一种新型的无人直升机便携式飞行控制器设计
2018-05-28刘丽君涂天佳
文/刘丽君 涂天佳
无人直升机系统主要由无人直升机平台、控制站、任务载荷、数据链组成。操作员使用布置在控制站内控制台上的按键、键盘等指令输入介质通过数据链实现对无人直升机平台和任务载荷的控制,并经通信链与战区部队、指挥官进行联络。控制站的形式和功能根据无人直升机的规模和任务的不同会有差异。飞行控制器作为无人直升机手动控制的实现是控制站的重要组成部分,主要用于大中型无人直升机的起飞着陆和试验试飞。国内目前较成熟的无人直升机也具备自动和手动两种控制方式,在手动模式下使用改进的航模控制器由操作手在目视无人直升机姿态的形式下进行控制。由于无人直升机系统属于“人在回路”的系统,因此研究如何改进人工控制对大中型无人直升机的飞行控制具有重要指导意义。
1 无人直升机操作特点
1.1 无人直升机操作方式
无人直升机的飞行阶段一般划分为地面检查阶段、远程超视距阶段和近场起降阶段。地面检查阶段进行无人直升机和地面站的飞行前的例行检查。远程超视距阶段是操作人员在地面操纵超出人眼视距范围内的无人直升机。他们将并排坐在地面控制站(GCS)内的两个几乎一样的控制台前,分别负责平台和任务载荷的操作,如图1所示。近场起降阶段执行无人直升机的起飞和降落,由站外操作手使用无人直升机飞行控制器配合站内操作员一起完成。在地面操纵无人直升机与在空中驾驶无人直升机是不完全一样的。飞行员空中驾驶直升机时通常使用操纵杆、脚蹬、油门、多功能显示器、开关、旋钮,手脚协作完成空中飞行。飞行员的视野开阔,并能直观切身的感受到直升机当前的飞行状态和姿态。操作员在地面驾驶无人直升机时通常使用控制台上布置的显示屏、手柄、鼠标、键盘、指令按键,主要通过手部的动作完成,不需要脚部执行机构。操作员不容易有飞行运动的感觉,看到的是机载光电吊舱拍摄下来的有限视角范围内的景象,感受到的是通过数据链下传的无人直升机的姿态参数。无人直升机的该种操作方式意味着地面操作人员需要尽可能多的获取机载传感器的遥测参数才能更全面的掌握平台和载荷的状态。
1.2 当前飞行控制器操作方式
目前站外操作手使用的飞行控制器是由航模控制器改装而成,主要用于近场起降阶段。控制器如图2所示,控制器的左杆横向进行尾桨距的控制,控制器的左杆纵向进行俯仰周期变距的控制,控制器的右杆横向进行横滚周期变距的控制,控制器的右杆纵向进行总距的控制。其中,除了总距不能回中以外,其它距量都可回中。
该控制器操作模式源自航模飞行,是一种双手持杆,在目视无人直升机姿态的条件下进行距量联动控制的精细飞行操作。根据试飞经验该操作模式存在控制模式单一、操作手无法实时获取遥测数据的不足。
据中国航空器拥有者及驾驶员协会(AOPA)统计,截止2015年11月1日,中国取得无人机驾驶员合格证的人数仅为1250人,随着无人机快速装备部队,军用无人机操作手面临短缺的局面,给部队的战备与训练带来了极大的困难。如何大规模培养高质量的无人机操作手,已成为各国军民双方的重要课题。如果依旧沿用该种控制器,不仅容易增加操作手的培养周期还由于其控制方式操作难度高,用户体验差,对操作手的经验以及心理承受能力均有较高的要求,在险情发生或者操作环境恶劣时,很容易误操作而造成无人直升机异常,因此对无人直升机人工控制的改进是当前亟需解决的问题。
2 系统设计
2.1 系统组成和工作模式
本文借鉴有人直升机驾驶成熟的“多功能显示屏+操纵杆”的操作方式并考虑到站外操作手的使用习惯,改用手柄作为操作杆,同时为保证站外操作手能实时获取无人直升机的状态参数,在飞行控制器中引入显控模块。因此新型飞行控制器由操作模块和显示模块组成,如图3所示。操作模块主要负责产生上行遥控指令,显示模块主要负责下行飞行遥测数据的显示。操作模块产生的遥控指令传给显示模块进行显示,同时上传给地面控制站经地面控制站组帧以后发送给无人直升机。
飞行控制器的工作模式分为目视遥控与超视距控制两种。在目视遥控模式下,操作手根据无人直升机的飞行状态,通过控制操作模块上的输入部件将操作数据通过显示模块内的处理单元发送到地面控制站,从而实现对无人直升机的飞行状态的调整。当无人直升机飞离操作手的视距范围时,根据任务需要,操作手可启动超视距控制模式,根据显示模块上实时显示的状态参数,通过操作模块控制无人直升机的飞行。

