基于卡尔曼滤波的新型船摇前馈补偿方法
2018-05-23,,
,,
(中国卫星海上测控部,江苏 江阴 214431)
0 引言

图1 船载雷达伺服驱动结构框图
船载雷达由于安装基座固定在甲板上,捕获目标时天线因船摇的影响无法准确的进行空间指向,通常船摇幅度远大于雷达波束宽度,即使跟踪上目标也有可能因此而丢失,因此隔离船摇是船载雷达系统设计时必须解决的关键问题之一[1]。目前,船载雷达系统主要采用自跟踪闭环、陀螺反馈、船摇前馈等方法隔离船摇,根据海况的恶劣情况单独使用一种方法或组合使用以期获得理想的船摇隔离效果[2]。船摇前馈信息包括船摇速度和船摇加速度,由计算机接收惯导设备敏感的船摇信息计算获得[3]。由于前馈量的计算误差包括惯导精度误差、坐标转换误差、船体变形误差等,因此船摇前馈一般只能给系统增加约7 dB的隔离度,难以满足12 m口径的船载X频段天线隔离度指标。针对这种情况,本文提出一种基于卡尔曼滤波的新型船摇补偿方法,直接利用滤波以后的高精度速率陀螺信号作为前馈补偿量,经过仿真和试验表明,可以极大地提高船摇隔离度。
1 船载雷达伺服驱动基本结构
船载天线驱动单元分为方位、俯仰两条驱动支路,俯仰支路采用直流电机双链驱动,方位支路采用直流电机双/四链驱动,对电机控制采用电消隙方式,在环路设计上采用三环控制[4]。同时,为实现电消隙,配置有偏置力矩环、差速抑制环,保证多电机的受力均匀。下面以俯仰支路为例,简单介绍伺服驱动基本结构。方位支路是双电机驱动系统,为保证高测量精度和高动态性能,与常规伺服系统设计一样采用典型的三环,电流环为最内环,通过改造马达控制器电流控制回路实现;速度环为中间环路,为自主设计环路,它为开环环路,将速度控制信息、偏置力矩信息、差速抑制信息等合成送给电流环;位置环为最外层环路,它为闭环环路,采用计算机通过设计控制算法实现天线精准控制。由于船载测控设备工作环境特点,增加了抑制船摇的陀螺环,在天线特定位置固定2个陀螺,用于感知天线相对基准的转速,将感应出的电信号经过处理后馈入速度环,从而实现克服船摇的目的。该系统的结构框图如图1所示。
2 陀螺反馈法隔离船摇
船载雷达伺服系统为了提高系统船摇隔离度通常采用陀螺反馈稳定方案,即在天线轴上(方位和俯仰)分别安装速率陀螺,敏感船摇在天线轴上的角速度反馈闭环构成陀螺环稳定回路,隔离船摇对系统跟踪性能的影响,提高系统的跟踪精度。陀螺环作为位置环的内环,主要起以下作用:
1)速率陀螺能够提前获取船体摇晃对天线轴的影响,进而通过陀螺环稳定回路降低船体摇晃造成天线指向扰动的不利影响,这种方法比单纯利用位置环路闭环稳定隔离度船摇的效果要好,而且更快。
2)陀螺环构成位置环的内环,控制天线朝着角误差减小的方向运行,实现对目标的随动跟踪。隔离度。
3 船摇前馈补偿原理
船摇前馈补偿就是将船摇扰动信号引入速度环输入端,构成前馈复合控制,达到船摇隔离的目的。在船体安装三轴速率陀螺,用于感应横摇、纵摇和航向三个方向的船摇速度分量,经过坐标变换转换成方位、俯仰轴的船摇扰动信号加到系统中。坐标变换公式为:





