基于末端轨迹修正的导弹跟踪稳定性控制方法
2018-05-23鞠晓东郑振
鞠晓东 郑振

摘 要: 舰载导弹在制导飞行的末端容易受到空气小扰动的影响产生轨迹偏离,需要进行轨迹偏离修正控制,提高弹道对目标跟踪的姿态稳定性,提出一种基于改进的扩展Kalman滤波(EKR)和误差反馈修正的导弹跟踪端轨迹修正控制方法。以陀螺仪采集的导弹的横滚角、俯仰角以及航向偏离的参量为控制约束指標集,采用扩展Kalman滤波算法进行姿态参量融合,结合Smith结构建立导弹跟踪控制的被控对象模型,计算末端轨迹中姿态角与真值的偏差,根据偏差进行导弹的惯性姿态反馈调节,采用自适应的量化融合跟踪识别方法进行导弹定姿处理,通过对末端轨迹的误差反馈修正提高姿态角的输出精度,根据姿态的不断变化实现自适应的位姿修正,实现导弹对敌目标跟踪的稳定性控制。仿真结果表明,采用该方法进行导弹控制的姿态角解算的误差较小,定姿精度较高,提高导弹跟踪控制的稳定性和鲁棒性。
关键词: 导弹;控制;末端轨迹修正;姿态参量;反馈调节
Abstract:The trajectory deviation of shipborne missile is easy to be caused by small air disturbance at the end of the guided flight so the trajectory deviation correction control is required to improve the attitude stability of trajectory tracking to the target. A trajectory correction control method for missile tracking end based on improved extended Kalman filter and error feedback correction is proposed. The parameters such as roll angle pitch angle and course deviation of the missile collected by gyroscope are taken as the control constraint index set. An extended Kalman filtering algorithm is used to fuse the attitude parameters. The controlled object model of missile tracking control is established with the Smith structure. The deviation between the attitude angle and the true value in the terminal trajectory is calculated and the inertial attitude feedback is adjusted according to the