车辆智能前大灯系统控制算法的仿真与优化
2018-05-26孙少杰朱布博蔺宏良
孙少杰,朱布博,蔺宏良
(陕西交通职业技术学院,陕西 西安 710018)
前言
车辆在夜间行驶时,智能前大灯系统可以根据弯道情况自动改变前大灯照明方向。减少弯道时的照明盲区,提高驾驶安全性。由于车灯的照射方向总是随着车辆行驶方向和行驶速度的变化而不断变化,并且车辆在行驶当中驾驶员行为存在不确定性、行车环境存在复杂性,从而导致了前大灯系统控制的复杂性。根据智能前大灯系统的随动特性和输入输出的非线性关系特点,本文选用模糊控制作为智能前大灯的控制算法。
1 基于模糊控制算法的智能前大灯系统仿真
利用Simulink建立智能前大灯系统的控制模型并进行仿真,之后对其控制效果进行分析评价。建立的智能前大灯模糊控制系统模型如图1所示:
将预先建好的模糊控制器读入到工作区,以完成整个仿真过程[1]-[2]。给该控制系统输入一个转角信号,将该信号与控制系统的反馈信号做差,将二者间的差值和差值变化率送入模糊控制器从而得到步进电机的输入脉冲数,经过步进电机的传递函数得到系统的输出角度值用该信号与控制系统的实际反馈信号做差,将得到的误差和误差变化率经模糊控制器计算得到步进电机的输入脉冲数,经过步进电机传递函数得到系统的角度输出值,将该角度值送入示波器与期望角度值进行对比,检验控制效果。
2 控制系统对动态输入信号的跟随效果
在行车过程中,前大灯的照射方向始终要随着行驶方向和行驶速度的变化而变化,故需要对前大灯系统的动态跟随效果进行分析。以幅值为9,周期为5的正弦信号为系统的输入信号进行仿真,得到系统的动态跟随效果曲线如图2所示:

图2 模糊控制系统动态跟随效果曲线图
由图2可以看出,控制系统的实际值一直在跟随期望值而变化,但在开始时,实际角度值与期望角度值之间的误差较大,之后二者之间的误差都较小,另外当期望角度值的变化率加快时,实际值与期望值之间的误差增大,当期望角度值的变化率减慢时,实际值与期望值之间的误差减小。在系统仿真过程中实际角度值与期望角度值之间的误差曲线如图3所示:
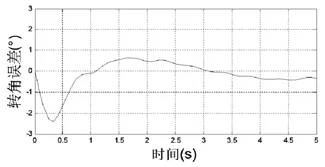
图3 模糊控制系统实际角度值与期望角度值之间的误差曲线图
由图3可以看出,在初始阶段实际角度值与期望角度值之间的误差较大,达到2.3°左右,但在系统稳定之后误差都控制在0.5°的范围内,误差较小,当期望角度值的变化率在0附近时,误差最小,几乎为零,此时的动态跟随效果最优。
3 智能前大灯系统控制算法的优化
通过仿真发现,基于模糊控制的智能前大灯系统虽然在稳定之后的实际值与期望值之间的误差较小,但在初始阶段二者之间的误差较大,初期控制效果不太理想,故需要对控制算法进行优化,为了提高控制精度,将稳定性强、控制精度高,控制算法简单、出错率低的PID控制算法与模糊控制相结合,使系统兼具应变性强和控制精度高的优点。建立模糊自适应PID控制系统的模型[3]-[5],如图4所示:
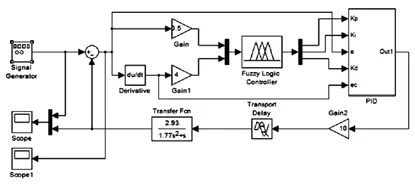
图4 模糊自适应PID控制系统模型
将周期为5,幅值为9的正弦信号作为期望角度值输入到该模型中,运行之后得到该控制系统的动态跟随效果曲线如图5所示:
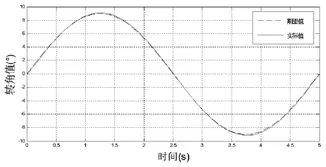
图5 模糊自适应PID控制系统动态跟随效果曲线图
从图5中可以看出,在整个周期内实际角度值与期望角度值之间的误差都非常小,动态跟随效果非常好。该控制系统的实际输出角度值与期望角度值之间的误差曲线如图6所示:
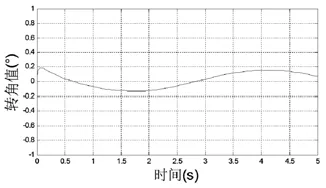
图6 模糊自适应PID控制系统实际角度值与期望角度值之间的误差曲线图
从图6可以看出,在整个周期内实际角度值与期望角度值之间的误差控制在[-0.2°,0.2°]之间。误差范围很窄,精度较高。
4 结语
本文根据智能前大灯系统的随动特点及驾驶员操作的不确定性,选用模糊控制作为智能前大灯系统的控制算法,并建立系统模型对控制效果进行仿真分析,经过仿真分析发现模糊控制系统在稳定之后的控制误差较小,控制效果较好,但在控制初期时的动态跟随误差较大, 控制效果不好。之后对控制系统的控制算法进行了优化,将模糊算法和PID算法相结合,建立模糊自适应PID控制系统模型,并对其进行仿真实验,由仿真结果可得控制系统的跟随误差始终控制在[-0.2°,0.2°]之间,控制效果良好,控制精度明显优于模糊算法,已经能够满足前大灯控制系统的精度要求,故将模糊自适应PID控制算法应用于智能前大灯控制系统是可行的。
参考文献
[1] 诸静.模糊控制原理与应用[M].北京:机械工业出版社,2005.
[2] 陈建林.基于驾驶模拟器的汽车 AFS系统控制策略研究[D].武汉理工大学,2009.
[3] 李健,王冬青,王丽美.模糊 PID 控制器设计及 MATLAB仿真[J].工业控制计算机,2011, 05:56-57.
[4] 杨菲,巴力登.基于MATLAB的模糊自适应PID控制器的设计与仿真[J].信息与电脑(理论版), 2011(09).
[5] 尹亮,宫文宁.模糊自适应 PID 控制算法分析[J].变频器世界,2011(09).
