近岛礁浮式平台水动力及运动响应特性研究
2018-05-23凌宏杰王志东
凌宏杰,王志东,丁 军,吴 波
(1.江苏科技大学 船舶与海洋工程学院, 镇江 212003) (2.中国船舶科学研究所, 无锡 214082)
海洋中蕴含丰富的油气资源和渔业资源,开发和利用海洋包括岛礁资源已经成为经济与技术发展方向.环绕岛礁延伸数百米至数千米水深均为较浅的礁盘,礁盘位置不仅具有丰富的渔业和旅游资源,而且具有消波护岛、防止海水侵蚀岛体本身等作用.应用可移动式浮式平台作为近岛礁的基地,具有不会对岛礁生态环境、礁盘和海岛陆地形态产生影响的优点,同时为海洋及岛礁的建设与资源开发提供后勤基地,具备灵活、机动等特点.
对于海洋浮式平台水动力性能,国内外在该领域开展了大量的研究工作.文献[1]中开展了风浪联合作用下多体浮式结构物时域的数值模拟与分析,给出了平台时域中运动响应与分析.文献[2]中开展了深水(1 500 m)半潜式平台水动力性能研究,采用频域计算方法,给出了平台运动响应结果并与模型试验结果进行对比分析.文献[3]中采用时域耦合分析方法,研究了Truss Spar 平台的耦合动力特性问题.文献[4]中基于AQWA软件和水池模型试验开展了近岛礁悬链线系泊模式下半潜式平台的水动力性能的相关研究,取得了对近岛礁平台设计具有指导意义的成果.文献[5]中对新型半潜平台开展数值计算分析并与常规型半潜平台对比分析研究.文献[6]中针对GVA4000 半潜平台进行数值计算,数值结果与试验结果对比吻合良好.文献[7]中在时域和频域中对浮式平台进行分析,重点研究平台的一阶和二阶波浪力激励下平台的运动.文献[8]中基于AQWA软件研究了复杂的海洋环境载荷,包括随机波浪载荷、风载荷和流载荷的多重作用,浮式平台与系泊缆索之间的相互影响,采用时域耦合的分析方法对深海领域复杂工况下的半潜式钻井平台的水动力性能和系泊性能进行了分析.文献[9]中基于三维时域格林函数理论,提出了采用时域物面非线性理论方法直接模拟系泊浮体时域耦合分析所需的水动力,建立了系泊浮体波浪中时域耦合运动的数学模型,系统研究了系泊Spar平台波浪中的耦合运动响应及系泊线张力.文献[10]中利用AQWA软件对目标平台进行频域下的水动力分析,得到平台的运动响应数据;最后.根据规范设计了一种新型半潜式平台的锚泊系统,对平台与锚泊系统进行时域耦合分析,为目标平台的控制提供精确预报.文献[11]中基于AQWA软件研究了水动力系数变化特征并进行了运动响应预报,同时进行了模型试验,验证利用频域分析方法进行数值模拟的可行性.
国内外学者采用的研究对象主要集中于深水条件下的海洋平台,在浅水及近岛礁条件下的平台水动力分析方面的研究论文则极少.文中基于势流软件AWQA与模型试验方法对岛礁地形下浮式平台的水动力性能与运动响应开展研究工作,采用新型“水鼓式系泊”方案,浮式平台不规则波中的运动响应考虑了船舶停靠状态属于多体耦合问题(上述文献中均未开展此类研究工作),对比分析了深水与浅水状态浮式平台的水动力特性,定量分析了岛礁地形对浮式平台水动力及运动响应的影响;数值计算结果通过了模型试验验证,可为浅水条件下浮式平台的水动力性能研究和系泊系统的设计提供参考.
1 计算模型
1.1 浮式平台参数
浮式平台示意见图1.浮式平台为方箱型,两端略收缩,两端各设两个锚机用于拉紧锚泊系统;平台靠海一侧设有两组带缆桩用于停靠船舶系泊,靠岸一侧设有坡道与浮驳连接,实现与岸相连.模型试验时考虑平台的风浪流联合作用下的运动响应,对浮式平台甲板上方的生活楼、吊机、锚机等设备进行了模拟.坐标系满足右手系,浮式平台的主尺度参数见表1.