deviation. An adaptive quantization fusion tracking method is used for missile attitude determination. The output accuracy of the attitude angle is improved by error feedback correction of the terminal trajectory and the adaptive attitude correction is realized according to the constant change of the attitude. The simulation results show that the error of attitude angle solution of missile control is small and the precision of attitude determination is higher which improves the stability and robustness of missile tracking control.
Key words: missile;control;terminal trajectory correction;attitude parameter;feedback adjustment
引言
舰载导弹作为水面舰艇的主要攻击武器,在对舰攻击和对空攻击中发挥着重要作用,导弹具有自主导航控制和对敌目标精准打击的能力[1]。随着探测制导技术的发展,研究精确制导的舰载导弹成为未来导弹发展的一个主要方向,舰载导弹在对敌目标跟踪和攻击过程中,受到空气扰动以及姿态颤抖等因素的影响,在末端轨迹中容易出现飞行偏离,影响攻击的精度,需要对末端轨迹段进行稳态修正和控制,提高导弹的导引控制精度,从而提高导弹跟踪的稳定控制能力[2]。
在导弹的飞行偏航控制设计中,最关键的技术是构建导弹动力平衡数学控制模型,导弹的飞行轨迹偏航误差和轨迹跟踪误差来自外部扰动和模型误差,通过对误差修正和反调节实现导弹的精确控制,传统方法中,对导弹的末端轨迹偏离修正控制方法主要有线性倒立摆模型(linear inverted pendulum model LIPM)控制方法、模糊PID控制方法以及滑模积分控制方法等[3],结合对导弹的偏航姿态误差,进行偏航控制修正,提高导弹飞行的稳定性,取得了一定的成果,其中,文献[4]中提出一种基于反演镇定函数积分控制的导弹滑翔飞行控制方法,根据导弹的偏航执行器的驱动力参数进行导引控制,提高导弹的攻击抗干扰能力,但该方法容易受到飞行末端轨迹的小扰动干扰,出现稳态误差;文献[5]中提出一种基于线性自抗扰偏航静态抗饱和补偿的导弹控制方法,采用俯仰力矩、滚转力矩以及偏航执行器的驱动力等参数为约束指标,构建导弹偏航控制对象模型,实现导弹的自适应反馈跟踪控制,提高了导弹导引的精度,但该方法在进行末端轨迹跟踪控制中容易受到静态抗饱和因素的作用,导致飞行偏离,导引精度不好。
