新型双足气体平衡机器人的设计*
2018-05-29张秋菊谭闽海周逸群乔永瑞潘鹏丞
□ 吴 逸 □ 张秋菊 □ 谭闽海 □ 周逸群 □ 乔永瑞 □ 潘鹏丞 □ 方 娟
江南大学机械工程学院 江苏无锡214122
我国仿人机器人研制起步较晚,但近年来发展迅速。目前,在人形机器人领域中,平衡性能研究的主要内容有平衡性理论基础、步态规划、平衡恢复和关节力矩约束条件分析等,更为普遍的是在机器人中通过附加配件、弹簧、气缸、机械阻尼等来增加平衡性能[1]。但目前平衡理论应用到实际人形机器人中还存在很多问题,如平衡效果不太理想,因此依然需要进行更深入的研究。王海燕[2]对国内仍处于空白阶段且具有负重能力的液压驱动双足机器人运动系统的机构设计、运动学分析、步态生成方法及稳定性控制等方面开展了深入研究。韩亚丽等[3]研究了一种基于零力矩点预观控制系统双足机器人稳定行走步行模式的生成方法。郭美玲等[4]设计了一种全新运动方式的搜救机器人,当遇到塌方障碍时可以通过弹跳和飘浮运动来穿越障碍物,到达需要探测地点,且运动平稳,节能环保,应用范围广。双足机器人是机器人研究领域最前沿的类型之一[5],而双足稳定行走则是双足机器人研究领域的首要目标[6]。所以,良好的平衡系统对于改善双足机器人动态特性、操作性能至关重要。笔者设计了一种新型双足气体平衡机器人,采用气体来增加双足机器人的平衡性能,使其能平衡稳定行走。
1 总体方案
1.1 承载气体与下肢材料选择
关于气体平衡机器人,方案设计的核心技术是利用气体浮力平衡机器人自身的质量。基于简易性和安全性原则考虑,笔者选用了氦气作为气球的气源,在保证气球密封性的同时,尽可能增大气球的体积,以及内部气体压力,以提升气球的浮力性能。笔者初步设计了双足气体平衡机器人的腿部尺寸,并进行运动学分析,应用MATLAB软件完成运动学计算并生成数据,采用Pro/E软件建立双足气体平衡机器人腿部模型,并完成仿真[7]。在试验过程中,笔者对双足气体平衡机器人的下肢用料进行改善,经多次试验后,采用伞骨代替最初设计的木棍作为双足气体平衡机器人的下肢,原因是伞骨的整体质量较木棍(包括衔接部分)要轻,并且它的单个平面自由度较木棍更加平稳,更重要的是伞骨有着竖直状态下的自我恢复能力。笔者通过三维打印技术打印出双足气体平衡机器人伞骨下肢,在关节连接处使用铰链结构,同样能够完成试验要求。
1.2 行走功能
