小脑神经网络在矿工疲劳监测控制系统中的应用
2018-05-31李红霞黄已芯田水承侯媛彬
李红霞, 黄已芯,田水承,侯媛彬
(1.西安科技大学 管理学院,陕西 西安 710054;2.西安科技大学 能源学院,陕西 西安 710054;3.西安科技大学 安全科学与工程学院,陕西 西安 710054;4.西安科技大学 电气与控制工程学院,陕西 西安 710054)
0 引 言
监测矿工疲劳水平是一种将多个随机非线性监测信号进行多元信息融合的过程,其中,多个信号的监测精度与自学习程度是准确把握矿工疲劳水平最重要的环节[1-4]。已有的矿工疲劳水平监测的相关研究成果多聚焦于对矿工疲劳水平的单一信号或多生理与心理监测信号的描述性统计分析。在理论研究领域方面,Lal SKL,Ji Q,Karthaus Melanie和Kang Jiajie等利用EGG分析技术,监测出了人体疲劳程度,为后续研究人员对驾驶疲劳程度的研究提出了新的研究思路[5-6]。田水承、李乃文、邢娟娟、成波等运用Captiv行为生理测试仪、双臂调节能力测定仪、Tobbi眼动仪等方法收集生理指标,分析了疲劳与不安全行为的影响关系,为提出智能化管控和智能化监测矿工疲劳程度提供了参考价值[7-11]。而对于实践过程中,疲劳水平监测设备多为单一信号的监测与描述性分析(诸如疲劳检测手环、检测帽等),此类设备的检测原理是用皮电和脑电信号进行简单描述性分析,最终通过统计形成的可视化界面反映人员的疲劳状况,这在一定程度上丰富了智能化管控矿工疲劳的理论体系。但实际应用过程中,由于内在关系分析能力较弱、抗干扰能力差、环境适应力不强、监测数据与实际疲劳程度偏离度较大等缺点,至今仍未得到广泛应用。
多元信息融合技术中的小脑神经网络理论是1957年由Albus模仿人类小脑的学习结构对多维连续系统的自适应学习理论[12-14]。CMAC(Cerebella Model Articulation Controller)模型引进了许多算法,其中最具有代表性的是Kotani K,Juang Jih Gau和Lin Faa Jeng等将不同算法引入CMAC小脑模型,用于机器人关节控制、遥感技术、反情报窃取系统等方面[15-17];徐德、朱家群等基于PID并行算法控制基础和模糊理论,将神经网络理论CMAC模型与模糊PID控制结合,提高了控制精度并且具有了良好的自适应能力[18]。在模式识别方面,火力安全发电关键设备故障诊断的CMAC算法被作为拓展应用范围的奠基石;侯媛彬等利用改进CMAC神经网络与设备故障诊断检验相结合,描述了CMAC算法诊断出关键设备故障的原理[20]。鉴于CMAC神经网络可实现非线性映射,某种程度上可解决单一信号监测对矿工疲劳程度监测的缺陷,但对信号内在结构还未开展深入讨论。笔者采用多元信息融合方法,基于神经网络理论,通过多传感器获取矿工疲惫状态的多元异类信号与疲劳特征,依据人因安全理论的2个维度,将矿工生理与心理行为进行多级别、多方面和多层次的监测,使得矿工出现疲劳迹象时就发出警报,当疲劳状况超出矿工的生理负荷范围时,操作机械系统强迫停止,实现自动化管控的水平。这对后续矿工疲劳监测与控制系统的开发与设计,为降低矿工疲劳生产具有非常重要的意义。
1 CMAC神经网络模型