针对上述问题,本文提出一种基于导弹位姿参量的扩展Kalman滤波量化融合(EKR)识别和误差反馈修正的导弹跟踪端轨迹修正控制方法。首先进行控制约束参量分析,以陀螺仪采集的导弹的横滚角、俯仰角以及航向偏离的参量为控制约束指标集,结合Smith结构建立导弹跟踪控制的被控对象模型。然后进行控制律的优化设计,计算末端轨跡中姿态角与真值的偏差,根据偏差进行导弹的惯性姿态反馈调节,采用自适应的量化融合跟踪识别方法进行导弹定姿处理,根据姿态的不断变化实现自适应的位姿修正,实现控制律改进设计。最后进行仿真实验分析,展示了本文方法在提高导弹偏航控制性能方面的优越性。
1 控制约束参量分析和控制对象描述
1.1]导弹末端轨迹偏航控制约束参量与动力学模型构建
为了实现对导弹的末端轨迹偏航控制,需要首先构建导弹偏航导引跟踪控制的约束参量分析模型,采用连续补偿方法进行控制参量的自适应调整,并通过控制执行器进行导弹飞行控制姿态参量调整,以陀螺仪采集的导弹的横滚角、俯仰角以及航向偏离的参量为控制约束指标[6],构建导弹末端轨迹修正的三通道模型可表示为:
由此构建舰载导弹偏航控制约束参量模型与动力学模型,在此基础上进行舰载导弹控制对象描述。
1.2 被控对象描述
根据导弹的姿态运动机理,进行舰载导弹的控制对象模型分析,建立偏航控制器结构模型,Smith结构建立导弹跟踪控制的被控对象模型如图1所示。
图1所示的导弹跟踪控制模型为一个时滞耦合系统 当存在扰动不确定项时 Gm(s)=G0(s) tm=τ, 导弹末端轨迹修正的飞行跟踪控制的传递函数模型为:
将陀螺仪采集的导弹跟踪参数输入到系统动态方程中,采用多传感器信息融合方法,得到导弹末端轨迹修正的四元素矩阵为:
上式中 导弹末端轨迹调整的惯性姿态参数直接从Gm(s)的输出端引入,采用Kalman融合滤波方法进行控制参量的自镇定性调整[9],提高导弹的姿态参数的修正能力和偏航控制能力。
2 导弹的跟踪稳定性控制律优化
2.1 末端轨迹修正及导弹的惯性姿态反馈调节
在上述进行导弹跟踪控制的约束参量分析和被控对象模型研究的基础上,进行导弹末端轨迹跟踪的控制律优化设计。本文提出一种基于导弹位姿参量的量化融合识别和误差反馈修正的导弹跟踪端轨迹修正控制方法,根据偏差进行导弹的惯性姿态反馈调节,在小扰动项e-tms的影响下,得到末端轨迹修正的闭环传递函数与测量系统参数的关系式为:
2.2 控制律优化设计及稳定性分析
设计自适应的姿态参量调整算法,进行导弹末端轨迹修正控制,在Terminal滑模面上对舰载导弹的姿态模型参数进行模板匹配[10],采用定姿控制算法,进行模糊导引控制,得到控制器输出层的权重值为:
3 仿真实验与性能分析
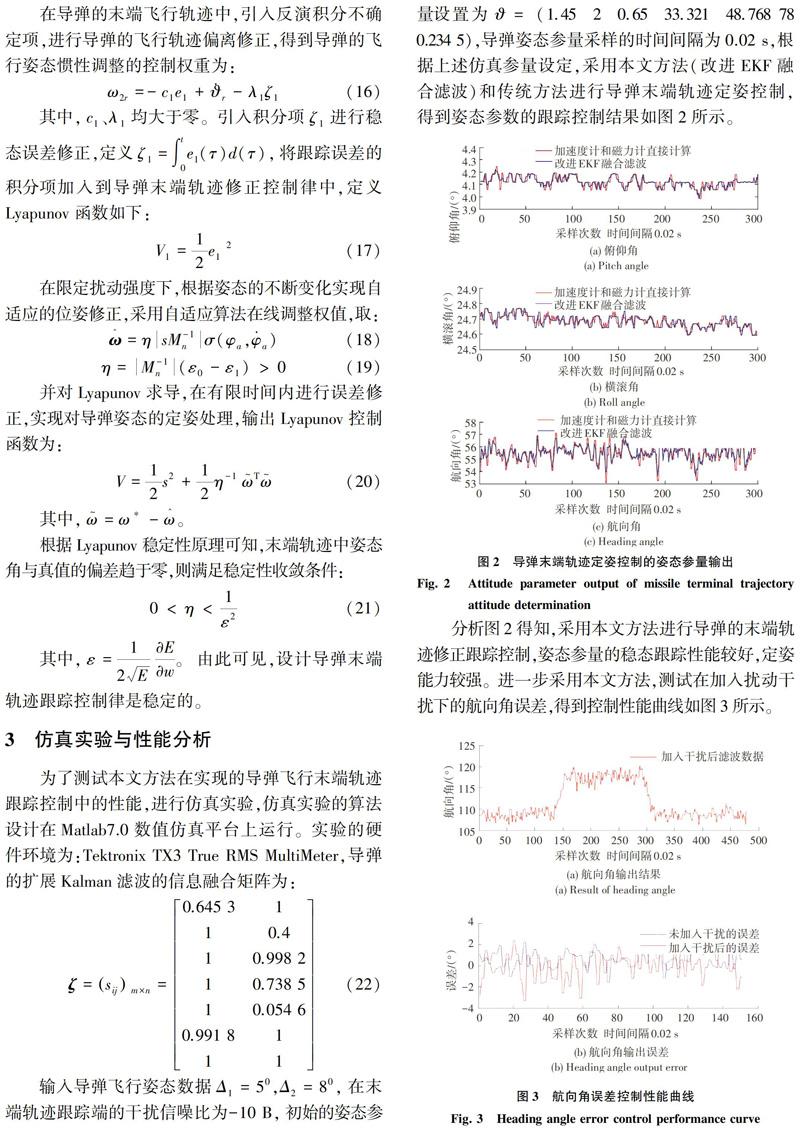
为了测试本文方法在实现的导弹飞行末端轨迹跟踪控制中的性能,进行仿真实验,仿真实验的算法设计在Matlab7.0数值仿真平台上运行。实验的硬件环境为:Tektronix TX3 True RMS MultiMeter,导弹的扩展Kalman滤波的信息融合矩阵为:
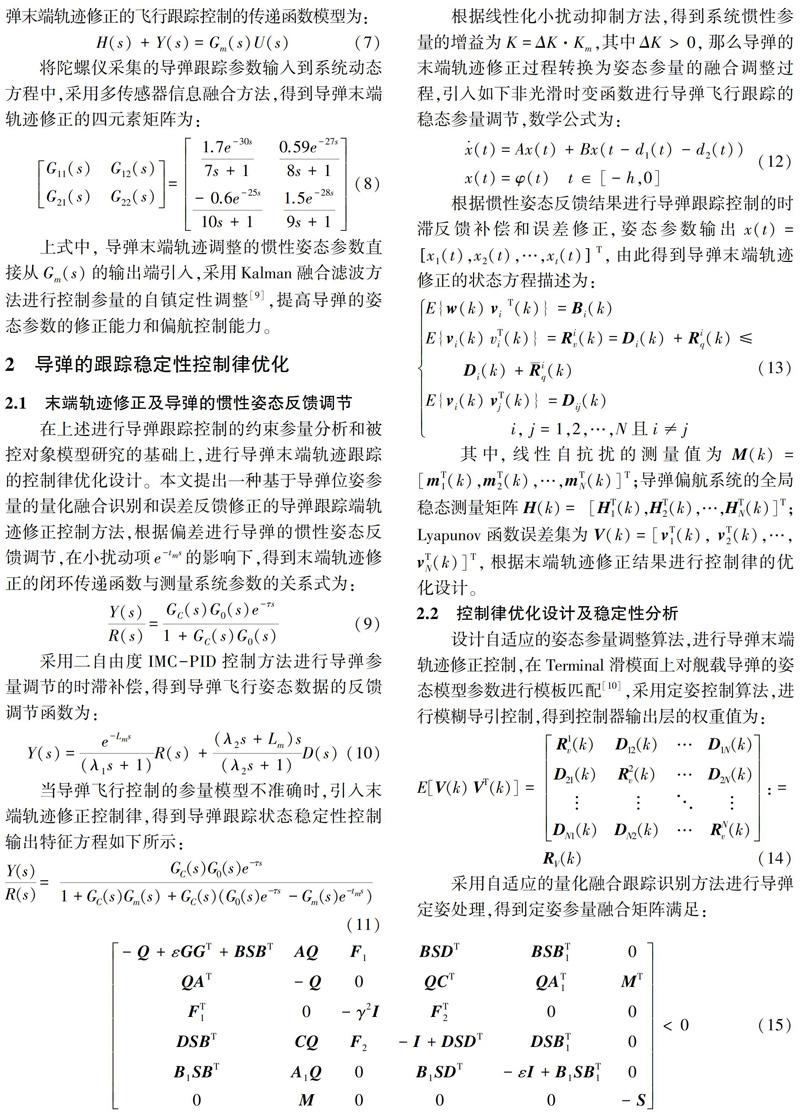
