基于WRP点云三维物体的优化分层研究*
2018-05-30郑立婷桂进斌
郑立婷,桂进斌,刘 超
(昆明理工大学 理学院,云南 昆明 650500)
全息术作为能够提供人眼视觉系统所需全部深度信息的三维显示技术,越来越受到人们的关注。然而,在涉及空间曲面衍射场计算的三维物体计算全息图的生成过程中,通常将三维物体离散为大量面光源[1-5]或点光源[6-9]的集合。其中,点源的计算较为直观,实现操作简单,但由于点源采样量巨大,将每个物点衍射计算到全息面并进行叠加计算形成全息图需要消耗大量时间;因此,如何能快速的生成计算全息图成为制约全息三维显示的瓶颈问题之一。
为减少计算时间,Shimobaba等[10]提出了一种波前记录方法(WRP),该方法是在物面和记录面之间定义一个虚拟平面,将组成三维物体的每一点球面波计算到虚拟平面上,然后对虚拟平面通过傅里叶变换,从而得到记录平面的全息图。由于该方法只计算到虚拟平面一个很小的有效区域,因而能够减少计算全息的空间冗余度,从而减少生成计算全息图的时间。在WRP算法的基础上, P. Tsang等[11]给出了IWRP 的方法,提高了数字全息图的刷新速率。Hoang-Anh Phan等[12]给出了基于GPU并行计算下双层WRP算法,该方法是将WRP面放置在全息面和物体之间,考察不同位置的WRP对重建像质量的影响;但对目前文献中存在点源WRP方法进行实际研究中发现,文献中的方法没有给出三维物点与WRP虚拟平面有效距离,也没有具体的WRP虚拟平面放置的最优位置,以及WRP分层计算中三维物体的最优分割层数来减少计算过程的计算量。
本文通过对WRP理论方法的实际研究,给出WRP虚拟平面采样像素间距与三维物点在WRP平面有效像素距离的关系,并在此基础上,通过对相近景深不同三维物体及不同景深同一三维物体,根据WRP方法进行实际分层的数值模拟计算分析,得出三维物体WRP分层计算的最优化分层数目。模拟及光电再现结果表明,该方法能在一定程度上减少全息图生成的计算量,并且重建像质量较高。
1 WRP简介
WRP算法过程示意图如图1所示。将与全息面同等大小且像素间距相同的虚拟的波前记录平面(WRP虚拟平面),放置在靠近物体并与全息面平行的位置。在计算过程中,只需计算物体点与有限大小全息面形成的立体角与靠近物体的WRP面相交的有效区域的像素点。由于无需计算每个物体点与全息面所有像素点衍射计算的叠加运算,其计算量大大减小,并将点光源转换为WRP面光源,利用衍射理论进行计算,使得计算速度得到很大提高。
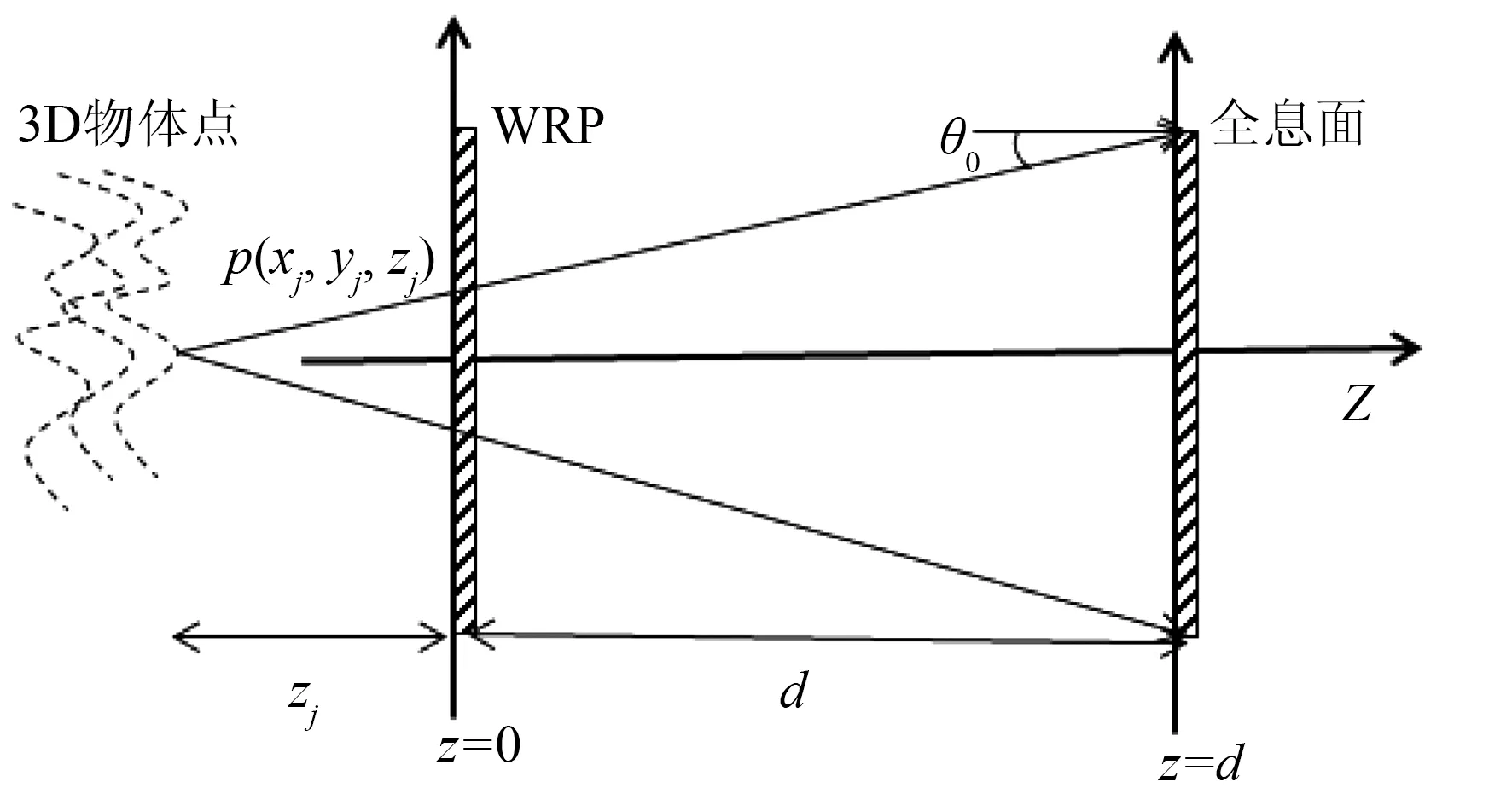
图1 WRP算法过程示意图
WRP面光场计算式为:
(1)


