浅谈智能驾驶中的环境感知*
2018-05-26王磊王严程海波赵伊齐
王磊,王严,程海波,赵伊齐
(华晨汽车工程研究院,辽宁 沈阳 110141)
前言
智能汽车是在传统汽车的基础之上将“智慧”和“能力”有机结合,它需要搭载先进的传感器、控制器、执行器等装置,并集中运用现代传感感知、自动控制、计算机、信息与通信和人工智能等先进技术。这些装置和技术使得智能驾驶汽车能够感知复杂环境、进行智能化决策、协同执行任务和共享互联网信息,甚至能够与公路及交通辅助设施组成一个智能交通系统[1,2]。
智能驾驶技术使得车辆可以模仿人类“感知-思考-判断-执行”的思维模式和行为能力,从而实现辅助人类驾驶甚至完全的车辆自主驾驶,该技术对提升车辆的舒适性和安全性、提高交通资源利用率、减少城市交通拥堵和促进节能减排有着重要的研究意义和实际工程应用价值。智能化发展是目前世界公认的汽车产业升级转型的关键方向,智能驾驶技术将是未来汽车技术的战略制高点[1]。
早在1939年,美国通用汽车公司第一次展出无人驾驶概念车Futurama[1],20世纪80年代后,欧美部分政府机构相继开展了智能驾驶汽车的研究计划。目前,在新一轮全球工业科技革命的推动下,各国的科研机构、高校和企业都掀起了智能车技术研究热潮。国内的清华、国防科技大学等高校,一汽、上汽等汽车集团公司都正在研究智能驾驶技术,同时蔚来汽车、小鹏汽车等互联网电动智能汽车公司如雨后春笋般萌发出来。
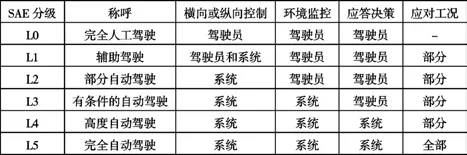
表1 汽车智能化水平分级
国际汽车工程师协会(SAE)将汽车智能化水平分为六个等级,如表所示。对以上六个等级的简洁描述如下:L0即完全依靠驾驶员操控的传统人工驾驶;L1系统可对转向和加减速中的一项操作提供驾驶支援;L2系统对转向和加减速中的多项操作提供驾驶支援;L3环境监控和所有驾驶操作均由系统完成,驾驶员只提供应答决策;L4驾驶员无需对所有的系统要求进行应答,但驾驶过程对道路和环境条件有所限制;L5系统可完成在所有道路和环境条件下的驾驶[5,11]0。
环境感知是研究汽车智能驾驶技术的基础,车辆通过传感器可以获得行驶路径、障碍物、交通标志等驾驶环境信息,进而才能进行决策规划和运行控制,因此环境感知在智能驾驶技术中起着至关重要的作用,是实现辅助驾驶及车辆完全自主驾驶的前提条件[3-5]。智能驾驶环境感知技术涉及的关键内容主要有三个方面:传感器,环境检测,定位导航,本文将对以上三个方面的内容进行一一介绍。
1 传感器
传感器是智能车辆进行感知的工具,目前三个国际大公司的无人驾驶汽车的传感器配置如表2所示,他们常用的环境传感器一般都包括激光雷达、毫米波雷达、摄像头和超声波传感器。

表2 无人驾驶汽车传感器配置
激光雷达利用旋转的反射镜将激光发射出去,通过测量发射光和反射光之间的时间差来测量距离,其中三维激光雷达的反射镜附有一定范围的俯仰运动,可获取物体的高精度三维信息,但是激光雷达容易受到雨雪雾的干扰,并且价格昂贵。目前主流的激光雷达的参数型号和报价如表3所示。
毫米波雷达是指发射波长为 1-10mm、工作频率在 30-300GHz频域的雷达,毫米波雷达利用多普勒原理,对动态目标检测效果好,不受恶劣天气的影响,对烟尘雨雾有良好的穿透传播特性。但是毫米波雷达通常视场较小,并且毫米波在大气中传播衰减较为严重。常见的毫米波雷达参数型号价格如表4所示。
摄像头主要用于车道线检测、识别障碍物及交通标志等。摄像头的成本低廉、技术相对比较成熟,但是受环境光线影响较大、难以准确获得三维信息等,这些问题也在探索当中,例如用红外摄像头来减少光线影响,用双目或三目摄像头获取三维信息。主流摄像头参数型号及报价如表5所示。

