富钴结壳采矿车微地形行走技术的研究现状*
2018-05-23吴鸿云侯井宝徐俊杰李江明
刘 伟,吴鸿云,江 敏,侯井宝,徐俊杰,李江明
(长沙矿山研究院有限责任公司, 湖南 长沙 410012)
富钴结壳是一种极具开发价值的深海矿产资源。自20世纪80年代开始,国际上开始了海底富钴结壳矿产资源的勘探、开采和冶炼等方面的技术研究,比较有代表性的方案主要有日本提出的拖曳式采矿机,美国提出的自行式采矿机,俄罗斯专家提出的绞车牵引式采矿车等,由于海底环境的复杂性,开采难度较大,目前仍然处于方案研究阶段[1]。
1 富钴结壳微地形及其行驶要求
富钴结壳微地形特性对采矿车的行走以及富钴结壳的破碎和采集有很大的影响。结壳矿床的微地形按矿床赋存特征来分可以概括为6大类[2-4],包括熔岩流带型、复合带型、卵石带型、沉积物带型、结核带型、大片结壳层型。其中以大片结壳层型最具有开采价值,通常大面积(可达数十平方千米)附着在海山山坡上,地形坡度约为7°~15°,地形起伏约为5~10 cm,基底层为玄武岩、变质玄武岩、玻璃质碎屑岩、火山碎屑岩等。钴结壳的形态也比较多样化,大致呈板状、砾状和钴结核状3大类。
我国在2013年取得西太平洋富钴结壳矿区的专属勘探权,面积为3000 km2。以西太平洋富钴结壳矿区的采薇海山为例,利用多波束测深和回波强度分析得到的结果如图1所示。可以看出海山山顶为钙质远洋沉积物区,因此呈现出软底质。斜坡区域通常为富钴结壳发育区或者裸露的基岩,因而呈现出硬底质或者中等硬底质,中等硬度底质通常附有少量远洋钙质沉积[5]。利用深海浅钻对该区域的岩芯取样结果表明,在海山平顶边缘地带的基岩主要由碎屑岩、玄武岩、硅酸岩、磷块岩等组成,其中以碎屑岩为主,且碎屑岩上生长的结壳平均厚度最大[6]。图2是36航次调查的海底摄像图片,其结壳发育区中分布有大面积板状结壳和砾状结壳。

图1 西太平洋结壳矿区底质分布
国内外对富钴结壳及其基岩的物理特性进行了一系列研究,但由于取样地点、取样方法以及试验方法各不相同,不同的研究机构最终得到的数据之间相差较大。通过比对国内外的测试数据[7-11]得到表1,可以看出富钴结壳的抗压强度一般都在5~10 MPa之间,基岩的抗压强度通常在20~60 MPa之间。

图2 结壳区域微地形摄像
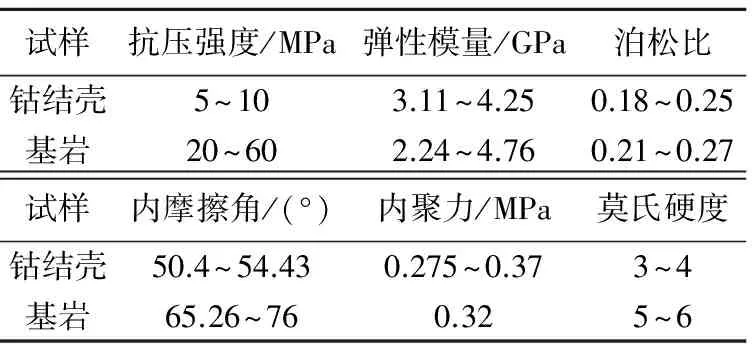
试样抗压强度/MPa弹性模量/GPa泊松比钴结壳5~103.11~4.250.18~0.25基岩20~602.24~4.760.21~0.27试样内摩擦角/(°)内聚力/MPa莫氏硬度钴结壳50.4~54.430.275~0.373~4基岩65.26~760.325~6
通过对矿区的勘探和钴结壳力学特性相关分析,对富钴结壳可采区域地形行走提出如下要求:行走速度约为0.1~0.8 m/s;爬坡能力大于15°;越过台阶高度大于200 mm。
2 国外深海复杂地形采矿车的研究
1995年,美国在“国际海洋工程及其环境”会议上提出了自行式钴结壳采矿车的设计方案,推荐的方案模型见图3,配有8条三角形行走履带,多履带的布置结构将利于改善采矿车整体接地情况,提升微地形的适应能力。行驶速度0.2 m/s、作业功率900 kW、长13 m、宽8 m、高6 m、空气中重100 t。采矿车一共装备有6个切割头破碎钴结壳,切割头的工作高度利用机械臂的上下移动来调节[13],以适应微地形的起伏,减少对基岩的切割。水力吸矿器布置在切割头的后部,用于将破碎后的钴结壳吸入储存仓,经过重新破碎和分选之后,由扬矿管提升至缓冲仓。这种设计方案对于本文课题的研究具有很好的借鉴意义,即通过多履带、多采矿头的设计来解决富钴结壳采矿车的地形适应难题,是一种简单可靠且行之有效的办法。
深海多金属硫化物是另外一种海底矿产资源,其矿区地形相对于富钴结壳地形更加复杂和多变,因此硫化物采矿车的行走技术对富钴结壳采矿车行走具有一定的借鉴意义。
日本石油、天然气和金属国家公司(JOGMEC)、三菱重工等于2012年在冲绳县附近海域开展了海底多金属硫化物开采试验,试验取得25 kg的硫化物。试验用采矿车长7 m,宽3.2 m,高3.5 m,工作水深2000 m,水下重量16 t,功率为184 kW。其行走部分采用了4条履带,并且4条履带均为独立悬挂和独立驱动,能够实现采矿车高度和姿态的调节[14],履带采用了大接近角和离去角的结构来提高其越障能力,但履带本身与地面的附着面积较小。