图1:火力侦察兵系统

图2:站外操作手使用的飞行控制器
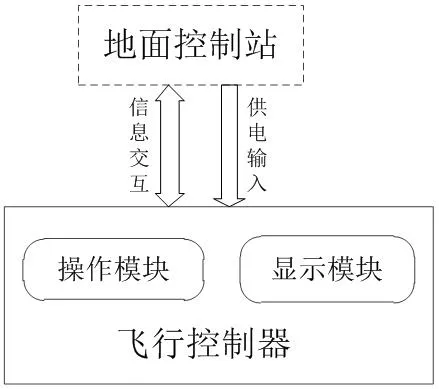
图3:飞行控制器组成
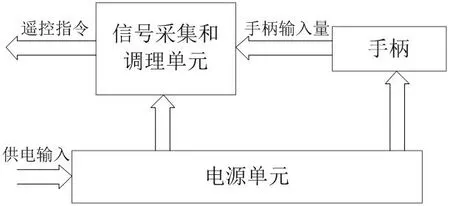
图4:操作模块组成

图5:手柄示意

图6:显示模块组成

图7:监视界面

图8:系统集成示意
2.2 操作模块
操作模块主要由电源单元、信号采集和调理单元、手柄构成,如图4所示。手柄上布置左、右按钮实现对无人直升机的航向通道的控制,从而执行悬停回转的飞行动作;布置推钮实现对无人直升机的高度通道的控制,从而执行爬升、下降的飞行动作;布置的拨轮用以在紧急状态控制航向;手柄自身具有前后左右两个自由度,用以实现对无人直升机的纵向、横向通道的控制,从而实现无人直升机前后左后四个方向的飞行。手柄示意如图5所示。手柄的操作部件以霍尔传感器和压电式力传感器为主,霍尔传感器是基于霍尔效应的一种传感器,具有结构简单、体积小、寿命长等优点,广泛应用与电磁、压力、加速度、振动等方面的测量。手柄内部集成的霍尔传感器主要用于检测拨轮和手柄自身产生的位移量。手柄顶部的推钮采用压电式力传感器。该传感器是基于某些物质的压电效应的一种传感器,具有体积小、重量轻、结构简单等优点。信号采集和调理单元将来自手柄的输入模拟信号进行调理和数字化,并将数字量解算为遥控指令,再通过串口传送给显示模块和地面控制站。电源单元为手柄和信号采集和调理单元提供工作所需电压。
2.3 显示模块
显示模块由电源单元、电池、处理单元、通信单元、显示单元、输入单元、存储单元组成,如图6所示。显示单元采用液晶显示器,通过LVDS接口与处理单元通信。通信单元采用RS422接口与操作模块通信,采用以太网接口与地面控制站通信。采用电池供电和地面站供电输入互补的供电方式。存储单元用以存储飞行数据。输入单元主要完成显示单元的亮度控制、显示界面切换、指令键切换,通过在显示单元周边布置按键实现。处理单元作为显示模块的核心部件,接收操作模块的RS422的串口数据、输入单元的按键数据、地面控制站的遥测数据,通过处理器对各种数据的运算和组帧等操作将数据传输至显示单元显示,供站外操作手使用。
显示模块的软件分为数据通信模块、数据处理模块、人机交互界面以及系统配置模块。数据通信模块主要处理飞行控制器与地面控制站的信息交互,包括地面控制站的遥测数据接收、地面控制站的视频数据接收、显示模块输入单元数据接收。数据处理模块主要实现地面控制站的遥测数据、视频数据、显示模块输入单元数据的处理。系统配置模块主要实现数据借口设置、系统属性设置。人际交互界面用以实现重要飞行遥测参数的实时显示,监视界面如图7所示。监视界面共划分为六个区域:飞行连续控制量显示区、指令回报和模式显示区、飞行仪表区、综合状态显示区、起降信息显示区、发动机状态显示区。飞行连续控制量显示区显示纵向周期变距、横向周期变距、总距、尾距、风门的当前值和输入值。指令回报和模式显示区显示飞行遥控的指令回报,如“飞行”和飞行控制器的当前控制模式,如“垂直起降”。飞行仪表区显示无人直升机当前的滚转角、俯仰角、无线电测量高度、超声波测量高度。综合状态显示区以指示灯的方式显示链路和手柄的当前工作状态。起降信息显示区用以显示当前无人直升机距离起降平台的位置。