表3 激光雷达
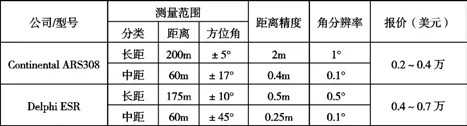
表4 毫米波雷达

表5 摄像头
超声波传是频率高于声波的机械波,在空气中传播时能量有较大衰减,因此超声波雷达主要用于近距离的对感知精度要求不高的障碍物检测。超声波传感器种类众多且价格低廉,通常一辆车上会安装多个超声波传感器,用于避免低速时的碰撞。
各种传感器都有自身的优缺点,为了更加准确的进行环境感知,避免受到气候环境影响,在实际应用通常使用多种传感器进行组合。
2 环境检测
智能驾驶汽车需要基于传感器检测路面信息及障碍物,并计算障碍物与车辆的相对距离[10]。智能车辆需要检测的目标及相应传感器如表6所示。

表6 检测目标及传感器
人类在驾驶过程中大多数环境信息来源于视觉,视觉系统视场宽且成本低,因此基于视觉的环境检测是智能驾驶检测技术的主要方向[12]。用于智能驾驶汽车目标检测的主要技术有背景差分、特征匹配和统计学习[7,13]0,其基本原理和特点如表7所示。
通常智能车辆与检测目标总是存在着相对运动,运动目标跟踪技术可以保证环境感知的实时性,目前跟踪技术主要有CamShift算法和基于Kalman滤波的跟踪方法,其基本原理及特点如表8所示。
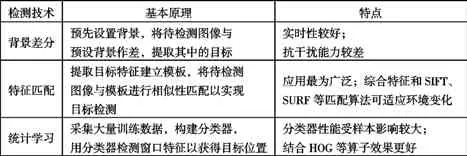
表7 主要目标检测技术

