行程无障救护车
2018-05-25湖南省株洲市第二中学周康杰饶壤刘鑫灿
文 湖南省株洲市第二中学 周康杰 饶壤 刘鑫灿
行程无障救护车处于陆地行驶模式时使用油电混合动力系统,可根据不同的路况自动切换驾驶模式。当交通堵塞或遇到障碍时,行程无障救护车能自动识别并切换到飞行模式,由智能控制系统控制飞行姿态,确保其起飞、着陆都保持平稳。
行程无障救护车可以用于城市急诊人员抢救病人,避免因交通阻塞而延误抢救时间,也可用于军事和救灾抢险等场合,便于救援人员及时到达现场。
一、车体结构探究
根据流体力学的基本原理,大气施加于机翼下表面的压力(方向向上)比施加于机翼上表面的压力(方向向下)大,二者的压力差便形成升力。机翼受力分析见图1。
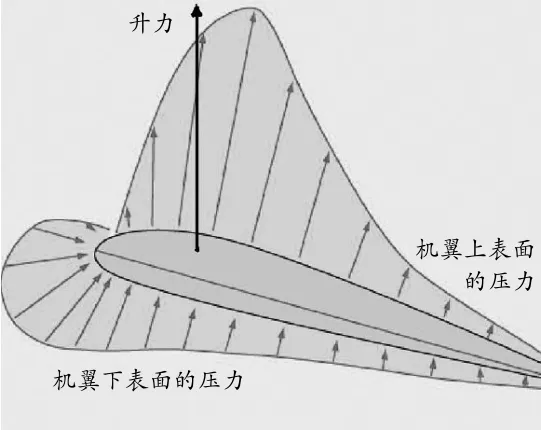
图1机翼受力分析
结合旋翼和桨叶的相对气流分析结论,当飞行器具有前飞速度时,旋翼受到的力和力矩包括构造旋转轴的升力 、阻力 、扭矩和侧向力矩 。上述力或力矩均与旋翼转速的平方成一定比例关系。

上面四个等式中, 为桨叶半径,=π2为桨盘面积, 为空气密度,、 、 、 分别为旋翼的拉力系数、阻力系数、扭矩系数和侧倾力矩系数。由此可见,求解旋翼的力或力矩关键在于各项空气动力学系数的求解。根据应用的需要,得出单片旋翼的升力=k2。常数k表示这片旋翼的升力系数,它与旋翼的形状、尺寸、安装方式以及飞行状态有关。由于涉及面过于复杂,在工程上把它看成近似于悬停状态,仍当作常量。
行程无障救护车车体结构采用自动折叠旋翼设计,车体材料采用碳纤维和高性能复合材料,四组空心杯型电动机组成动力来源。四旋翼飞行器通过四个螺旋桨产生的升力实现飞行,四个旋翼位于一个几何对称的十字支架的前、后、左、右四端。
旋翼由电机控制,整个飞行器依靠改变每个电机的转速实现飞行姿态控制。为便于控制,四旋翼飞行器采用对称分布的结构形式,机械结构简单,能垂直起降。
二、模拟行程无障救护车不同配置下的升力测试实验
我对行程无障救护车三种不同的配置进行了升力测试,探讨技术参数对升力的影响。
1.第一种配置:Q6SKV320电机+6S锂电池+T2255B螺旋桨。
2.第二种配置:Q9XLKV120电机+12S锂电池+T2880螺旋桨。
3.第三种配置:T12KV85电机+14S锂电池+T3895螺旋桨。
分析以上三种不同配置进行的升力测试实验数据得出,电流与拉力之间的关系几乎是线性正相关,电流与力效之间的关系几乎是线性负相关。模拟行程无障救护车的关键部件是电机、电池和螺旋桨,其中电机是核心部件。
三、行程无障救护车旋翼电机估算
在飞行状态时,从理论上讲,行程无障救护车的升力等于重力即可保持悬停;升力大于重力即可上升飞行。但对于多旋翼来说,升力除了保证飞机正常起飞外,还需要考虑行程无障救护车的前进后退、左右横滚,最关键的还有抗风性、安全性、操纵性等因素。
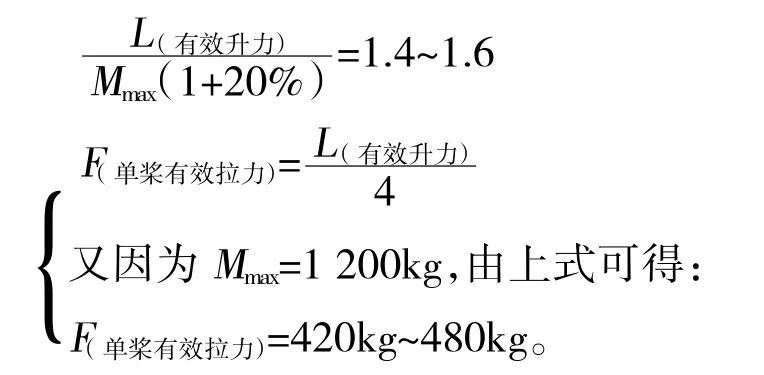
根据空气动力学原理及工程实践经验,行程无障救护车属于超载重旋翼飞行器,设计成四旋翼螺旋桨,四旋翼推重比应设计为1.4∶1~1.8∶1范围之内为合理,即应满足根据实际使用需求,超大载重机取1.4~1.6时,在微风环境下也可以正常使用。
通用比例螺旋桨拉力计算公式为(拉)(kg)=直径(m)×螺距(m)×浆宽度(m)×大气压力(1标准大气压)×经验系数(0.35)。
按已知车质量为1.0t计算。采用共轴反桨可以抵消螺旋桨转动所产生的扭矩,有利于减小飞机的偏航,但共轴反桨同时会损耗20%左右的升力,即四旋翼螺旋桨的有效升力大约为(有效升力)=(总)×80%,根据以上边界条件可得:
假设所设大载重旋翼在标准大气压下进行多次动力匹配,预设螺旋桨为70×40,最大桨宽0.2m。代入公式验算得到电机所需最高转速为11762rpm,悬停额定转速为7841.8rpm,功率74.34KW。所以,需选择大于80KW的电机(转换效率按0.95计算)。救护车质量为1.0t,螺旋桨为共轴反桨,尺寸为70×40,电机功率100KW,车载电源通过逆变器变为220V电压并支持大电流输出。
基于以上分析和论证,随着电机学、自动控制原理、空气动力学、新型材料学等多门学科的高速发展,行程无障救护车的研制和使用将成为现实。