2.4 系统集成
图8所示为系统集成示意图。飞行控制器整体采用背负式设计。操作模块和显示模块通过管式横杆组合在一起,显示模块通过云台固定在横杆上。通过云台的调整从而实现显示模块的俯仰和方位的微调。在实际使用中,操作手通过背带将控制器置于胸前,以站姿或者坐姿进行操作,手柄在其右侧,显示模块在左侧。
3 结束语
大中型无人直升机的试验试飞以及近场起降在一定程度上还无法完全摆脱人工操作的工作模式。在进行人工操作方式的设计时,既要将操作员的操作准确地输入给无人直升机以获得期望的响应,又要尽力规避人为的无意识的操作而给无人直升机飞行带来的风险。单手持杆辅以多功能显示屏的参数辅助显示的操作方式,可降低对操作员精细操作的要求,减弱传统的双手长时间同时握杆的操作方式引起的误操作,是降低设计风险的重要方法之一。
本文首先分析了无人直升机的操作特点,给出了原飞行控制器的操作方式,针对其存在的不足提出改进,设计出一套新型无人直升机便携式飞行控制器。该飞行控制器采用单兵前背负式方式,左侧布置显控设备,右侧为手柄,同时以手柄为主要输入单元,辅以按键,弥补了原控制器控制模式单一、无法显示遥测参数的不足。通过试验表明,该飞行控制器达到了预期的设计目的,能更好地适应当前无人直升机的操作特点,可有效增强无人直升机飞行安全并降低对操作人员的要求,可为大中型无人直升机的起降控制设计提供参考。
参考文献
[1]Michael Chanda,Danie Listion,Julee Diplacido,etc.Proposed Functional Architecture and Associated Benefits Analysis of a Common Ground Control Station for Unmanned Aircraft Systems[J].MONTERET,CALIFORNIA,NPSSE-10-002:28.
[2]郤文清,步鑫.基于人机工程学的无人机地面站人机接口设计[J].航空电子技术,2013(152):36-41.
[3]郁大照,刘书岩,高永,柳文林.美军解决无人机驾驶员短缺问题的举措及经验借鉴[J].无人机,2015(006):15-18.
[4]施斌.无人机操作手培养浅析[J].教练机,2012(03):89-92.
[5]张洪润,张亚凡.传感技术与应用教程[M].北京:清华大学出版社,2005:211-215.
[6]孙建民,杨清梅.传感器技术[M].北京:北京交通大学出版社,2005:150-174.