(2)
式中,F-1为傅立叶逆变换;h(x,y)为传递函数。h(x,y)计算公式如下:
(3)
全息面的最大衍射角θ0计算式为:
(4)
式中,p为全息面像素大小;θ0为全息面最大记录角度。由式4可知,θ0取决于入射波长λ及像素间距p。设WRP有效的像素区域的半径为w,则由式5计算得到WRP面x轴、y轴有效像素尺寸w为:
(5)
由式5可看出,WRP有效像素尺寸随zj的增大而增大,从而影响计算时间。从理论上讲,当WRP虚拟平面与最近物点相切(即zj=0)时,有效区域像素最小,此时计算速度最快;而要保证每个物点在WRP虚拟平面至少有一个有效像素,因此存在物点靠近WRP虚拟平面最小距离δ问题。由式5可知,当三维物体景深较大时,远距离物体点计算到WRP平面有效像素区域增大,从而造成计算全息图生成时间增加,此时可以考虑将组成三维物体点云数据进行分层计算,将远距离WRP平面物体点球面波计算到临近的物体点的WRP层平面上,长景深物体可以进行多次分层计算,从而减少远距离物体点在WRP平面上的有效区域像素点,加快计算速度。
2 WRP方法的三维物体优化分层
由于WRP虚拟平面的有效像素面积Lx×Ly线性的取决于zj的平方,所以,如果zj的距离增加,则相应WRP有效区域面积变大,计算时间增长;反之,WRP有效区域面积越小,计算量越少,计算时间缩短。理论上讲,当WRP虚拟平面与距离物体最近点相切时,WRP有效区域面积最小,但应保证每个物体点在WRP面上至少有1个有效像素。
WRP分层原理图如图2所示。由图2可知,物体点与WRP虚拟平面最近的微小距离δ与WRP面像素间隔Δp,物点与全息面距离H及LCOS尺寸L满足:
(6)
因此,为了保证每个三维物体点在WRP平面上至少有1个有效区域像素值,组成三维物体点云数据靠近WRP平面最近距离点的距离应大于最小距离δ。
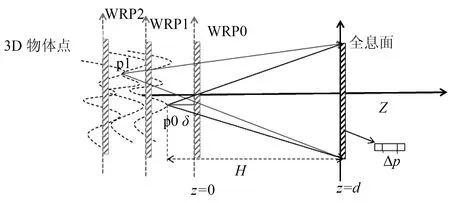
图2 WRP分层原理图
当三维物体景深较大时,由于远距离物体点zj较大,WRP平面有效区域像素增加,导致WRP平面计算量增加,计算速度较慢,此时应将三维物体进行分层。将三维物体点分为多层,每层对应的物体点由式1将球面波计算到临近的WRP平面上,再由式2将每层WRP平面面光源衍射计算到全息面进行叠加运算,此时全息面物光场可表示为:

