具有全向移动功能的多功能语音机器人设计
2018-05-24陈然,吴蓓
陈 然, 吴 蓓
(南京航空航天大学金城学院, 江苏 南京 211156)
引言
近年来,随着机器人技术、人工智能的不断发展,移动机器人的应用范围也不断扩大。随着需要机器代替人工作业的场合越来越多,当前市面上同一款机器人所能应用的场合非常有限,且在多种狭窄的区域范围内,需要改变机轮方向来改变自身运动方向的机器人往往无法工作。因而,具有全向移动功能的麦克纳姆轮在近年来得到广泛运用。此外,随着社会进步、科技发展以及我国社会人口老龄化的问题日益严重,以键盘式输入对机器人进行控制的操作方式已无法满足人类需求的同时,人们也越来越关注以后的养老问题。因此,具有语音交互功能的多功能机器人将拥有更广阔的市场。
1 硬件设计
具有全向移动功能的多功能语音机器人的硬件实物图如下页图1所示。
基于STM32F103RCT的嵌入式平台连接语音交互芯片、六轴惯性传感器、红外光电传感器、超声波测距模块、可燃气体传感器、温湿度传感器、人体红外感应传感器、粉尘传感器、火焰检测模块、GSM模块、驱动模块以及电源模块。其将采集到的信息进行解算,建立出坐标系进行自主定位,根据语音交互模块接收到的语音命令到达某一地点,对该地点或沿途的环境信息进行采集并汇报,若检测到障碍则自行避开。
1.1 全向移动
全向移动基于机器人底部的四个麦克纳姆轮,其安装方式为O-长方形,如下页图2所示。采用带有霍尔编码器的直流减速电机对麦克纳姆轮进行控制。机器人能够依靠各机轮的方向和速度,在不改变机轮自身方向的情况下进行全方位移动[1-2]。通过逆运动学模型得出四个轮子速度的计算公式,机器人通过获取霍尔编码器的电气角相位差,解算出实际转速,并选用PID控制器对轮子的转速进行控制。电机的转速通过控制芯片输出PWM信号进行控制。
1.2 电源模块
本文设计的稳压电路能够满足各个芯片或模块的工作需求,其主要是对11.1 V、2 200 mA的锂电池进行电压调节。11.1 V直接为电机驱动提供工作电压。通过基于TPS5430芯片的BUCK开关电源拓扑,将11.1 V降至5 V,给语音交互模块、环境检测模块和5.8G WIFI图传模块供电。再通过AMS1117芯片将5 V线性稳压到3.3 V,为STM32芯片、光电传感器、超声波测距模块和霍尔编码器供电,并为电机驱动提供逻辑电压。
1.3 STM32F103RCT芯片
主控制器选用STM32F103RCT芯片,其具有48KB SRAM、256 KB FLASH、2个基本定时器、4个通用定时器、2个高级定时器、3个SPI、2个I2C、5个串口、1个 USB、1个 CAM、3个 12位 ADC、1个12位DAC、1个SDIO接口和51个通用I/O口。
1.4 自主定位避障模块
自主定位采用ICM-20602六轴惯性传感器,控制芯片通过滤波与姿态解算得到机器人的航向角、速度、加速度等信息,建立一个二维坐标系,从而进行自主定位,并通过SPI通信总线和STM32F103RCT芯片进行通信[3]。
自主避障采用两个红外光电管和两个超声波测距模块协调进行障碍检测。采用集发射与接收于一体的E18-D80NK红外光电传感器,检测机器人前后特定距离内是否有障碍或墙体。发射光经过调制后发出,接收头对反射光进行解调输出,能够有效的避免可见光的干扰。采用HC-SR04超声波传感器,测量机器人两侧距离障碍或墙体的距离,实现对机器人周围障碍的检测,并结合机器人相应的动作,完成自主避障的功能。超声波传感器采用IO口TRIG触发测距,给最少10μs的高电平信号。模块自动发送8个40 kHz的方波,自动检测是否有信号返回;有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。为了提高机器人的自主定位及避障效果,设计过程中采用龙格-库塔算法对误差进行抑制,该算法采用Taylor公式进行展开,其解具有较好的光滑性。
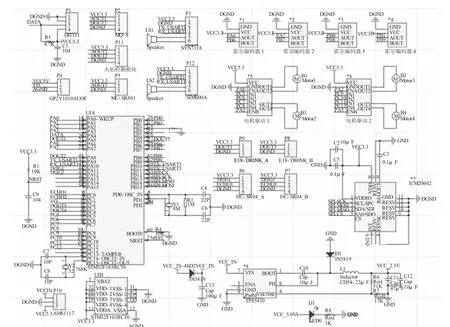
图1 硬件实物图

图2 O-长方形安装方式
