同时将原先系统中有限变为无限、分网异步传输变为同网同步传输。
2.MIDIS系统对比优势
传统系统由中控系统、录播系统、视频系统、音频系统、多媒体信号放大传输系统组成,其音频系统与视频系统采用分网传输,无法做到同频传输;传统系统所涉及的接口、协议、信号格式繁多,很难做到系统的高度集成,这就意味着整体升级困难;而且传统系统的故障率较高,在备份时需要系统独立备份;随着设备的增加,成本也随之增加;此外在交互性上,由于采用多系统专用平台控制,交互性不佳。
MIDIS在系统兼容性、传输性、稳定性、经济性等方面比传统系统均有较大提升。MIDIS的系统只需要建立一套网络,其所有信号控制、显示及传输均在同一平台下,很容易进行系统集成。同时分布式系统结构可对全系统进行实时备份,大大提高其稳定性。由于只有一套系统来实现多平台控制,全交互式用户控制体验性能增强。在经济性上,分布式系统的成本也更低,具有较高性价比。
3.MIDIS系统组成
MIDIS系统采用模块化设计结构,由主服务平台、环境控制接口机、网络媒体服务应用平台、交互控制终端、网络交换机等组成。每个模块的功能节点按照主服务平台分配的指令完成处理任务。图5为MIDIS系统的组成结构图。
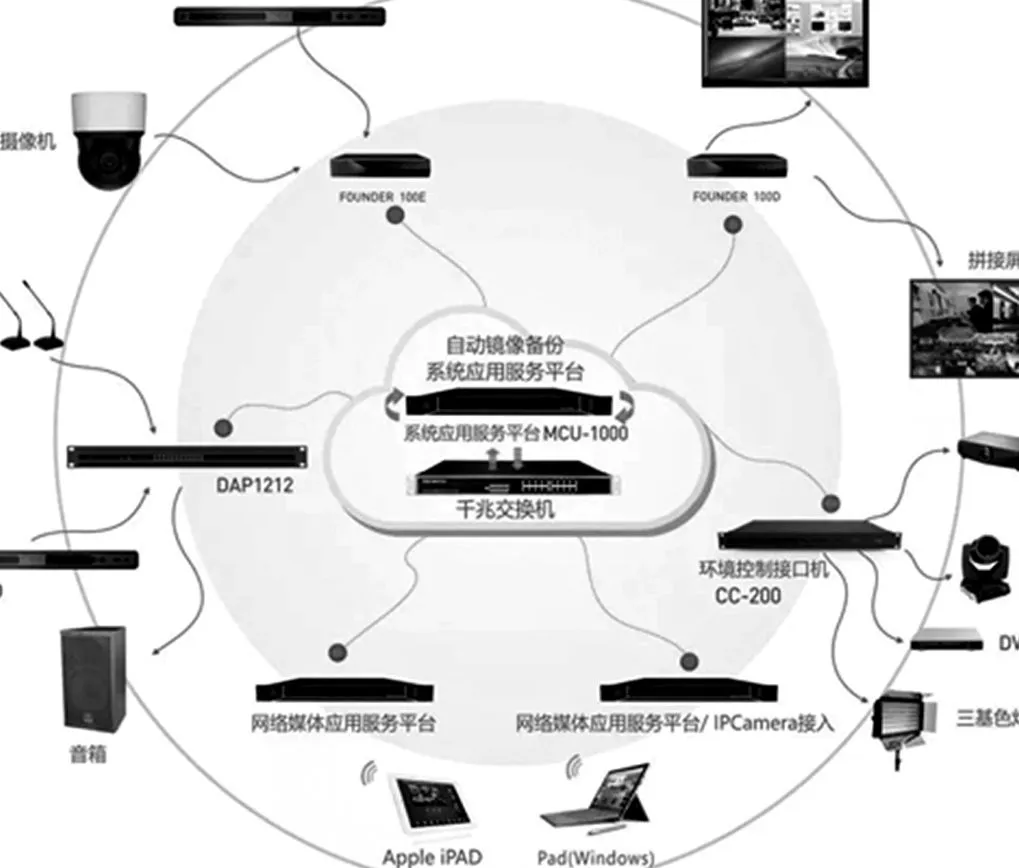
图5 MIDIS系统的组成结构
一是主服务平台。又叫做系统应用服务平台。同时也可作为备份服务平台,是系统的核心模块,可以为MIDIS系统提供必要的协议服务,协调并监视各类接口机工作,保证系统高效运行。二是环境控制接口机。环境控制接口机为区域范围内终端设备提供接口,如DVD、空调、显示器、摄像机等,支持 RELAY、RS232、RS485、I/O、ETHERNET等多种控制模式。三是网络媒体应用服务平台。网络媒体应用服务平台(Media Server)可以对远端任意节点进行节目的录制,每台设备可以对32路高清或64路标清进行同时录制。为用户提供分布式存储服务和节目点播服务。由于摄像机信号的接入,所以Media Server不再需要硬件输入接口机。
4.MIDIS系统应用
将多媒体信息分布式交互系统应用于机器人实训室中,可以极大提高教学效率。通过将上课时的音频、视频数据上传到云端,学生就能实现远程学习。由传统的一所学校、一位教师、一间教室的教学模式,转变为将互联网等信息化技术和教育领域相结合的 “互联网+教育”[13]模式;在MIDIS系统的控制界面上,显示以每秒15帧的输入输出画面,做到视频信息实时回显。再通过这些视频数据与“互联网+”结合,将不同学校、不同实训室的教学画面实时连接起来,做到异地同步教学。
五、教育桌面云系统
1.桌面虚拟化解决方案