图3 美国提出的富钴结壳采矿机器人
3 国内深海复杂地形采矿车的研究
国内的部分相关高校和科研院所对车辆在海底的行走技术进行过一系列研究。中南大学设计了一款铰接履带式采矿机器人,实验室模拟样机如图4所示。样机由前履带车、后履带车和中间铰接机构组成,采用三自由度铰接机构使前后履带车之间产生纵向俯仰、横向侧翻和水平转向相对运动,以提高复杂地形的通过能力[15]。其越障铰接机构及其工作原理图如图5所示,当模拟样机越过垂直障碍时,锁死油缸3,对油缸2施加运动控制来调整前后履带的姿态;当样机越沟时,将俯仰油缸2和转向油缸3锁死,前后车体变为一个整体;当样机爬坡时,将俯仰油缸2设置为自由状态,锁死其他油缸;当样机转向时,可以通过对油缸3施加运动,实现前后履带之间的偏转,能够减小转向半径。这种方案具有很好的地形适应性和通过性,但也对控制性能提出了很高的要求。

图4 铰接履带式采矿车行走模型样机

图5 铰接机构运动简图
北京科技大学曾提出过行星轮式行走机构[16]、复合轮式行走机构[17]等针对海底复杂地形的行走方案,行星轮式行走机构的传动简图如图6所示:图6(a)为总体传动布置,图7(b)为行星轮机构传动总图。行走机构由前后2个驱动桥和4组行星轮系组成,每个行星轮系有3个驱动轮。在平地时,任意2个车轮着地,驱动轮系相当于定轴轮系。当障碍高度大于驱动轮能越过的极限高度时,驱动轮系演变为行星轮系,行星轮架和驱动轮一起绕行星轮系的中心转动翻越障碍,行星轮系越障形式的切换不需要辅助机构来控制,虽然行星轮式行走机构采用了被动适应的越障形式,对控制要求不高,但行星轮作翻转运动的瞬间其驱动轮的扭矩和承载力以及整个采矿车的速度都会急剧变化,一旦车重较大,越障瞬间的冲击力就会很大,影响采矿车可靠性。复合轮式采矿车的模型样机如图7所示,采矿车由4套复合轮组和铰接式罐式车架组成,行走时,复合轮组的前、中、后轮在油缸的伸缩作用下,实现空间结构的变化,从而使整个机构具备主、被动混合越障模式,由于海底压力巨大,轮式行走机构在海底行走需要解决承压问题。
长沙矿山研究院有限责任公司设计了一款步履式采矿车样机,如图8所示,采用两对液压支腿交替着地,机身和平移架在牵引油缸作用下相互推进,完成步履前进,底盘和机身机架采用回转支呈连接,由液压马达驱动回转机构转动。原理样机包括机身、平移架、回转机构、底盘、支腿、牵引油缸和液压站等。该原理样机的外形尺寸约为1.9 m×1.7 m×1.8 m,机重2 t,功率为4 kW,可原地回转±90°,越障高度约为0.4 m。此外,长沙矿山研究院有限责任公司还主持研发了四履带式行走底盘样机(见图9)[18],样机底盘采用4个三角履带行走装置,三角履带轮由4个同等排量的液压马达独立驱动,通过调节左侧、右侧马达的转速实现直行和转向。三角履带轮能够围绕各自的驱动轮前后摆动,从而实现地形的适应,越障高度约为0.25 m。
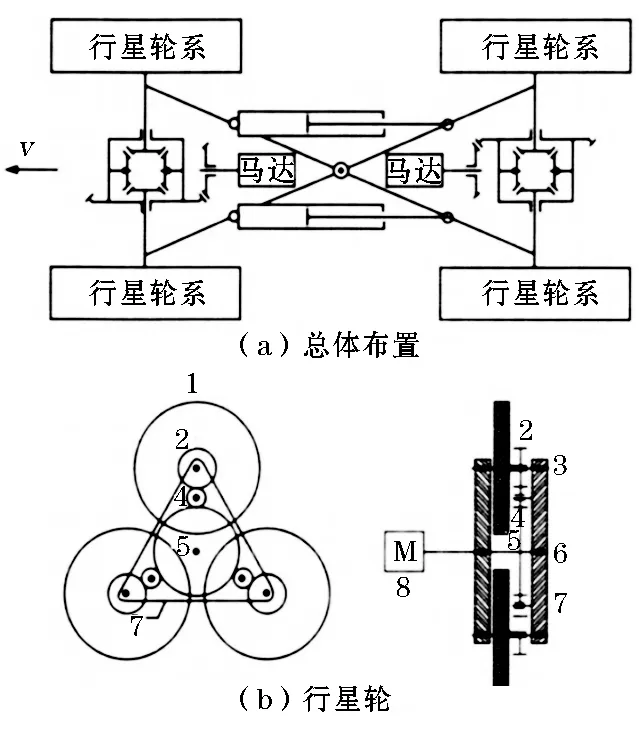
图6 行星轮式采矿车传动模型