CMAC神经网络模型实质为只能式自适应查表系统,利用多监测数据信号形成特征向量,将多指标的数据通过隐含层运算转化为小物理量的储存单元,发掘数据之间的内在结构与特征[21]。人体虽然受到不同的运动与时段影响,导致其疲劳程度复杂多变,但人体疲劳程度在时间序列上表现具有上升和周期性震荡特点,这与小脑受到外界刺激所产生的反映模式具有相似之处。因此可发掘疲劳程度与多信号之间的关联。
图1所示为标准状态下CMAC模型的网络结构[21]。该模型由网络输入、概念映射、物理映射和网络输出4个部分组成,输入状态空间X为多维空间,对每一个输出只有小部分的神经元(由输入决定)与之相关,他的联想具有局部泛化能力,即相似的输入将产生相似的神经元构成线性或非线性关系并构成相对应的映射关系。因此,在构建模型过程要经过从X到输入量化器M的映射、从M到空间存储器A的映射、从A应用杂散技术到实际空间Ap的映射以及A p经过权值叠加到F映射这4个步骤。

图1 标准状态下的CMAC网络结构Fig.1 Standard state of CMAC network structure
2 CMAC疲劳监测控制系统的构建
将不同的探测器材及其平台、测量设备、传感器以及终端设备,对互补或冗余的疲劳特征信息进行有机融合,进而建立疲劳生产的智能决策模型,对矿工是否疲劳生产进行监测,并准确可靠判断,最后输出报警信息或强制将所使用的机械进行被迫停止的要求,并将检测结果实时显示,具体系统结构如图2所示。
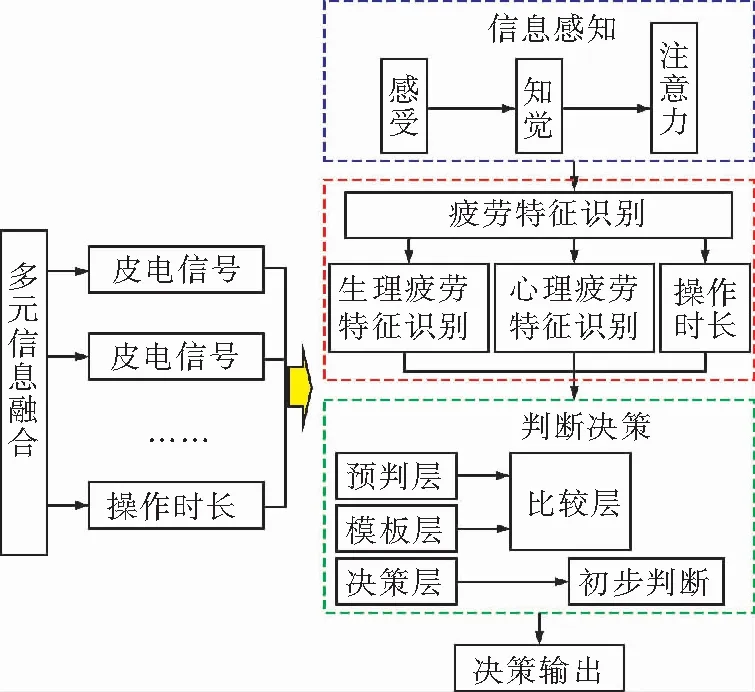
图2 多元信息融合的矿工疲劳检测控制系统Fig.2 Miners fatigue monitoring and control system based on multivariate information fusion
矿工疲劳检测控制系统的主要分为信息感知、疲劳特征识别、判断决策和决策输出4个阶段。这4个阶段,主要通过收集矿工务工期间不同时段人的眼皮闭合频率、瞳孔涣散程度、心率、脑电信号、皮电信号及操作机械时长等方面信息完成对矿工的检测与控制。
2.1 信息感知
虽然矿工所需要操作的工作程序较为简单,但是,由于矿工容易受到外界的干扰和生理与心理条件的束缚,很难保证矿工会做出正确的选择和行为来维护自身和生产的安全。因此,需要把抽象、信息感知阶段的状态定量化,对测试信号进行集中采样,测试矿工疲劳感知瞬间的所有信息水平。
信息感知是系统监测的第一阶段,由感受水平、知觉水平和注意力程度3个子模块组成。通过感觉的瞬时记忆、接受信息瞬间情绪(知觉)和注意力的综合反映。已有研究发现,信息感知部分的基本数据来自于大脑的alpha频段的右枕叶和顶叶部位、beta频段的中间区域、gamma频段的左额叶和右颞叶、呼吸频率和脉搏次数。
2.2 疲劳特征识别
在经过信息感知阶段后,即可进入对矿工的疲劳特征识别阶段,包括生理疲惫探测系统、心理情绪探测仪、操作时长信息面板3个子模块。其中,生理疲惫探测系统的使用目的在于收集矿工务工期间的眼动水平、心率和脑信号等,而心理疲劳则通过脑电、皮电可以收集到矿工务工期间的心理活动状态波动数据。最后为操作时长信息面板,它可以显示矿工在务工期间的工作时长,以便收集该矿工在务工期间的疲劳时段的相关数据。
疲劳检测控制系统所需仪器包括Neur One脑电测试仪、Bio Lab多导生理仪、Tobii Studio 眼动测试仪和计时器。根据每个仪器输出的信号的不同测试部位进行梳理与分类,具体参数见表1.