图1 浮式平台示意Fig.1 Model of floating platform表1 浮式平台的主尺度参数Table 1 Main dimensions of floating platform

长/m宽/m高/m吃水(距基线)/(m)排水量/t重心位置/m1002562.76494.8(0,0,4.30)
1.2 岛礁地形模型
基于岛礁实地地形的测量数据,模型试验三维地形断面坐标见表2.综合考虑计算效率和网格单元数的限制等因素,水动力计算中选取了实际地形的其中一块矩形区域200 m×150 m(平台系泊所处位置),完全浸没于水面以下.地形周围的海底深度为30 m,而地形高度随着水平位置的变化而变化,平台中心点处的水深约为16 m.
在近岛礁海域,波浪传播速度随着水深变浅而减小,浪向垂直于礁盘岸线,波形由正弦波转化为坦谷波,峰谷值不对称,对平台的运动响应及受力状态有较大影响,因此研究受到近岛礁地形影响下浮式平台的运动响应有着重要的意义.图2为岛礁三维地形计算模型,图3为浮式平台的坐标系(满足右手系).

表2 三维地形断面坐标Table 2 Profile coordinate of 3D terrain mm

图2 岛礁三维地形计算模型Fig.2 3D terrain model of island reef
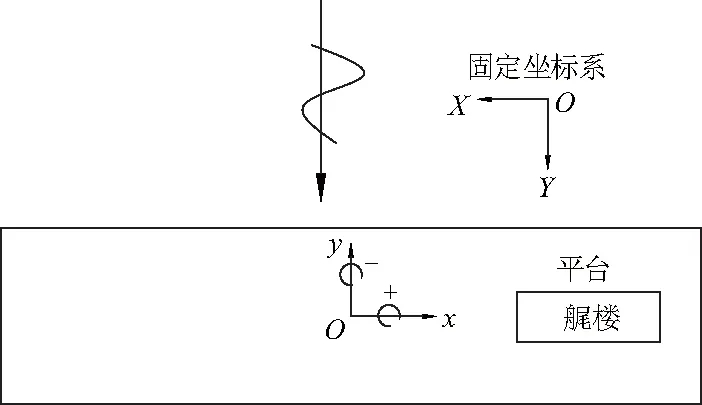
图3 浮式平台坐标系Fig.3 Coordinate system of floating platform
1.3 系泊系统
系泊系统设计依据首先是满足平台安全作业和生存的需求,同时最大限度地提高平台在运行中的方便性、可靠性和经济性.浮式平台采用混合(水鼓)式系泊系统方案,即在低海况作业状态下采用艏艉双水鼓平行岸线系泊方式,便于船舶靠帮作业.在高海况下解脱艉部水鼓形成仅系泊于艏部水鼓的单点系泊以利用风标效应减小环境力提高抗风流能力.图4为系泊系统的布置方案及试验中系泊缆张力的测点分布.其中平台系泊缆预张力为100 t,船舶靠帮系缆的预张力10 t.
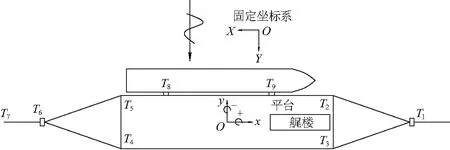
图4 系泊系统测点布置Fig.4 Layout of mooring system measuring point
数值计算在频域中模拟1 m 波高的规则波,浪向为135°,作为对比,无岛礁地形下的平台计算水深为30 m,而考虑岛礁地形的入射波水深为30 m,在平台布放处的水深为16 m,数值计算与模型试验一致,条件见表3.
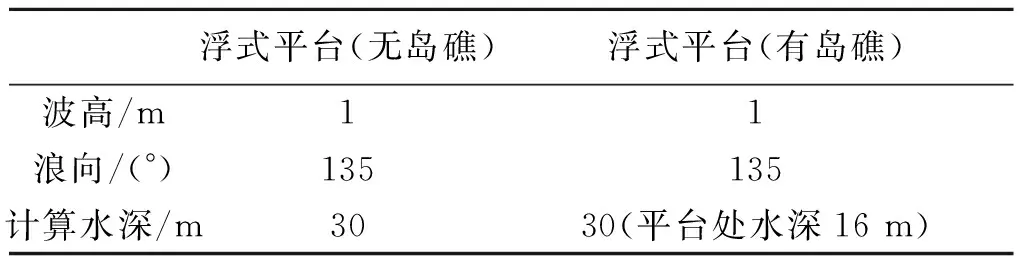
表3 规则波条件Table 3 Regular wave conditions
模型试验模拟有船舶靠帮和无船舶靠帮在典型海况下浮式平台的运动响应和系泊张力,数值计算与模型试验一致,相关的环境条件见表4.