目前机器人行走的主流驱动方式是关节电机驱动。机器人关节是机器人的基础部件,其性能的好坏直接影响机器人的性能[8];且电机驱动相比液压或气压驱动具有能量传递方便、信号传递迅速和标准程度高的优点[9]。但笔者没有选择与目前大多数双足机器人一样的关节电机驱动方式,因为在机器人下肢每个关节处安装电机,通过电机的转速配合来驱动机器人行走,除了较高的成本及复杂的程序和结构配合外,单是笨重的电机便无法达到笔者的预期目的。为此笔者专注如何简化伺服驱动装置,最终得出方案:由于双足气体平衡机器人下肢承受的重力大部分来自于电机,所以下肢的质心在电机安装位置,笔者选用SG90质量为9 g的舵机安装在双足气体平衡机器人下肢底端位置,使下肢质心集中在底端,用绳子一端缠绕在舵机旋转叶片上,能够承载一定的转矩,另一端绑在双足气体平衡机器人大腿部位。当舵机旋转叶片端离双足气体平衡机器人大腿捆绑部位距离最近时,绳子处于绷直状态,这样使双足气体平衡机器人在行走过程中,绳子始终处于绷直状态,当舵机转动时,旋转叶片会通过绳子的牵引带动双足气体平衡机器人下肢抬起,同时双足气体平衡机器人的质心明显前移,有向前移动的趋势,足够带动双足气体平衡机器人上半部分向前移动,从而实现行走功能。
双足气体平衡机器人运动原理如图1所示。
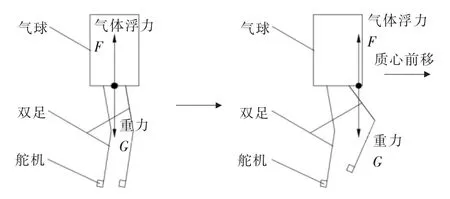
▲图1 双足气体平衡机器人运动原理
1.3 避障功能
双足机器人具有较高的避障行走能力,能够实现在各种不同复杂地面上行走,在仿人双足机器人技术产业发展中具有广阔的应用前景[10-12]。为了实现避障行走功能,双足气体平衡机器人需对其所在位置信息做出反馈,笔者使用HC-SR04超声波测距传感器来完成这一功能。这种超声波测距传感器的质量较轻,在双足气体平衡机器人的承受范围内,同时它可以通过发射和接收超声波,感应5~200 cm的距离。笔者只要调节HC-SR04超声波测距传感器能够感应到的最小距离,再通过编程控制SG90舵机差速转动,可使双足气体平衡机器人两下肢行走改变方向,改变直行的状态,就可以实现其避障功能。笔者在机器人的不同位置安装超声波测距传感器,经多次试验得出结论,超声波测距传感器固定在下肢顶端横杆处和安装在下肢底端舵机旁,均可对距离进行相对精确的测量。最终笔者使用Arduino Mega2560单片机来控制驱动舵机,完成了双足气体平衡机器人避障功能的设计。