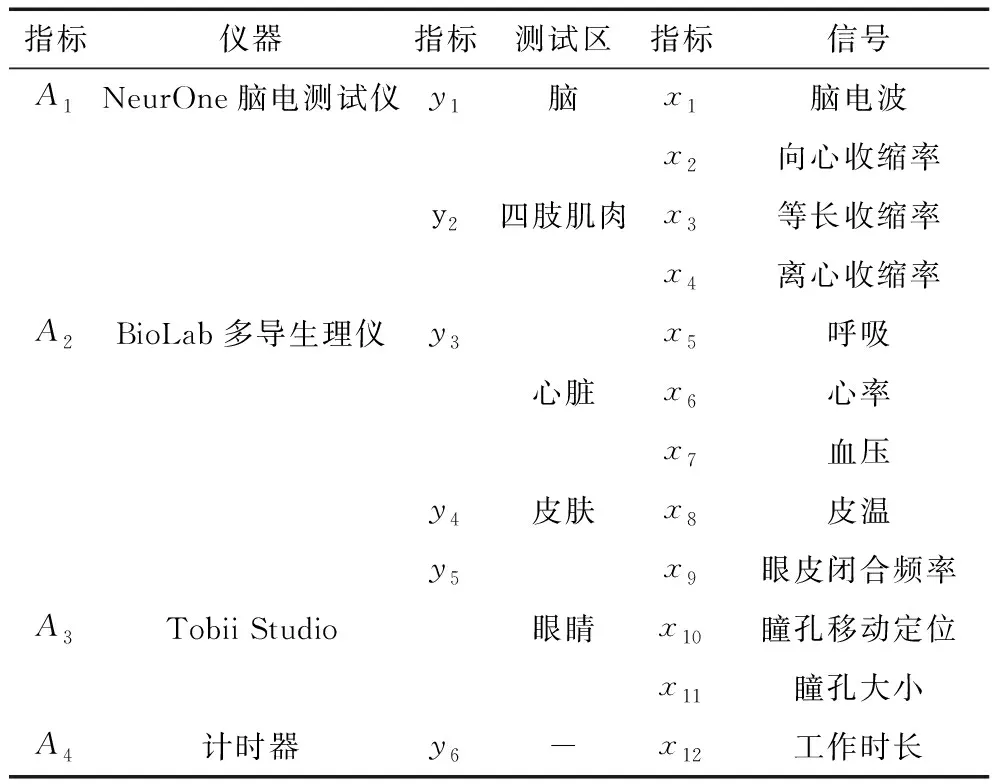
表1 测试仪器系统相关信号的分类与整理Tab.1 Signal classification of test-instruments
2.3 判断与决策输出模型构建
矿工随着工作时长的影响,自身的感觉器和生理记忆信息会传输到大脑,经过判断如何行动和反应的过程。在矿工疲劳检测控制系统第三阶段,将判断决策阶段分为了预判层、模板层和决策层3个模块,将比较器传来的矿工生产行为和状态进行识别,结合小脑神经网络理论进行判断与决策输出。
该模型可对矿工监测数据进行分析,利用矿工疲劳过程中的违章状态和行为发出报警和声控信号来操纵控制所操作的机械,从而提醒矿工注意休息或谨慎工作,必要将报警信号传输至管理层安排轮班换岗,若信号未消除,则报警信号传输至该矿工所操作的机械或设备上,强制停工,避免因过度疲劳超负荷生产而导致事故的发生。
在矿工疲劳检测控制系统中,主要通过各传感器、信号接收器、探测仪等收集到矿工的感受信号、知觉信号、注意力信号、眼动状况、心跳频率及脑电信号、皮电信号以和操作时长等信息。因此,对矿工多生理信号进行如下的信息融合处理。
2.3.1 标准的界定与数据预处理
信号体系是统一整体,包含了信号的纵向层次关系和平行关系。其中,不同的指标反映着人体不同部位和不同程度的疲劳分属的阶段。可以将信号体系定为基础层、信号层、系统层和目标层4个层次。将所监测的2个阶段定为信息感知、疲劳特征识别连个层次。依据人体疲劳标准,形成生理监测信号对应人疲劳程度的评价标准,见表2.