(7)
将参考光与式7计算物光场计算得全息图。由WRP分层原理可知,三维物体分层越多,三维物体点到对应每层WRP虚拟平面计算量越少。由式7可知,由于全息面物光场是每层WRP平面面光源衍射到全息面光场的叠加,每层面光源衍射计算都需要相应的时间,因此,三维物体分割层数存在最优分割层数的问题。
为了得到不同三维物体的最优化分层,分别进行景深为z=6.16 mm,23 982物点的恐龙三维模型和景深为z=6.03 mm,35 947物点的兔子三维模型的相近景深不同三维物体,以及景深分别为z=6.22 mm,z=10.26 mm,49 960物点的凳子的同一物体不同景深的2组优化分割模拟计算。根据式6计算,取δ=0.8 mm,WRP0平面位于z=0处,其余WRP平面位置依据景深均分,衍射距离d=500 mm,实验模拟环境采用Windows 7 64位操作系统,8 GB内存,Intel(R) Core (TM) i5-3470 CPU @3.2 GHz,模拟软件使用MATLAB 2014b,生成全息面像素为1 000×1 000,计算时间包括物点球面波计算到对应WRP平面及所有WRP面光源衍射计算到全息面的叠加时间,结果分别见表1和表2。

表1 相近景深不同三维物体全息图生成时间 (s)

表2 同一三维物体不同景深全息图生成时间 (s)
由表1和表2可知,不管对于相近景深不同三维物体还是不同景深同一三维物体,当三维物体分层在3层或者4层时,全息图生成计算时间最快;因此,对于点云数据组成的三维物体,当使用WRP方法进行计算时,将三维物体分为3层或4层计算都得能到最快的计算速度。
3 光电再现实验
光电再现实验光路图如图3所示。采用波长为λ=0.532×10-3mm的绿光半导体激光器作为重现参考光,激光自左向右依次经过衰减片P,经扩束镜及准直透镜L后,投向分辨率为1 920×1 080 pixels,像元宽度为0.006 4 mm的纯相位反射式空间逛调制器(LCOS)的液晶面板,经SLM反射后在观察屏获取三维物体再现像。

图3 光电再现光路图
将景深为z=6.22 mm不同景深同一三维物体按最优化分割层数分为3层,模拟分层及光电再现结果如图4所示。



图4 不同景深同一三维物体模拟分层及光电再现图
将景深为z=6.16 mm的恐龙三维模型和景深为z=6.03 mm的兔子三维模型,分别进行4层WRP分割,并进行叠加衍射逆运算重建在第1层,模拟及光电再现结果如图5所示。



图5 相近景深不同三维物体重建及光电再现图
从模拟及实验结果中可以看出,本文所提点云三维物体WRP分层优化方法,不仅能够得到最优化的分层及计算速度,而且三维模拟及光电再现成像质量较高,说明了本文所提方法在三维物体分割及重建方面是可行的,是一种优化三维物体分割的有效方法。
4 结语
本文通过对WRP波前记录平面方法的理论研究,主要对点云三维物体的WRP分层优化问题进行了细致的数值计算。通过对相近景深不同三维物体及不同景深同一三维物体进行WRP分层计算研究结果表明,将三维物体分为3层或4层计算能得到最快的计算速度。模拟及光电再现实验的结果表明,本文所提优化分割方法能够优化三维物体分层及计算速度,而且成像质量较高。该方法对全息三维显示计算全息图的快速计算提供了有益的参考。
[1] Matsushima K. Computer-generated holograms for three-dimensional surface objects with shade and texture.[J]. Applied Optics, 2005, 44(22):4607.
[2] Lee B, Kim H, Hahn J. Mathematical modeling of triangle-mesh-modeled three-dimensional surface objects for digital holography[J]. Applied Optics, 2008, 47(19):117-127.
[3] Pan Y, Wang Y, Liu J, et al. Fast polygon-based method for calculating computer-generated holograms in three-dimensional display[J]. Applied Optics, 2013, 52(1):A290.
[4] Nishi H, Matsushima K, Nakahara S. Rendering of specular surfaces in polygon-based computer-generated holograms[J]. Appl Opt, 2011,50(34): 245-252.
[5] 李俊昌, 桂进斌, 楼宇丽,等. 漫反射三维物体计算全息图算法研究[J]. 激光与光电子学进展, 2013, 50(2):119-125.
[6] Takada N, Shimobaba T, Nakayama H, et al. Fast high-resolution computer-generated hologram computation using multiple graphics processing unit cluster system[J]. OPT APPL, 2012, 51(30):7303-7307.
[7] Chen R H, Wilkinson T D. Computer generated hologram with geometric occlusion using GPU-accelerated depth buffer rasterization for three-dimensional display[J]. OPT APPL, 2009, 48(21):4246-4255.
[8] Pan Y C, Xu X W, Solanki S, et al. Fast CGH computation using S-LUT on GPU [J]. Optics Express, 2009, 17(21):18543-18555.
[9] Zhou C, Tsang P, Poon T C, et al. Holographic video at 40 frames per second for 4-million object points[J]. Optics Express, 2011, 19(16):15205.
[10] Shimobaba T, Masuda N, Ito T. Simple and fast calculation algorithm for computer-generated hologram with wavefront recording plane[J]. Optics Letters, 2009, 34(20):3133-3135.
[11] Tsang P W M, Poon T C. Fast generation of digital holograms based on warping of the wavefront recording plane[J]. Optics Express, 2015, 23(6):7667-7673.
[12] Phan A H, Piao M L, Gil S K, et al. Generation speed and reconstructed image quality enhancement of a long-depth object using double wavefront recording planes and a GPU[J]. OPT APPL, 2014, 53(22):4817-4824.