表4 不规则波条件Table 4 Irregular wave conditions
2 水动力性能分析
2.1 岛礁地形对平台运动响应影响分析
图5~10为有岛礁地形和无岛礁地形时浮式平台运动响应的对比结果.图中圆点的拟合曲线为无岛礁地形条件下浮式平台运动响应幅值算子RAO的变化规律,图中三角点的拟合曲线为有岛礁地形下浮式平台RAO变化规律.横坐标为入射波浪周期T,纵荡、横荡、垂荡、横摇、纵摇和艏摇的RAO分别为1 m波高下浮式在该方向的位移和转动角度.为了充分体现6个自由度的RAO,文中给出的入射波角度为135°,该浪向角下平台在6个自由度都有较大的量值.
当入射波周期小于12 s时,除艏摇外,浮式平台RAO值整体变化规律相似,有岛礁地形普遍小于无岛礁地形情况;入射波波长小于有效地形长度,岛礁地形对入射波的反射作用,削弱了入射波能量,因此出现浮式平台RAO有岛礁地形小于无岛礁地形.由于三维岛礁地形存在,改变了入射波传播方向(垂直于岛礁的坡岸),增大了平台的转艏力矩,艏摇角度增大.
当入射波周期大于12 s时,除垂荡运动外,其他5个自由度浮式平台RAO值有岛礁地形普遍大于无岛礁地形情况,原因为:① 入射波波长大于有效地形长度,平台的绕射效应增强,衰减弱,由于岛礁地形存在对流体的挤压作用,平台运动更加剧烈;② 入射波为正弦波,传播至平台位置处发展为坦谷波(波浪随地形断面演变的试验测试曲线见图11),对平台的抬升能力减弱,因此近岛礁平台垂荡运动小于深水情况,H为波高,h为地形高度,x为沿地形剖面的长度.

图5 平台纵荡运动响应RAOFig.5 Surge response RAO of platform

图6 平台横荡运动响应RAOFig.6 Swag response RAO of platform

图7 平台垂荡运动响应RAOFig.7 Heave response RAO of platform

图8 平台横摇运动响应RAOFig.8 Roll response RAO of platform

图9 平台纵摇运动响应RAOFig.9 Pitch response RAO of platform

图10 平台艏摇运动响应RAOFig.10 Yaw response RAO of platform

图11 波浪沿地形断面演变Fig.11 Evolution of the wave along the topography
2.2 浮式平台响应与试验结果对比分析
浮式平台模型试验在南京水利科学研究院的风浪流综合水池进行,水池底部按照岛礁实测地形数据及模型缩尺比(1 ∶40)构建了海底三维地形.图12为岛礁三维地形建造示意,图13为地形条件下浮式平台模型试验.试验中开展了规则波作用下浮式平台运动响应的试验测试,得到了平台在深水区和地形上的平台垂荡、横摇、纵摇3个自由度的RAO数值.文中基于势流理论开展数值模拟的岛礁地形及平台布放位置与试验相一致.图为数值计算与模型试验所得到岛礁地形下和深水条件下浮式平台运动响应RAO的对比.

图12 岛礁三维地形建造示意图Fig.12 3D terrain schematic diagram of island reef

图13 地形条件下浮式平台模型试验Fig.13 Topography floating platform model test chart
平台模型试验模拟的波浪周期T=5.0~12.0,ΔT=1 s).采用4根软弹簧消除平台的水平向运动,因此模型试验只给出了垂向3个自由度的RAO.从图14~19中可以看出:数值计算结果与模型试验值吻合良好;试验值普遍大于数值计算值,尤其是有岛礁地形的情况,可能是数值计算采用的是线性波理论求解,非线性特性没有体现;有岛礁地形的存在时,非线性特性体现更加明显,数值计算与模型试验的误差有所增加.整体而言,应用AQWA软件开展岛礁地形下平台的运动响应数值计算结果与模型试验值吻合良好.
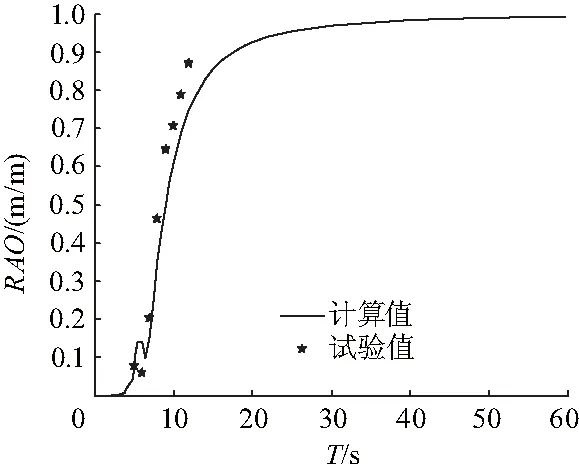
图14 平台垂荡RAO与试验对比(深水)Fig.14 Compare heave RAO with test (deep water)