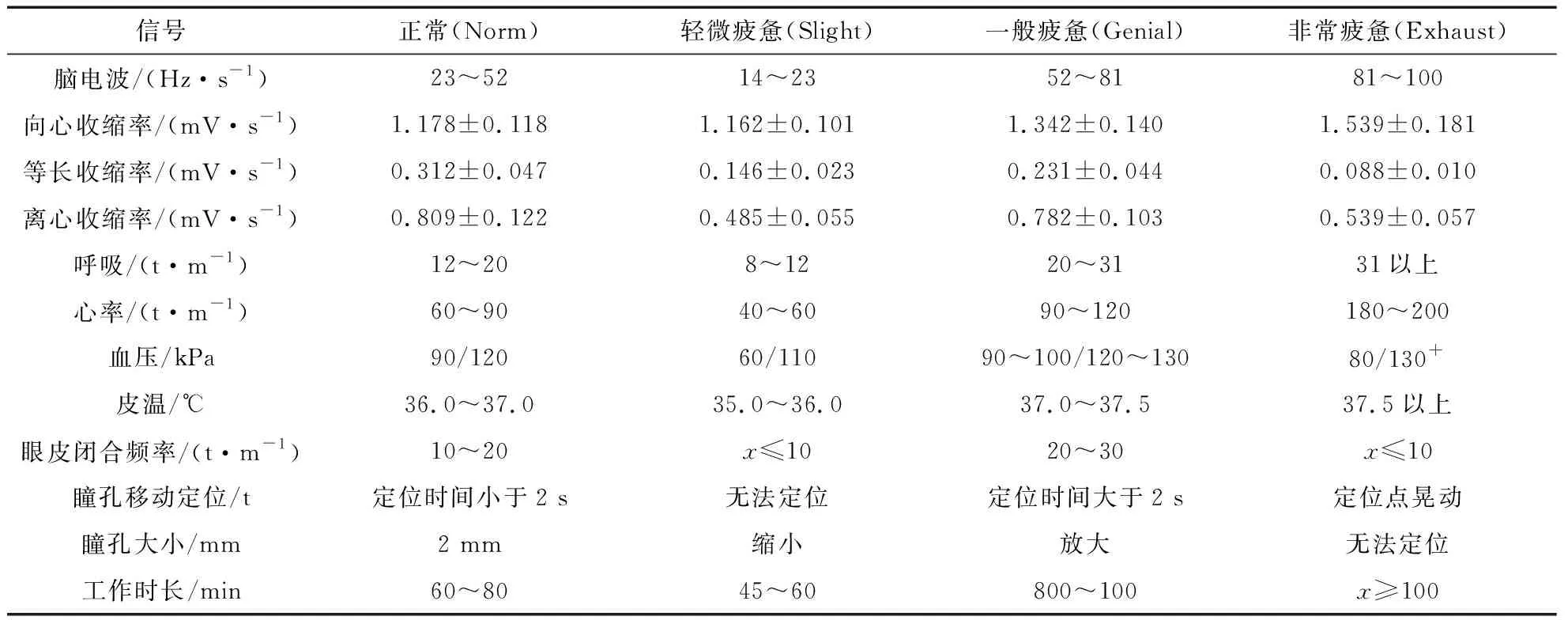
表2 分类信号的疲劳水平标准划分Tab.2 Classification signal of fatigue horizontal standard
为解决异类信号不兼容无法统一分析的问题,将粗大误差样本信号与缺失信号利用信号分布规律进行填补,将不同的信号进行异类信号的归一化处理(标么化)。设原始连续信号f(t)在时间轴和频率轴上都是紧支撑的,那么时域表示固定的区间[-tb/2,tb/2]上,频域表示在区间[-fb/2,fb/2]上,tb和fb分别为信号的时宽和带宽,信号时宽的带宽积为N=tbfb,由于时域和频域具有不同的量纲,则需将时域和频域分别转换成量纲为一的空间域上。因此引入时间量纲的尺度因子S,并定义新的尺度化坐标为
(1)
新坐标系(x,v)实现了量纲归一化(量纲为1),信号在新坐标系中被限定在区间[-tb/(2),tb/(2S)]和[-fbS/2,fbS/2]内,使得2个区间长度相等,选择时间量纲S为(tb/fb)1/2,则有区间长度为xb=(tbfb)1/2,即区间的归一化为[-xb/2,xb/2].那么归一化后的尺度因子S和归一化宽度xb分别为
(2)
(3)
2.3.2CMAC信号分类结构与算法
如图3所示为矿工疲劳监测控制系统的二维输入/一维输出的CMAC模型结构,具体测试信号见表1.20个信号从不同的时段输出,把时段作为不同信号空间,称为“段”;总共输出的20个信号Y={y1,y2,…,y20},称为“因素”;由每个“因素”特征向量的维度,由每个“因素”组成的集合空间称为“元素”,即每个部位的信号集合;而输入变量被量化为n个离散的区域,即每个测量信号的信号组合为一个维度空间,把这个维度空间称为“块”,如本例中块M=2,区的宽度影响CMAC的泛化能力。

图3 矿工疲劳监测控制系统CMAC网络结构Fig.3 Neural network contracture of miner fatigue monitoring and control system
那么,该系统的具体分层计算公式如下:
该系统总共分为3层,输入层,融合层,输出层。第一层即输入层,分为2个阶段,分别为设备输入层和信号输入层。
输出层第一阶段:实现将不同测试仪器的特征向量{a1,a2,…,a5}引入网络。则有
(4)

输出层第二阶段:将设备输入的信号特征向量{y1,y2,…,y20}引入网络,为使对于A空间的每一个测试信号,在Y空间均存在唯一的映射。A存储区中单元的个数至少等于Y空间的信号个数,则有输出信号个数为
(5)
式中Yi(I2)为测试信号状态点个数;yi为第n个测试信号;m为为信号输入特征向量的维度。
第二层-融合层(中间层)。由于部分信号在不同时间段均有检测功能,则有完成输入信号特征向量的交叉融合的融合层(中间层)。满足分割最优化,采用聚类分析中的最优分割法对交叉信号的前后时间进行分割。确保相同的监测信号在不同时段相互交错影响而产生信号冲突。那么,则有
(6)

(7)

那么,融合层(中间层)输出关系为
(8)

(9)

第三层输出层。该层分为2个阶段,第一阶段用于实现以第二层求出的激活强度激活联想单元中的联想强度输入,第二阶段则进行输出。其输入输出关系为
输入关系Mij={x1ω1*x1ω2*…*xnωn}
(10)

(11)
式中ωn=1,2,…,n;*为乘机取小运算。
2.3.3CMAC的δ学习算法
