一种小型AUV组合导航方法
2018-05-24周振华
周振华
中国船舶重工集团公司第七一五研究所 浙江杭州 310023
自主式水下航行器(Autonomus Underwater Vehicle,AUV)作为一种执行水下侦察、勘探、攻防等重要任务的平台,在海洋开发日益重要的现在,越来越得到各国的重视[1-2]。
AUV受自身结构空间的限制,携带能源有限[3-4]。因此,采用低成本、小体积、少功耗等诸多突出优点的微型惯性测量 单 元(Micro-Electronic Mechanical SystemInertial MeasurementUnit,MEMS-IMU),如 IMU720G、SBG、MTi等,有利于AUV的小型化、产品化[5][6]。
针对小型化的AUV,本文提出一种MEMS-IMU/DVL/深度传感器/GPS组合导航应用方法,该方法可有效的解算出AUV姿态、速度、位置等信息,同时AUV在水面航行时可对位置误差进行修正。
1 系统解算原理
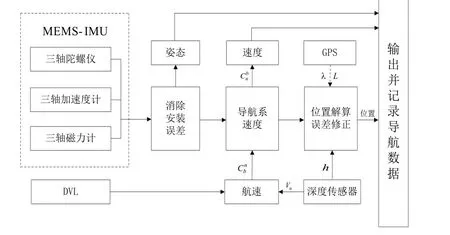
图1 系统解算原理图
本文提出的组合导航系统解算原理如图1所示,根据MEMSIMU输出的姿态信息经误差修正后即可得载体姿态信息;由当前DVL输出信息可得到载体前进和侧向速度,并根据深度传感器的变化获取AUV竖直方向的速度;将AUV航速转换到导航坐标系下并积分可得到位置信息,当AUV在水面时,利用获取GPS信息对位置误差进行修正。
2 导航解算
2.1 坐标系定义
选取东-北-天坐标系为导航坐标系(n系),载体右-前-上为载体坐标系(b系)。AUV绕X、Y、Z轴转动分别对应载体的俯仰、横滚、航向的变化,载体姿态角均为零时,即载体系与导航系重合。
2.2 姿态解算
AUV姿态可由MEMS-IMU输出的姿态信息获取,考虑到MEMSIMU安装到AUV平台时存在安装误差,因此MEMS-IMU输出的姿态信息需要消除安装误差。
2.3 速度解算
AUV安装的DVL可输出载体前向-测向速度,AUV深度信息可由深度传感器测得,因此根据AUV航行过程中深度的变化h(t),计算出导航系下载体天向速度Vu为:

2.4 位置解算
AUV在地球上的位置可用经度、纬度、深度来表示,深度由深度传感器测得,因此只需对AUV的经度、纬度进行解算,即可确定AUV的空间位置信息。
将AUV速度在导航系下的投影进行积分为:

其中,λ0、L0分别为载体在t 0时刻的经度和纬度;λ˙0、L˙0分别为t 0到tk时间段内载体在经度和纬度的变化率,可由运动速度计算得:

式中,RM、RN分别表示地球的子午圈、卯酉圈曲率半径;h为载体深度,Ve、Vn分别为载体在导航系下东向和北向的速度投影。
将式(2)、式(3)整理得:

设VN为载体在导航系下的速度投影,则

式中,Vu为导航系下载体天向速度,、、分别为载体系下载体右-前-上方向速度,Cbn为载体系到导航系的转换阵,且:

其中,θ、γ、φ分别为载体的俯仰角、横滚角、航向角。
由式(4)、式(5)、式(6)可解算出载体的经度、纬度。当AUV在水面时,利用GPS信息对纬度误差和经度误差进行修正,并继续以修正后的经纬度进行位置推算。
3 误差分析
3.1 姿态误差
AUV的姿态误差主要由MEMS-IMU器件量测误差及其安装误差引起。其中,器件量测误差为器件自身特性,随着技术水平的提高,器件量测误差会越来越小;器件安装误差是由安装环境、安装精度等因素引起,可通过标校、补偿等方法减小安装误差对姿态的影响。
3.2 速度误差
AUV的速度误差主要由DVL输出误差、安装误差等引起,DVL输出误差大小取决于器件的测速精度,安装误差可通过软件补偿等方法以减小安装误差对测速精度的影响。
3.3 位置误差
AUV位置误差是姿态误差和速度误差引起的。在导航系下,高度通道经深度传感器阻尼,其深度值和深度变化率精度较高,因此定位误差主要是精度误差和纬度误差。
(1)姿态误差引起的定位误差。设MEMS-IMU器件误差引起的载体航向误差为Δφa,安装误差引起的载体安装误差为Δφb,载体航程为D,则此状态下引起的定位误差为:

(2)速度误差引起的定位误差。设DVL输出速度误差为Vn,其它因素引起的速度误差为Vm,载体航行速度为V,则速度误差引起的定位误差为:

由式(8)、式(9),载体定位误差为:

4 仿真分析
4.1 仿真条件设置
(2)设MEMS-IMU器件水平姿态RMS误差为0.2°,方位RMS误差为0.5°,深度传感器误差为0.1m,在水面时GPS定位误差为10m,AUV速度误差为0.1m/s,航速8节,AUV在水下运动轨迹如图3所示,航程共3.6km,姿态误差、速度误差、位置误差分别如图4、图5、图6所示。
4.2 仿真结果与分析
根据图2可知,在器件安装误差一定时,航速越大定位误差越小。

图2 不同航速时系统定位误差
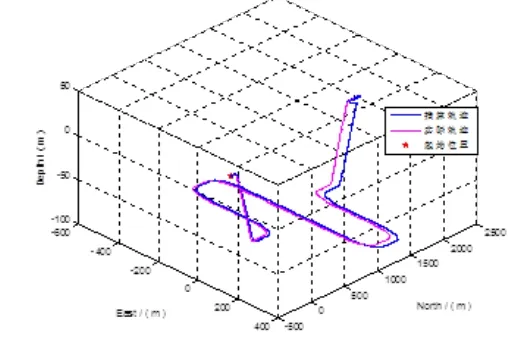
图3 AUV水下运动轨迹
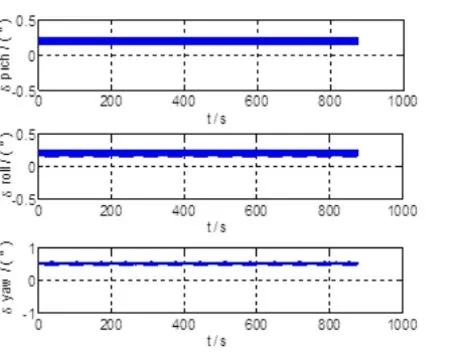
图4 AUV姿态误差
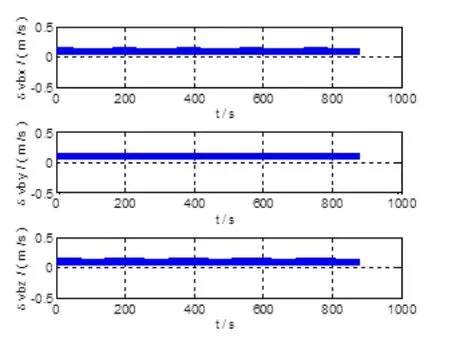
图5 AUV速度误差
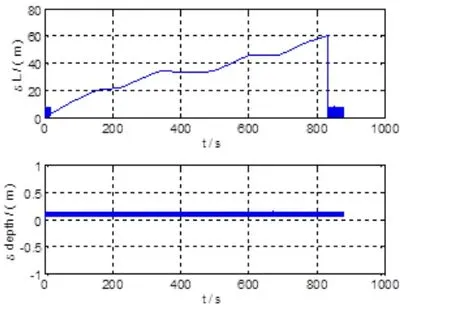
图6 AUV位置误差
根据图4、图5、图6可知,AUV在水下航行过程中,载体姿态误差和速度误差均可收敛至一定的误差范围,位置误差随着时间的推移逐渐增大;在831s时,AUV航行至水面,GPS可接收到位置信息进行误差修正,此时,载体的姿态、速度、位置误差均收敛至较小的误差范围。
5 结语
本文提出的MEMS-IMU/DVL/深度传感器/GPS的组合导航方法可有效的解算出AUV的姿态、速度、位置等信息。对于导航精度要求较高的环境,可通过AUV定期上浮进行位置误差修正以提高系统导航定位的精度。