图15 平台垂荡RAO与试验对比(浅水)Fig.15 Compare heave RAO with test (shallow water)

图16 平台横摇RAO与试验对比(深水)Fig.16 Compare roll RAO with test (deep water)

图17 平台横摇RAO与试验对比(浅水)Fig.17 Compare roll RAO with test (shallow water)
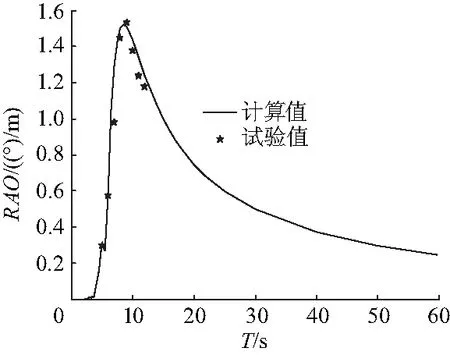
图18 平台纵摇RAO与试验对比(深水)Fig.18 Compare pitch RAO with test (deep water)

图19 平台纵摇RAO与试验对比(浅水)Fig.19 Compare pitch RAO with test (shallow water)
2.3 近岛礁地形下浮式平台短期预报分析
岛礁地形下浮式平台在不规则波的运动响应是通过3 h短期预报所得统计值.入射波采用JONSWAP谱,谱峰增长因子γ取3.0.具体的计算工况见表3.表5为浮式平台运动响应最大值数值计算与模型试验对比;表6为系泊缆张力最大值数值计算与模型试验对比.
岛礁地形下带有船舶靠帮的浮式平台在系泊模式状态下属于复杂的多体耦合作用(图20的计算模型示意),外界输入载荷包括波浪和风载荷,从表5可以看出:由于波浪和风的入射方向为90°,浮式平台的横荡、垂荡和横摇3个自由度受到较大的波浪载荷与风载荷,出现较大的运动量;在纵荡、纵摇和艏摇3个自由度上主要由于地形和船舶首尾不对称引起的载荷略微不对称,出现一个小量运动,在试验和数值计算中均不作为重点研究对象;基于AQWA势流软件处理复杂多体耦合问题中需要进行简化计算;模型试验处理此类复杂问题存在合理简化、仪器测量存在误差及数后处理对采集信号进行统计分析存在误差,误差之间存在累积效应;横荡、垂荡和横摇3个自由度运动为主要考核指标,数值计算与模型试验误差分别为横荡12.3%、垂荡25%、横摇11.1%.
从表6中可以看出:整个系泊系统中,除A2工况船舶艏部与浮式平台连接的系泊缆张力试验值大外,各个位置的系泊缆载荷数值计算结果均略大于模型试验.出现A2工况异常情况原因是由于船舶艏部纤瘦,初始预张力将船舶与浮式平台直接拉案,试验测试过程中,船舶沿船长方向出现错动,船舶与平台直接出现微小间隙,船舶艏部与浮式平台之间的系泊缆出现脉冲载荷,数值增大.

图20 计算模型示意Fig.20 Model diagram表5 浮式平台运动响应最大值数值计算与模型试验对比表Table 5 Comparison of numerical calculation and model test of maximum motion response of floating platform

海况纵荡/m横荡/m垂荡/m横摇/(°)纵摇/(°)艏摇/(°)A1计算值0.17.50.32.200.3A1试验值0.206.680.241.980.330.59A2计算值0.18.20.421.60.150.4A2试验值0.227.560.391.920.280.66