CMAC的训练学习主要是调整2组参数(xij,yij),这2组参数的修正结合δ学习算法采用迭代法进行训练。定义用F0标识对应输入的D的期望输出权值,F0=(F01,F01,F03,…,F0n),权值调整公式为
ζ=F0j-F(X)
(12)

(13)
式中 |X*|为某一输入元素中同时激活为1的信号集合X*中包含的兴奋因素的个数;η为学习率。
通过上述对信号空间的分类,调整隶属函数的中心值和宽度就类似调整了如图2中“块”的划分方式和概括程度,从而达到调整模型内部的空间位置和对输入的覆盖程度的目的。由于在CMAC矿工疲劳监测控制系统中“块”的划分方式和概括程度可以实时调整,空间维数和存储空间也将大幅减少。
3 释例应用
实验选自有煤矿工作经验的32名男性,受试者年龄为19~29岁之间,平均年龄在22.5岁。利用构建疲劳监测和控制系统对被试者务工期间进行8 h的跟踪式监测,监测时长为7日。依据上述构建的监测信号体系与判断决策模型,将监测的数据作为释例进行说明。设期望输入的特征向量为{x1,x2},每个论域上定义为2块,则每个联想单元占用的储存单元数量为202=400个/min,那么,总共数据量为400×8×60×7=1 344 000个信号。在信息感知与疲惫特征识别这2个阶段中,而从检测角度来说,分为个体信号与信号检测部位2个部分。把人的测试区域共分为脑、心脏、皮肤、肌肉、眼睛及工作时长,CMAC矿工疲劳监测控制系统所监测的每个元素由不同部位的信号点组合,对应的输出向量为X={y1,y2,…,yn}表示一个监测部位信号点的个数。
3.1 信号预处理
本实验需监测样本信号1 344 000个,每一种信号监测112 000个。实际监测1 344 000个,所得有效信号样本为1 343 974个,粗大误差样本10个,信号缺失16个,有效信号率为99.98%.利用不同信号的监测过程中分布情况,修正粗大误差样本信号并填补缺失信号,结合公式(1)至公式(3)对信号对监测信号进行标么化处理(归一化)。部分分类信号的标么化(归一化)处理结果见表3.
3.2 δ学习算法定权
为保证每个信号所占矿工疲劳水平的覆盖比例自适应不同矿工个体的特殊性,利用Matlab2016a输入公式(12)至公式(13)的δ学习算法进行编程并定权,权重计算结果见表4.

表3 矿工疲劳水平的多元异类信号标么化(归一化)处理结果Tab.3 Miner’s fatigue level multivariate heterogeneous signal normalization(standardization)processing results

表4 δ学习算法的样本信号定权Tab.4 δ Learning algorithm sample signal fixed weight
根据表5所列结果可知,检测信号的重要度从高到低的排序依次皮温>肌肉>瞳孔大小>脑电>眼皮闭合程度>瞳孔移动距离>呼吸>心率>工作时长>血压,弥补了仅利用单一信号设备监测矿工疲劳水平“以偏概全”的缺点。
3.3 分析与验证
在该系统中,假设信号体系有yij个,评价等级为nk,那么yij作为CMAC的网络输入,nk作为模型输出。将网络的输入信号的每一“因素”依据人体疲劳水平标准界定划分为4个等级,将选取的12个信号作为输入,疲劳等级nk作为输出。设定泛化参数C=6,取32名被试者的前6×105个信号样本作为训练样本,其余作为检验样本。运用Matlab 2016a软件对公式(4)至(11)进行编程,具体结果如图4所示。