表8 主要目标跟踪方法

表9 四大全球卫星系统
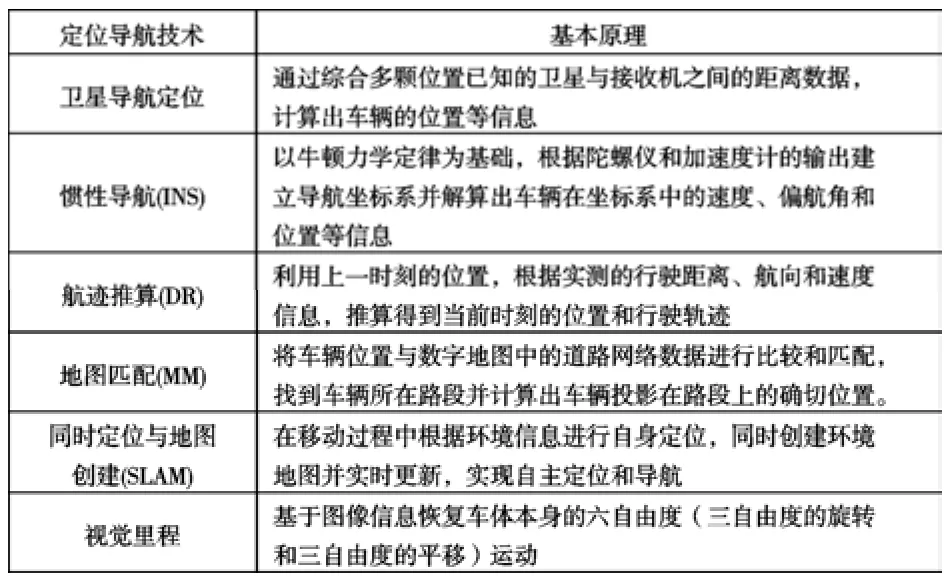
表10 主要定位导航技术
3 定位导航
智能驾驶汽车在行驶过程中不仅需要探测周围环境信息,还需要获得车辆与外界环境的相对位置关系并确定绝对位置,定位导航也是环境感知的关键技术之一[1,4]。
卫星系统在智能汽车的定位导航中占据着重要位置,目前主要有美国的 GPS、我国的北斗卫星系统、俄罗斯的GLONASS、欧盟的GALILEO四大全球卫星系统[14-17],其性能对比如表9所示。
目前应用最为广泛的卫星系统是GPS,它可以向全球用户提供连续、实时、高精度的三维位置、三维速度和时间信息,具有较高的定位和测速精度。但是在山区、隧道和高楼林立高架纵横的城市等环境中,GPS信号容易受到干扰,如果信号失锁,重捕后再次定位时间较长,严重影响车辆正常的定位与导航。其他卫星系统同样存在着自身问题,因此通常在卫星系统的基础上结合其他技术来提高定位导航的精度和保证系统的可靠性。目前常用的定位导航技术如表 10所示。
4 总结
智能车辆是一个非常复杂的综合体,环境感知系统的主要作用是为智能车辆的行为决策和路径规划提供准确可靠的信息源。随着智能驾驶技术的不断成熟,智能车辆将逐步应用于众多领域,例如在矿山和物流厂区运输货物、在工业园区运送员工通勤等等。京东、阿里等公司及汽车电商创业者们正在探索新的商业模式和场景应用,在不久的将来,智能汽车与商业的结合将给人们的消费习惯和行为方式带来翻天覆地的变化。研究智能驾驶汽车不仅会促进科学技术迅速发展、利于新兴行业的兴起,同时也为如何更加有效利用社会资源、缓解交通拥堵、降低能源消耗等亟待解决的社会问题提供了新的可能。对中国来说,发展智能汽车是一个火热的潮流,更是我国汽车产业发展的重大机遇,国家发改委将同有关方面正在制定针对智能汽车放面的政策和法规,加快促进我国智能汽车创新发展。
参考文献
[1] 中国人工智能系列白皮书——智能驾驶 2017[M].中国人工智能学会, 2017.
[2] 陆炳华,刘婷,张海滨.智能驾驶汽车传感器介绍及布置[J].上海汽车, 2017(11):40-43.
[3] Lundquist C.Sensor Fusion for Automotive Applications[J]. Linkö-ping Studies in Science & Technology Dissertation,2011.
[4] 马飞跃,王晓年.无人驾驶汽车环境感知与导航定位技术应用综述[J].汽车电器, 2015(2):1-5.
[5] Zhang X, Gao H, Guo M, et al. A study on key technologies of unmanned driving[J]. Caai Transactions on Intelligence Technology,2016, 1(1):4-13.
[6] Zeng S.Radar,lidar and camera enhanced methods for vehicle dyna-mics estimation: US,US8855848[P]. 2014.
[7] 刘亚伟,李小民.无人机航拍视频中目标检测和跟踪方法综述[J].飞航导弹, 2016(9):53-56.
[8] Sivaraman S, Trivedi M M. Machine Vision And Applications Doi 10.1007 S00138-011-0388-Y Special Issue Paper Active Learning For On-Road Vehicle Detection: A Comparative Study[J]. Machine Vision & Applications, 2014, 25(3):599-611.
[9] Zhou S, Gong J, Xiong G, et al. Road detection using support vector machine based on online learning and evaluation[C] Intelligent Vehicles Symposium. IEEE, 2010:256-261.
[10] 王俊.无人驾驶车辆环境感知系统关键技术研究[D].中国科学技术大学, 2016.
[11] 徐昕,贺汉根,蔡自兴,等.车辆智能驾驶技术的研究前沿与展望[C]2009中国自动化大会暨两化融合高峰会议.2009.
[12] 陈慧岩.无人驾驶汽车概论[M].北京理工大学出版社,2014.
[13] Zhu H, Yuen K V, Mihaylova L, et al. Overview of Environment Perception for Intelligent Vehicles[J]. IEEE Transactions on Intelli-gent Transportation Systems, 2017, PP(99):1-18.
[14] Daly P. Navstar GPS and GLONASS: Global satellite navigation systems[J]. Electronics & Communication Engineering Journal,1993, 5(6):349-357.
[15] 杨琰.北斗卫星导航系统与 GPS全球定位系统简要对比分析[J].无线互联科技,2013(4):114-114.
[16] Wang J, Yu X, Feng Z, et al. Global positioning system and dead reckoning (GPS&DR) integrated navigation system: US, EP2141 507[P].2012.
[17] 宁津生,姚宜斌,张小红.全球导航卫星系统发展综述[J].导航定位学报, 2013, 1(1):3-8.