分析图2得知,采用本文方法进行导弹的末端轨迹修正跟踪控制,姿态参量的稳态跟踪性能较好,定姿能力较强。进一步采用本文方法,测试在加入扰动干扰下的航向角误差,得到控制性能曲线如图3所示。
分析图3得知,采用本文方法进行导弹跟踪控制,航向角误差能稳态收敛到零,有效实现了对末端轨迹的偏离修正,提高导弹的稳态跟踪控制能力。
4 结束语
舰载导弹在对敌目标跟踪和攻击过程中,受到空气扰动以及姿态颤抖等因素的影响,在末端轨迹中容易出现飞行偏离,影响攻击的精度,需要对末端轨迹段进行稳态修正和控制,本文提出一种基于导弹位姿参量的扩展Kalman滤波量化融合识别和误差反馈修正的导弹跟踪端轨迹修正控制方法,以陀螺仪采集的导弹的横滚角、俯仰角以及航向偏离的参量为控制目标对象,进行控制律的优化设计,计算末端轨迹中姿态角与真值的偏差,根据偏差进行导弹的惯性姿态反馈调节,采用自适应的量化融合跟踪识别方法进行导弹定姿处理,根据姿态的不断变化实现自适应的位姿修正,实现控制律改进设计。研究得知,本文方法能提高导弹的末端轨迹偏离修正能力,实现导弹稳定性控制,控制过程的鲁棒性较好。
参考文献
[1] 徐为民 徐攀. 不确定扰动下双起升桥吊双吊具鲁棒自适应滑模同步协调控制[J]. 控制与决策 2016 31(7): 1192-1198.
[2] 赵石磊 郭红 刘宇鹏. 基于轨迹跟踪的线性时滞系统容错控制[J]. 信息与控制 2015,44(4): 469-473.
[3] 葛立志. 基于全弹道控制分析的水下航行器攻击模型视景仿真[J]. 舰船电子工程,2015,35(3):137-141.
[4] OFODILE N A TURNER M C. Antiwindup design for inputcoupled double integrator systems with application to quadrotor UAV's[J]. European Journal of Control 2017 38: 22-31.
[5] CHIRANJEEVI T VIJETHA I V V CHAKRAVARTHI B N CH V et al. Tuning and control of multivariable systems[J]. International Journal of Electronics and Electrical Engineering 2014 2(4): 309-320.
[6] 刘炜 陆兴华. 飞行失衡条件下的无人机惯导鲁棒性控制研究[J]. 计算机与数字工程 2016,44(12): 2380-2385.
[7] 彭程,白越,乔冠宇,等. 四旋翼无人机的偏航抗饱和与多模式 PID 控制 [J]. 机器人,2015,37(4):415-423.
[9] 彭艳,刘梅,罗均,等. 无人旋翼机线性自抗扰航向控制 [J]. 仪器仪表学报,2013,34(8):1894-1900.
[10]彭程 白越 乔冠宇. 共轴八旋翼无人飞行器的偏航静态抗饱和补偿控制[J]. 机器人 2018 40(2): 240-248.
[11]周勇,甘新年,胡光波,等. 鱼雷制导控制系统多通道控制加权算法设计[J]. 现代电子技术,2014,37(19):14-17.