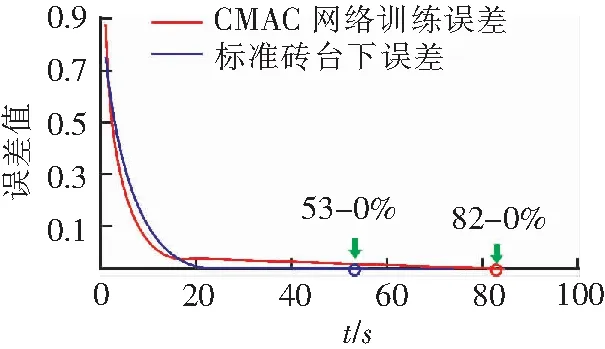
图4 CMAC网络训练误差曲线Fig.4 Error parameter of CMAC network training
根据图4曲线变化分析,前6×105个训练样本在第82次学习后基本和期望输入值得偏离值为0.99,说明训练效果良好。同时,CMAC网络的收敛速度快,经过少量的轮训次数,即可达到预期监控的水平。图5为运用CMAC疲劳监控系统与传统单一信号监测系统同时进行为期8小时监测的某一矿工的疲劳水平数据比较结果。由图可知,利用实时性。
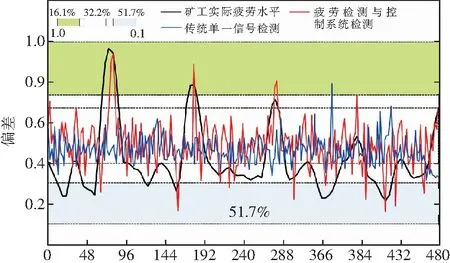
图5 多元信息监测结果对比与分析Fig.5 Comparison of monitoring results and traditional single signal monitoring results
利用CMAC作为矿工疲劳监测与控制系统过程中的判断与输出层分析模型,监测值与矿工实际疲劳趋势平均偏差不超过0.2,符合矿工疲劳监测精度要求。偏差为0.1~0.3的约占51.7%,0.4~0.7的约占32.2%,0.8~1.0的约占16.1%,证明CMAC网络的疲劳监测与控制系统可靠,具有较强的泛化能力,在满足精度监测要求的前提下,表现较快的收敛速度,这说明在监测应用方面明显具有可适性和实时性。
利用剩余744 000个样本对矿工进行疲劳监测,同样采用Matlab 2014a的CMAC数据拟合代码进行样本的数据拟合,计算结果如图6所示,32名被试者每日8小时跟踪监测的一周疲劳水平,处于非常疲劳和轻微疲劳状态的矿工人数较多,分别占总数41.2%和27.3%.其中,在无休息状态下,矿工工作2~5 h内疲劳状况最为严重,有3.68%矿工因务工前期未合理安排时间、心里倦怠等原因,开始工作时就处于非常疲惫的状态。
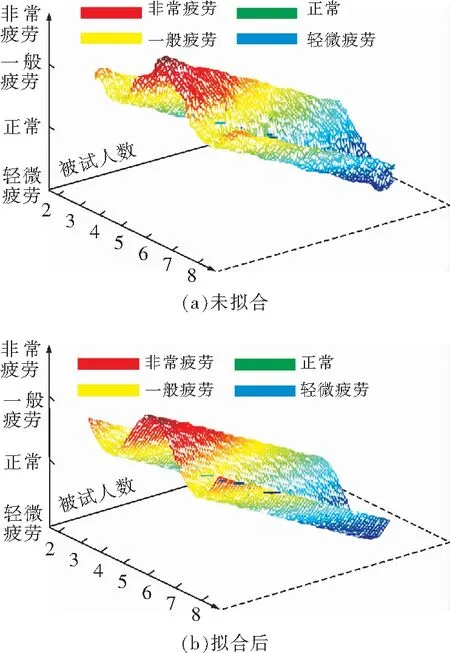
图6 被试矿工的疲劳水平数据拟合结果Fig.6 Comparison of fitting results between miner’s fatigue level
3.4 管控预案
在人体对声波的敏感性研究基础上,结合安全生产理论中的疲劳监测控制原理,分析监测结果,提出矿工疲劳水平管控预案
1)强制操作设备停车。依据金融风险规避理论,当矿工疲劳状态已经超过身体负荷状态时,矿工极易出现由于生理与心理的倦怠,因而导致矿工在生产过程中出错率升高,该情形已成为高度危险的状态。一旦有矿工由于急于赚钱的心理不愿离岗,危险发生,则后果无法承担。因此,在高危状态下,只有通过控制机械,强迫施工器械停车,迫使矿工停工休息,才能在生产过程中保护矿工不受到疲劳生产所带来的危害;
2)强迫矿工换班/岗。依据金融风险对冲和风险转移理论,当矿工处于较为疲惫状态但还未超出身体负荷时。班组长接收到某矿工身体疲劳的报警提示,此时,班组长可采用矿工换班(岗)形式,将疲劳矿工调整到低危工作区,将无明显疲劳状态的矿工调整到高危工作区。以此将某些具有不同收益的岗位进行组合,利用风险对冲和风险转移的特性保证当天的生产量;
3)发出调整状态的提示。依据人体对声波敏感性的特点,当矿工处于轻微疲劳时,对矿工务工期间发出调整状态的提示音。提醒矿工调整当前疲劳务工的状态,避免出现更严重的疲劳状态。