桌面云最早是为解决移动办公的问题而诞生的,其通过权限设置可以随时随地访问桌面,获取相关数据。将桌面云与教育相结合,可以实现教学管理的高效性。现阶段的桌面云模式采用虚拟桌面基础架构(VDI),由云端服务器对终端提供计算、存储能力,后端数据中心服务器存放用户的完整桌面环境,包括操作系统和应用软件,所有计算均由服务器来完成;而用户通过不同终端设备连接网络访问指定桌面环境。[14]同时管理者通过VDI平台实现终端桌面环境统一认证、集中管理以及计算资源的分配。从而实现桌面环境与教学终端的集中管理与维护。但教育桌面云,特别是应用于实训室的教育桌面云,又具有自己的特殊性需求。比如学生通常在上课前5分钟集中进入实训室,存在大量并发开机的需求;不同课程的实训需要有不同的桌面环境,这就存在多桌面及灵活切换的需求;还需要屏幕广播的需求,这也是每个实训室所必备的功能。
2.桌面云运维管理系统架构
教育桌面云模式(E-VDI)已逐渐成为教育终端管理的主流模式。针对不同专业不同课程的学生,桌面云可以配置相应管理策略,从而对教学过程进行有效监管,提高教学质量,提升IT运维效率。桌面云运维管理系统的总体架构如图6所示。
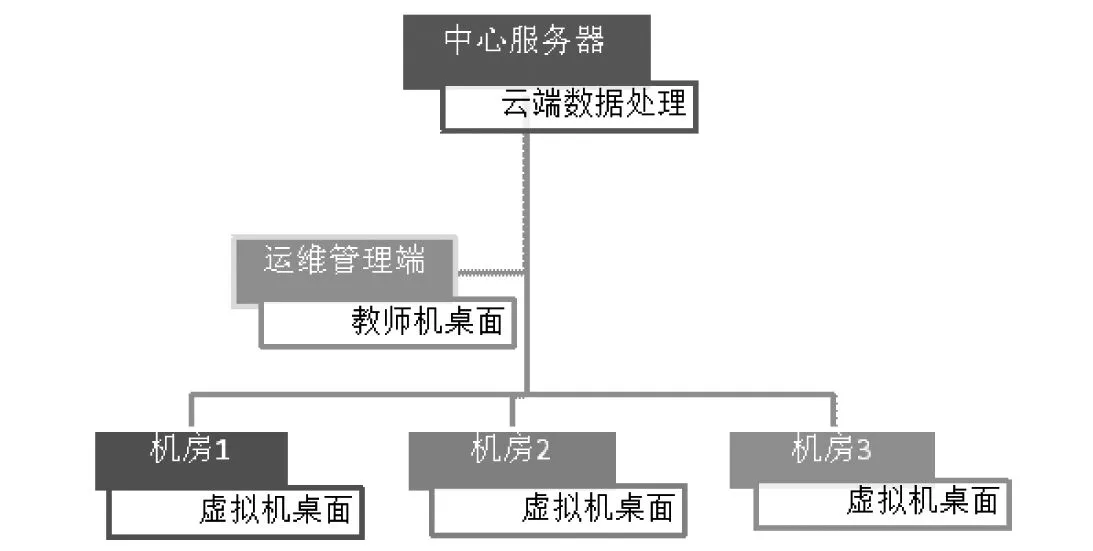
图6 桌面云运维管理系统总体架构图
其中中心服务器提供通讯服务,负责客户端与管理端的数据连接与通讯;运维管理端实现对所有虚拟机桌面的统一运行与维护管理;客户端则为被监管端,运行在虚拟桌面中。学生在客户端上进行学习,将自己的学习情况与成果通过教育桌面云反馈到教师端,教师就能及时调整教学策略,服务于教学。
六、机器人仿真及模拟系统
1.虚实一体化教学装置
通过机器人虚实一体化教学装置,我们可以建立起虚拟仿真机器人和控制主机间的虚实联动,对虚拟仿真对象进行数据建模以及3D机器人工作站的场景建模,结合教师机完成教学任务。同时通过教师机完成和后台服务器的通讯、交互以及数据管理,从而实现“教、学、考、练”四位一体教学模式的运用。
2.虚拟仿真实训软件
机器人虚拟仿真实训系统的开发目标之一就是要确保实训或实训系统具有高度仿真性,软件按照实际机器人系统进行一比一实际建模设计,场景需保证生动逼真。
在机器人仿真软件系统中,学生可以加深对机器人进行场景认知,掌握机器人离线编程软件开发环境,掌握机器人工作站系统模型构建的方法,学习Smart组件相关的离线编程技术,掌握机器人工作站简单离线轨迹编程方法。
3.虚拟现实(VR)教学平台
虚拟现实技术(VR技术)已经在军事训练、游戏娱乐、工业制造、虚拟社交、医疗、电子商务、教育等方面全面开花。VR技术在教育领域的应用,逐渐改变了传统的教学模式,它可以弥补教学条件资源的不足,也可以满足学生进行实训课的学习,降低教学成本的同时提高了教学效率。[15]
VR教材通过传统纸质教材“互联网+”的手段,实现知识点以碎片化方式接入VR空间;VR实训展示危险的作业场景,体验复杂操作流程,探索可能发生的处理过程;VR播客通过全景录播,展示全景微课堂,也可以进行工程现场全景直播,贴身体验现场场景。