表6 系泊缆张力最大值数值计算与模型试验对比表Table 6 Comparison table between maximum value of mooring line tension and model test t
3 结论
(1) 应用AQWA软件,采用多体耦合的方式可以有效解决岛礁地形下的浮式平台的数值模拟,计算结果与试验结果吻合较好;
(2) 对比有无岛礁地形下浮式平台的运动响应传递函数,周期小于12 s的入射波激励下,岛礁地形下浮式平台运动量普遍小于无岛礁情况;
(3) 系泊模式下浮式平台(船舶停靠)在典型海况中运动响应和系泊缆张力的数值计算与模型试验结果存在一定差距,复杂环境下多体耦合的数值求解算法需要进一步完善.
文中采用的数值计算方法,通过有无岛礁地形与相应的模型试验结果对比分析,为近岛礁条件下浮式平台的运动性能和系泊系统的方案设计提供一种有效的分析方法和手段.
参考文献(References)
[ 1 ] 丛文超, 侯明君, 王志东, 等. 岛礁地形影响下多体浮桥的水动力性能研究[J]. 江苏科技大学学报(自然科学版), 2017, 31(5): 689-696. DOI:10.3969/j.issn.1673-4807.2017.05.023.
CONG Wenchao,HOU Mingjun,WANG Zhidong,et al.Investigation on hydrodynamic performance of floating piers near a reef island[J]. Journal of Jiangsu University of Science and Technology (Natural Science Edition), 2017, 31(5):689-696. DOI:10.3969/j.issn.1673-4807.2017.05.023.(in Chinese)
[ 2 ] 张威. 深海半潜式钻井平台水动力性能分析[D]. 上海:上海交通大学, 2007.
[ 3 ] 龙筱晔, 李巍, 尤云祥. 风浪流中Truss Spar平台耦合动力响应分析[J]. 中国海洋平台, 2013, 28(1): 29-35. DOI:1001-4500(2013)01-0029-27.
LONG Xiaoye,LI Wei,YOU Yunxiang.Coupled dynamic analysis for a deep-water Truss Spar platform in wind,waveand current[J].China Offshore Platform,2013,28(1):39-35.DOI:1001-4500(2013)01-0029-27. (in Chinese)
[ 4 ] 吴波, 程小明, 田超, 等. 岛礁地形下半潜平台水动力性能研究[J]. 船舶力学, 2015, 19(7): 773-781. DOI:1007-7294(2015)07-0773-09.
WU Bo,CHENG Xiaoming,TIAN Chao,et al.Investing on hydrodynamic performance of a semi-submersible platform near a reef island[J].Journal of Ship Mechanics,2015,19(7):773-781.DOI:1007-7294(2015)07-0773-09.(in Chinese)
[ 5 ] MANSOUR A M, HUANG E W. H-shaped pontoon deepwater floating production semisubmersible[C]∥Asme International Conference on Offshore Mechanics & Arctic Engineering.San Diego,USA:[s.n.],2007.
[ 6 ] CLAUSS G F, SCHMITTNER C E, STULZ K. Freak wave impact on semisubmersibles time-domain analysis of motions and forces[C]∥Proceedings of the 13th International Offshore and Polar Engineering Conference.Hawii,USA:[s.n.],2003.
[ 7 ] LOW Y M, LANGLEY R S. Time and frequency domain coupled analysis of deepwater floating production systems[J]. Applied Ocean Research, 2006, 28(6): 371-385. DOI:10.1016/j.apor.2007.05.002.
[ 8 ] 王玮, 刘小飞, 祝庆斌. 深海半潜式平台的水动力及系泊系统时域耦合分析[J]. 中国海洋平台, 2015, 30(6): 49-54.DOI:1001-4500(2015)06-0049-06.
WANG Wei,LIU Xiaofei,ZHU Qingbin.Analysis on the hydrodynamic performance and mooring scheme of the deepwater semi-submersible platform[J]. China Offshore Platform,2015,30(6):49-54.DOI:1001-4500(2015)06-0049-06. (in Chinese)
[ 9 ] 韩旭亮, 段文洋, 马山, 等. 系泊Spar平台波浪中耦合运动的数值模拟及模型试验[J]. 船舶力学, 2016, 20(1): 68-76.DOI:1007-7294(2016)01-0068-09.
HAN Xuliang,DUAN Wenyang,MA Shan,et al.Numerical simulation and experimental study on the coupled motion response of a mooring Spar platform in waves[J]. Journal of Ship Mechanics,2016,20(1):68-76.DOI:1007-7294(2016)01-0068-09.(in Chinese)
[10] 李秀娟, 高泽, 张可可, 等. 基于AQWA的新型半潜式海洋钻井平台水动力特性研究[J]. 中国海洋平台, 2015, 30(6): 91-98.