2 机械结构
2.1 机械装置
双足气体平衡机器人模型如图2所示,其主要结构有气球、SG90舵机、HC-SR04超声波测距传感器、伞骨等。
2.2 机械控制
当左右舵机转速相同时,双足气体平衡机器人稳定直线行走。当HC-SR04超声波测距传感器检测到双足气体平衡机器人的前面有障碍物,且障碍物在5 cm时,超声波测距传感器将信号反馈给计算机,计算机做出反应,发出转弯信号,舵机差速转弯。

▲图2 气体平衡机器人模型
双足气体平衡机器人行走控制流程如图3所示,超声波测距传感器测距试验数据如图4所示。
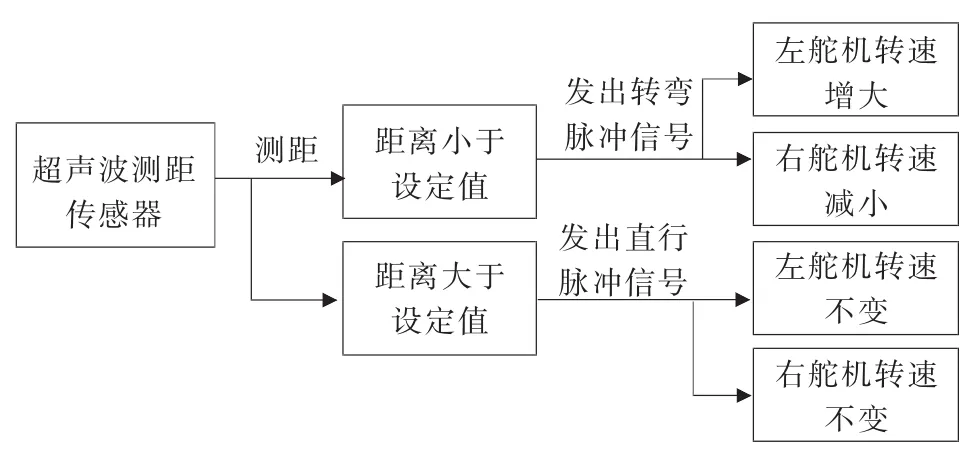
▲图3 双足气体平衡机器人行走控制流程
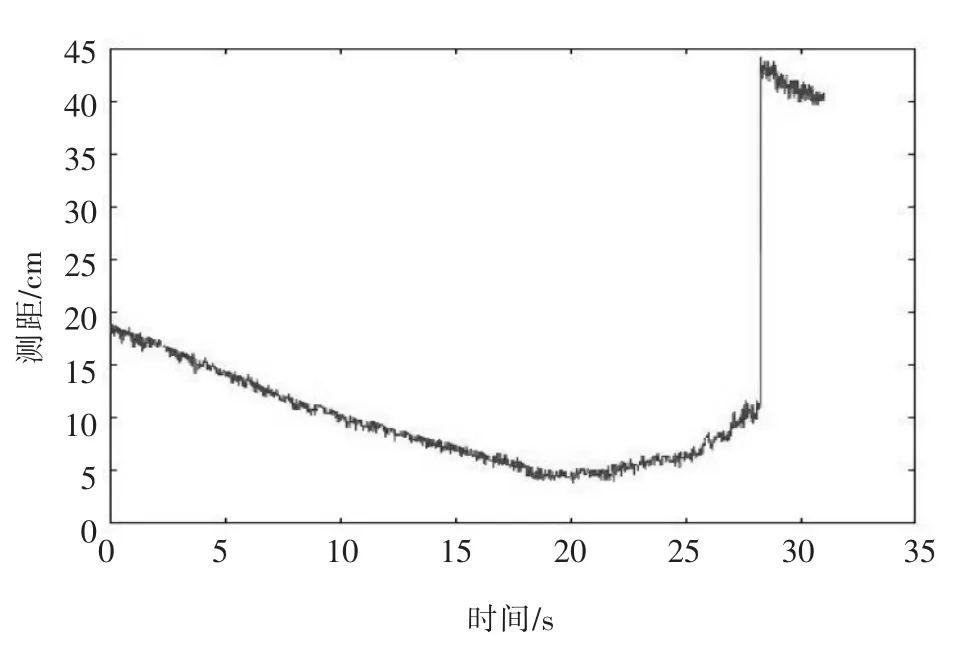
▲图4 超声波测验距传感器测距试验数据
由图4可以看出,在0~18 s时,HC-SR04超声波测距传感器测得的双足气体平衡机器人离障碍物的距离随双足气体平衡机器人向障碍物的移动而递减;当在18~20 s时,双足气体平衡机器人与障碍物距离小于5 cm时,双足气体平衡机器人开始转弯,双足气体平衡机器人与障碍物距离逐渐增大,当超声波测距传感器测得双足气体平衡机器人与障碍物距离大于设定阈值后,判定为转弯完成,双足气体平衡机器人又开始直行,直到遇到下一个障碍物,再重复上述过程。
3 操作过程
首先给气球充氦气,使气球的浮力约等于双足气体平衡机器人下肢承受的重力,然后通过Arduino Mega2560单片机将事先编好的程序输入到驱动板,使输出的脉冲信号驱动舵机实现运动。当双足气体平衡机器人与前面障碍物的距离小于阈值时,超声波测距传感器即反馈信号给计算机,计算机发出信号,使双足气体平衡机器人两足舵机差速转动,使双足气体平衡机器人转弯。
4 结束语
笔者设计的这种新型双足气体平衡机器人主要是由独特的角度解决目前轻型人形双足机器人的平衡问题,为双足机器人质心的控制提供了一种可行的方法。通过气体浮力平衡机器人的重力,使其保持平衡状态,即使暂时失去平衡还是可以通过气体浮力来恢复平衡。再通过质心移动驱使机器人行走。同时,通过轻巧精妙的机械设计,降低了双足机器人两腿控制的难度。总而言之,双足气体平衡机器人是应用气体浮力去解决人形机器人行走时候的平衡问题,具有深刻的研究意义,有很大的应用价值。