在各类学校开设虚拟现实技术通识课程、建设虚拟现实技术实训室将成为普及VR技术、培养VR人才的重要途径。工业机器人专业的虚拟现实VR教学主要定位在工业机器人组装、调试和维修的技能仿真训练,为学校或企业培养工业机器人及自动化设备的维护、维修及安装调试人才提供虚拟教学(培训)环境。
七、结束语
在传统制造业加速转型升级的背景下,借助“互联网+”催生“机器人+”、“大数据+”在机器人教育中的创新应用,一方面较好地帮助学生理解、掌握机器人操作的相关知识与技能,另一方面促进了教育信息化,提升了管理效率,提高教学效率与质量,同时智慧教育新生代在机器人教育中落地生根,铸就样板工程,在区域及全国具有很好的推广价值。[16]
[1]郑伟彬.人工智能或为教育带来新可能[N].中国教育报,2017-12-07(002).
[2]钱玮珏.“智造”改变家电制造业[N].南方日报,2015-07-21(4).
[3]曲小溪.机械设备行业:国务院关于印发《中国制造2025》的通知点评[EB/OL].http://stock.stockstar.com/JC2015052100001096.shtml.
[4]国务院.国务院关于印发《中国制造2025》的通知[EB/OL].http://www.gov.cn/zhengce/content/2015-05/19/content_9784.htm.
[5]戴亦宗,陈旭.基于三菱工业机器人的实验室建设方案设计[J].实验科学与技术,2015(1):194-197.
[6]刘洋.基于RFID电子封条系统设计与实现[D].合肥:安徽大学,2012.
[7]周春月,闫子淇.基于物联网技术的智慧实验室架构研究[J].实验室研究与探索,2014(5):239-243.
[8]高永清,商丹.基于ZigBee智慧实验室系统的设计[J].电视技术,2015(8).
[9]肖连军,屈百达.基于以太网接入的射频IC卡读写器的设计与实现[J].电气传动自动化,2007(5):51-54.
[10]贾芳.基于B/S结构的远程监控系统的设计与实现[D].济南:山东大学,2007.
[11][12]王军明,付瑞雪,陈勇.基于网络化视频指挥调度系统的多媒体内容分步式一体化显控方案研究[J].中国科技信息,2013(23):129-133.
[13]石晨迪.基于“互联网+教育”提升高职院校人才培养质量的思考[J].产业与科技论坛,2017(24):271-272.
[14]赵婧.我国公共危机信息化协同管理模式的研究[D].成都:电子科技大学,2011.
[15]张津辅.论基于VR技术的摄影仿真实验室的开发与建设[J].中国轻工教育,2014(1):91-93.
[16]曲道奎.机器人时代正在走来[J].中国经济报告,2015(8):116-118.