1.5 语音交互模块
SYN7318中文语音交互模块集成了语音识别、语音合成和语音唤醒功能模块,通过UART接口通讯方式接收命令帧,实现文本到语音、语音到文本的转换以及语音唤醒功能。模块内部还集成了MP3音频文件的播放功能,可以使用命令帧控制MP3音频文件的播放、暂停、恢复及停止动作[4-5]。
1.6 环境检测及报警模块
1)可燃气体传感器采用MQ-5。MQ-5所使用的气敏材料是在清洁空气中电导率较低的二氧化锡(SnO2)。当传感器所处环境中存在可燃气体时,传感器的电导率随空气中可燃气体浓度的增加而增大。STM32F103RCT芯片通过自带ADC读取传感器输出的模拟信号,对可燃气体浓度进行判断。
2)温湿度传感器采用DHT-11,具有校准数字信号输出的功能。其精度为:(RH)湿度±5%,温度±2℃,量程湿度(RH)20%~90%,温度范围0~50℃。该传感器通过单线制串行接口与控制芯片相连接。
3)人体红外感应传感器采用HC-SR501。人体发射的10 μm左右的红外线通过菲泥尔滤光片增强后聚集到红外感应源上。红外感应源通常采用热释电元件,在接收到人体红外辐射温度发生变化时会失去电荷平衡,向外释放电荷,后续电路经检测处理后能够产生报警信号。控制芯片通过检测数字信号判断报警信号。
4)粉尘传感器采用GP2Y1010AUOF。装置中具有红外发光二极管和光电晶体管,采用对角布置,能够检测到空气中的灰尘反射光。该传感器具有较低的电流消耗,输出的是一个模拟电压,其正比于所检测得的粉尘浓度。控制芯片通过自带ADC读取传感器输出的模拟信号,对粉尘浓度进行判断。
5)火焰检测传感器。通过红外接收传感器可以检测火焰或者波长在760~1 100 nm范围内的光源,以模拟量电压输出。控制芯片通过自带ADC读取传感器输出的模拟信号,对是否有明火进行判断。
6)GSM模块采用SIM900A。控制芯片与SIM9 00A通过串口通信,实现短信的收发和语音通信。
2 系统软件设计
机器人启动后,对系统各功能模块进行初始化,然后将六轴惯性传感器获取的数据进行滤波并建立坐标系。进入语音接收循环后,解析语音信息并生成相应控制指令。具体指令操作流程如图3流程图所示。
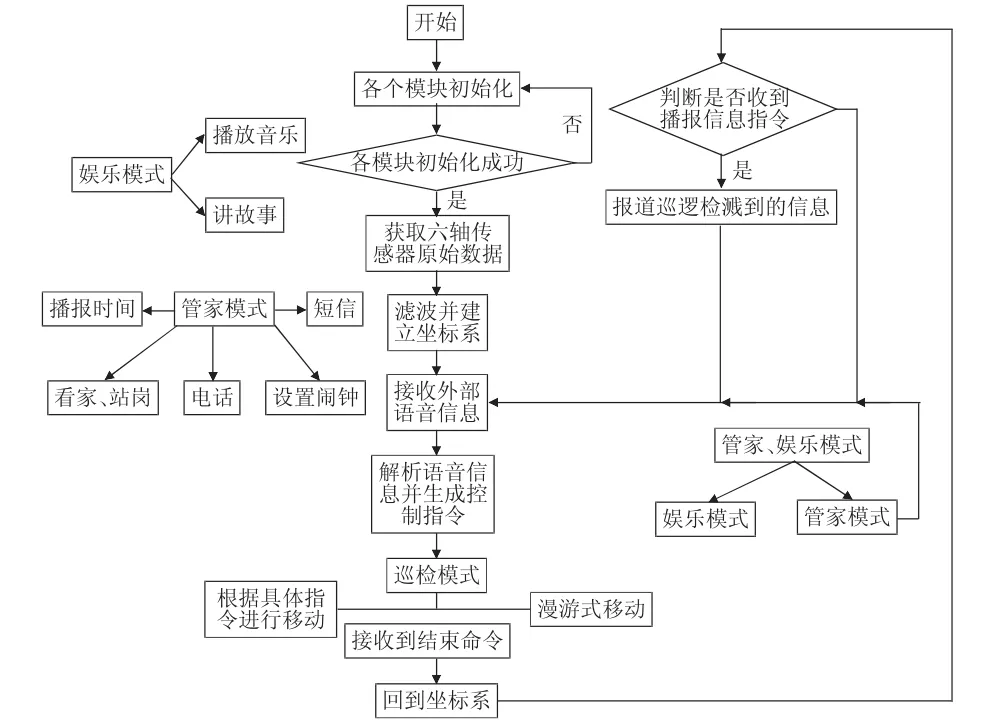
图3 系统软件流程图
3 实物展示
根据如上分析及设计,制作硬件实物图如图4所示。该机器人能够在不改变机轮自身方向的情况下、在狭小的环境范围内,实现全方位移动,能够自主定位与避障,可与用户进行语音交互,可根据用户的语音命令执行相应任务,能检测环境内温湿度状况、PM2.5浓度、是否有可燃气体泄漏、是否有非法人员入侵、是否有明火,并在发现险情时发送报警信息。在机器人执行任务时,用户可以通过5.8G图传模块在手机上查看机器人周围实时影像。同时,为充分发挥所搭载的各个芯片、传感器、模块的功能,还附带有播报时间、设置闹钟、看门站岗、短信、电话、播放音乐、讲故事等多种功能。

图4 硬件实物图
4 结论
本文以STM32F103RCT6嵌入式平台为核心,以麦克纳姆轮为移动基础,结合电源模块、定位避障模块、语音交互模块等设计了一款多功能机器人,实现了全向移动、自主定位、自主避障、语音交互、检测环境和一系列娱乐、管家功能。本文所设计的系统电路结构简单,成本低廉,功能多样,可操作性高,稳定性高,具有较高的可拓展性。
参考文献
[1] 丁明华,李允旺,王勇.基于Unity3d的麦克纳姆轮移动平台避障算法仿真[J].中国科技论文,2016(10):1 191-1 195.
[2] 莫然,张进,高淑芝.基于麦克纳姆轮的全向移动自主机器人[J].山东工业技术,2017(8):223.
[3] 傅忠云,朱海霞,孙金秋,等.基于惯性传感器MPU6050的滤波算法研究[J].压电与声光,2015(5):821-825.
[4] 余皓,苏全.语音控制机器人的设计与实现[J].电气自动化,2007(5):29-31.
[5] 周立辉,张永生,孙勇,等.智能变电站巡检机器人研制及应用[J].电力系统自动化,2011(19):85-88.