依据提出的管控预案,结合CMAC自动输出的管控结果,采用管控预案对上述32名矿工的疲劳务工状态进行控制,具体CMAC自动输出的管控结果如图7所示。
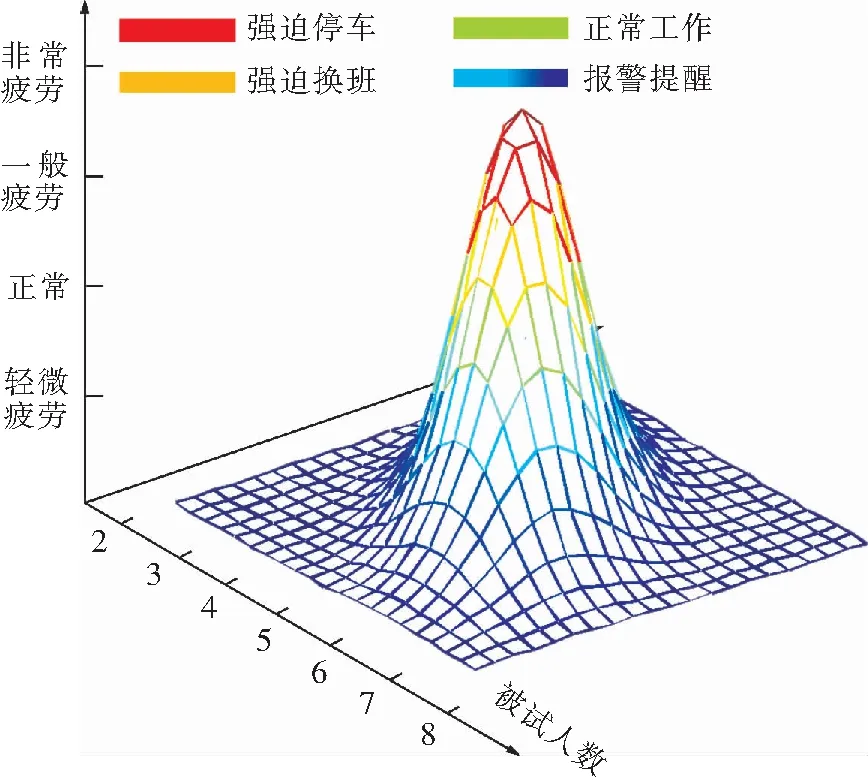
图7 不同疲劳水平的矿工控制策略结果Fig.7 Miner control strategy for different levels of fatigue
从图7可知,9名矿工被强迫停车休息,占监控总人数的28.13%;6名矿工被调班(岗),占监控总人数的18.75%;8名矿工接到调整状态的报警提示,占监控总人数的25%;10名矿工务工期间未出现疲劳状态,占总人数的31.25%.依据该分布状态。可以针对不同矿区生产状态,调整管控方法,为矿区的安全生产提供有力的保障。
4 结 论
从人因安全理论的2个维度和心理倦怠的6个阶段,结合矿工务工期间的实际情况,分别从人体6个部位进行监测,结合神经网络中小脑模型的理念与系统自筛选的特性,从多元信息融合的角度将监测方法从单一信号的监测上升到多元信号的监测,确定了监测矿工疲劳水平的12信号与指标,设计了矿工疲劳水平监测的信号体系。
在构建的监测信号体系的基础上,依据CMAC模型结构和分类算法,构建了矿工疲劳监测控制系统模型,基于小脑神经网络理论的矿工疲劳监测控制系统模型与单一信号监测矿工疲劳的系统相比,从结构上规避了从多对一的映射复杂性和耗时性,并解决了监测过程中信号交叉问题。提高了监测矿工疲劳水平的精度。
在建立矿工疲劳监测控制系统模型的基础上,监控了32名矿工7天8小时的疲劳水平,以此为数据对模型进行了验证,结果表明:处于非常疲劳和轻微疲劳状态的矿工占多数,分别占总数的47.3%和41.2%.其中,在无休状态下,矿工工作2~6 h时疲劳状况最为严重,有少数矿工由于务工前期未合理安排时间、心里倦怠等原因也处于非常疲惫的状态。依据矿工不同的疲劳状态,提出了强迫机械被迫停车、强迫换班或报警提醒等措施。为后续矿工在务工时期的电子监测和仿真理论领域提供了一定的参考。
参考文献(References):
[1] 魏绍敏,田水承,陈勇刚.矿山人因事故的构成要素及分类初步研究[J].煤炭技术,2003,22(10):1-2.
WEI Shao-min,TIAN Shui-cheng,Chen Yong-gang.Research on component factors and classification of mine personel accident[J].Coal Mine Technology,2003,22(10):1-2.
[2] 孙继平.煤矿井下人员位置监测系统联网[J].煤炭科学技术,2009,27(11):77-80.
SUN Ji-ping.Networking of underground mine personnel position monitoring and measuring system[J].Coal Science and Technology,2009,27(11):77-80.
[3] Karthaus Melanie,Wascher Edmund,Getzmann Stepha-n.Proactive vs.reactive car driving:EEG evidence for different driving strategies of older drivers[J].Plos One,2018,13(1):10-22.