图7 复合轮式采矿车模型样机

图8 步履式采矿车样机

图9 四履带式采矿车样机
4 结论与展望
经过20多年的发展,我国在富钴结壳地形行走
技术方面进行了大量的基础研究,有了长足的发展,设计并研制了多种适应于富钴结壳地形的采矿车原理样机,但目前这些采矿车仍处于原理验证性实验阶段,没有开展富钴结壳矿区试验。富钴结壳采矿车的微地形适应难题亟待解决。未来对于富钴结壳采矿车的设计主要注重于以下技术的提升:
(1) 由于富钴结壳地形的复杂性,采矿车必须具备全地形行驶能力,对爬坡、越障、越沟的要求比常规地面全地形车辆更高。
(2) 由于富钴结壳生长于海底,如果单纯采用人工远程控制会出现延迟,因此富钴结壳采矿车的自动化程度必须足够高,需具备路径规划和控制能力。
(3) 行走装置和采集装置的自适应地形技术。由于富钴结壳矿区微地形比较复杂,结壳厚度不均匀,行走装置如果不能适应地形,俯仰太过剧烈,会严重影响采集装置的采集效率,与此同时采集装置与矿区地面的相互作用力又会反过来影响行驶装置的稳定性。二者之间的联动和协调是设计的难点。
参考文献:
[1]陈新明,吴鸿云,丁六怀,等.富钴结壳开采技术研究现状[J].矿业研究与开发,2008,28(6):1-3,19.
[2]梁 平,石海林,崔波,等.洋底富钴结壳矿床微地形和物理特性[J].金属矿山,2002(9):15-17.
[3]J Latimer,R Kaufrnan. Preliminary considerations for the design of cobalt crust mining systems in the U. S. EEZ[R].Oceans(New York),1985:78-399.
[4]Yamazki,T. Sharma,R. Tsurusaki,K. Microtopographic analysis of cobalt rich manganese deposits on a Mid-Pacific Seamount[J]. Marine Georesources &Geotechnology,1994,2(1):33-52.
[5]杨 永,何高文,杨胜雄,等.采薇平顶海山群底质类型分布研究[J].矿物学报,2015(S1):801-802.
[6]韦振权.西太平洋采薇海山群基岩特征及其富钴结壳成矿意义,矿物学报,2015(S1):792-793.
[7]Chung.Jin S. Deep-ocean mining:Technologies for manganese nodules and crusts[J]. International Journal of Offshore and Polar Engineering,1996,6(4).
[8]周知进,卜英勇.海底富钴结壳物理特性的试验研究[J].地球物理学进展,2008,23(5):1456-1459.
[9]吴鸿云,高宇清,陈 争.富钴结壳抗剪强度试验研究[J].采矿技术,2013,13(6):35-36,84.
[10]卜英勇,邱长军.深海钴结壳和基岩抗压强度的分布特性和频率设计[J].岩石力学和工程学报,2002,21(S2):2326-2330.
[11]梁 平,石海林,崔 波,等.洋底富钴结壳矿床微地形和物理特性[J].金属矿山,2002(9):15-17.
[12]戴 瑜,刘少军.深海采矿机器人研究:现状与发展[J].机器人,2013,35(3):363-375.
[13]何清华,李爱强,邹湘伏.大洋富钴结壳调查进展及开采技术[J].金属矿山,2005(5):4-7.
[14]Shinji Ishiguro,Yoshiaki Yamauchi. Development of mining element engineering test machine for operating in seafloor hydrothermal deposits[J].三菱重工技报,2013,50(2):37-42.
[15]周 良.铰接式履带车动力学仿真与有限元分析[D].长沙:中南大学,2009.
[16]陈轶辉,李洪星.深海行星轮式采矿车液压驱动系统建模分析[J].机械设计与制造,2016(7):252-256.
[17]姜 勇,深海复合轮式采矿机器人越障性能研究[J].机器人,2012,34(2):137-143.
[18]刘 伟,吴鸿云,江 敏,等.海底自行式四履带车的差速转向性能研究[J].矿业研究与开发,2017,37(11):81-85.