[4] KANG Jia-jie,XU Bin-shi,WANG Hai-dou.Delamination failure monitoring of plasma sprayed composite ceramic coatings in rolling contact by acoustic emission[J].Engineering Failure Analysis,2018,86(3):131-141.
[5] Lal Skl,Craig A.A critical review of the psychophysiology of driver fatigue[J].Biological Psychology,2001,55(3):63-77.
[6] Ji Q,Zhu Z W,Lan P L.Real-time nonintrusive monitoring and prediction of driver fatigue[J].IEEE Transactions on Vehicular Technology,2004,53(4):1052-1068.
[7] 田水承,乌力吉,寇 猛,等.基于生理实验的矿工不安全行为与疲劳关系研究[J].西安科技大学学报,2016,36(3):324-330.
TIAN Shui-cheng,WU Li-ji,KOU Meng,et al.Relationship between miners’unsafe behavior and fatigue based on physiological experiment[J].Journal of Xi’an University of Science and Technology,2016,36(3):324-330.
[8] YIN Wen-tao,FU Gui,YANG Chun,et al.Fatal gas explosion accidents on Chinese coal mines and the characteristics of unsafe behaviors:2000-2014[J].Safety Science,2017,92(6):173-179.
[9] 李乃文,张 丽,牛莉霞.不同作业阶段矿工安全注意力的事件相关电位研究[J].中国安全生产科学技术,2017,13(8):96-101.
LI Nai-wen,ZHANG Li,NIU Li-xia.Research on event-related potentials for safety attention of miners in different operation stages[J].China Science and Technology Information,2017,13(8):96-101.
[10] 邢娟娟.煤矿工人体能负荷与工伤事故关系研究[J].中国安全生产科学技术,2005,1(4):19-21.
XING Juan-juan.Study in the relation between fatigue of coalminers and coal mine accidents in China[J].Journal of Safety Science and Technology,2005,1(4):19-21.
[11] 成 波,冯睿嘉,张 伟,等.基于多源信息融合的驾驶人疲劳状态监测及预警方法研究[J].公路交通科技,2009,26(3):13-18.
CHENG Bo,FENG Rui-jia,ZHANG Wei,et al.Driver drowsiness detection and warning system based on multi-source information fusion[J].Journal of Highway and Transportation Research and Development,2009,26(3):13-18.
[12] 周姝春.CMAC学习性能及泛化性能研究综述[J].计算机仿真,2005,22(6):5-7.
ZHOU Shu-chun.Reserarch on learning and generalization capability of CMAC:an overview[J].Computer Simulation,2005,22(6):5-7.
[13] Albus J S.A new approach to manipulator control:the Cerebellar Model Articulation Controller(CMAC)[J].Journal of Electronic Control,1975,97(13):220-227.
[14] Kotani K,Shibata T,Ohmi T.Impact of high-precision processing on the functional enhancement of neuron-MOS integrated circuits[J].IEEE Transform Electron,1996,79(3):407-414.
[15] Juang Jih Gau,Lee Chia Lin.Applications of cerebellar model articulation controllers to intelligent landing system[J].Journal of Universal Computer Science,2009,15(13):2586-2607.
[16] LIN Fa-jeng,LU Kuang-chin,YANG Bo-Hui.Recurrent fuzzy cerebellar model articulation neural network based power control of a single-stage three-phase grid-connected photovoltaic system during grid faults[J].IEEE Transactions on Industrial Electronics,2017,64(2):1258-1268.
[17] 朱家群,邹 凌,孙玉强.CMAC神经网络与PID复合控制的应用研究[J].微计算机信息,2006,13(7):59-61.
ZHU Jia-qun,ZOU Ling,SUN Yu-qiang.Application of CMAC neural network and PID compound control[J].Microcomputer Information,2006,13(7):59-61.
[18] 徐 德,谭 民.一种FCMAC及在Wiener模型辨识中的应用研究[J].信息与控制,2002,31(2):159-163.
XU De,TAN Min.A siso fuzzy FCMAC and its application in parameter identification of Wiener model[J].Information and Control,2002,31(2):159-163.
[19] 侯媛彬,杜京义.改进小脑模型网络的干式变压器卷线机跑偏信号谐波分析[J].西安交通大学学报,2005,39(10):1092-1096.
HOU Yuan-bin,DU Jing-yi.Harmonic wave analysis method of improved cerebellar model articulation control for coil winder of dry-type transformer[J].Journal of Xi’an Jiaotong University,2005,39(10):1092-1096.
[20] Miller T W,Hewes R P,Glanz F J,et al.Real-time dynamic control of an industrial manipulator using a neural-network-based learning controller[J].IEEE Transactions Robot Automatic,1990,6(1):1-9.
[21] Lane S H,Handelman D A,Gelfand J J.Theory and development of higher-order CMAC neural networks[J].IEEE Control System Magazine,1992,12(2):23-30.