图2 船摇前馈原理框图

由此可计算船摇前馈隔离度为:
根据船载雷达伺服系统的数学模型,利用MATLAB计算前馈隔离度,当船摇扰动ω=0.5 rad/s时,
可见由陀螺实测数据作为前馈量的船摇前馈隔离度远大于计算机辅助计算的前馈补偿。但是陀螺在实际使用过程中,受船体振动的影响、以及陀螺内部信号处理产生的热噪声以及传输过程都会造成输出数据中存在着多余的噪声干扰,在开环控制中这些噪声都被放大,有可能降低系统跟踪精度以及稳定性等问题[5]。因此必须对陀螺的测量数据进行滤波以后才能加入到系统环路中。
4 卡尔曼滤波
4.1 基本原理
卡尔曼滤波是一种线性最小方差估计方法,通过系统输入输出观测数据,对系统状态进行最优估计的算法。其基本思想是首先建立噪声与信号的状态模型,然后分别计算前一时刻的估计值以及当前时刻的观测值,通过估计值和观测值来当前时刻状态变量的值。这种滤波算法非常适用于实时处理和计算机运算,其算法如下:
设随机线性离散系统的状态方程和测量方程为:
Xk=φk|k-1Xk-1+Γk|k-1Wk
Yk=HkXk+Vk
其中:Xk表示状态向量,φk|k-1表示系统状态转移矩阵,Hk表示测量矩阵,Wk表示过程噪声,Vk表示测量噪声。假设Wk和Vk是互不相关的零均值高斯白噪声,即:
由此可得到卡尔曼滤波算法迭代过程如下:
Kk=Pk|k-1HkT(HkPk|k-1HkT+Rk)-1
Pk= (1-KkHk)Pk|k-1
4.2 滤波器
由于速率陀螺输出的是天线角度上的变化率,导致滤波器的测量方程的观测误差是彼此耦合的,造成滤波测量方程相互耦合。虽然假定滤波器的状态方程相互独立,但是为了保证滤波效果仍需将滤波器设计为六态滤波器,导致滤波计算过程非常繁杂。由于我们采用的是直角坐标系,根据相关资料和工程经验,可近似认为测量误差互不相关,因此可以将滤波器分别设计为两个三态滤波器,这将极大的简化滤波计算过程,而对滤波性能无明显影响。因此本文采用这种线性化解耦后的滤波算法。
4.3 滤波效果
这里以俯仰陀螺输出电压为例,利用卡尔曼滤波对陀螺输出数据进行处理。滤波结果如图3所示。图中实线条为滤波前的陀螺输出值,虚线条为滤波后的陀螺输出值,右图为左图的局部放大图。从图中可见通过卡尔曼滤波以后可以有效的降低陀螺噪声。

图3 俯仰陀螺滤波前后输出曲线
5 仿真分析
利用 MATLAB/Simulink 对船摇前馈补偿方案进行仿真分析。卡尔曼滤波算法在 MATLAB 中用m语言编制函数实现,并在 Simulink中用 MATLAB Function模块调用该函数,陀螺在船摇扰动下的测量数据作为卡尔曼滤波器的输入,卡尔曼滤波器输出的速度量作为前馈信息加入速度回路前端,从而实现基于卡尔曼滤波器的陀螺前馈补偿方案的仿真。仿真框图如图4所示,将仿真数据输出到 MATLAB 的工作空间进行处理,得出此时的总船摇隔离度为56 dB。
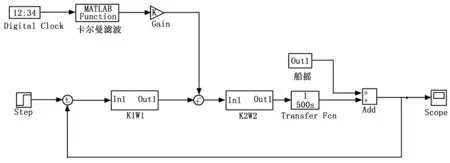
图4 前馈补偿方案仿真框图
同时本文给出了船摇扰动作用下加入基于前馈补偿方案伺服分系统稳态输出响应曲线如图5所示,可见前馈量的加入也没有改变系统的稳定性。

图5 系统稳态输出响应曲线
6 应用效果
为了检验新方法隔离船摇的效果,针对某船载X频段天线进行船摇隔离度测试。按照《航天测量船船载测控通信设备船摇隔离度检测方法》的试验要求[6],船舶生摇满足检测方法的试验条件,天线跟踪信标球完成相关的测试。测试环路包括:自跟踪环、自跟踪环+陀螺环、自跟踪环+船摇前馈、自跟踪环+陀螺环+船摇前馈总隔离度,通过对测试数据进行处理,结果如表1所示。从表中试验结果可见,基于卡尔曼滤波的新型船摇前馈补偿方案能较大幅度的提高船摇隔离度从而提升系统跟踪性能。

表1 船摇隔离度测试结果(俯仰)
7 结论
本文针对计算机辅助船摇前馈技术对系统隔离度提升不多的问题,从原理和仿真两方面分析了利用陀螺实测数据作为前馈量的船摇补偿方案对系统隔离度的贡献,并进行了试验测试。船载雷达在实际工作过程中受船体振动等环境影响,可能会在前馈支路引入其他噪声。对于船体环境引入的高频噪声,卡尔曼滤波可以起到很好的滤波作用,而且速度环有低通滤波器特性,高频噪声不会在输出端体现;对于船载环境引入的低频噪声,卡尔曼滤波也可以起到较好的滤波作用,而且低频噪声可以算做船摇的一部分,通过前馈系数的调整可以达到较好的隔离效果。试验结果表明该补偿方法能较大程度的提高系统隔离度。
参考文献:
[1] 瞿元新,周锦标,谢 勇. 船载测控设备船摇隔离度自动化测试方法研究[J].飞行器测控学报,2006,25(4):62-65.
[2] 刘四方,罗友明. 基于VC++的77船摇隔离度自动化测试研究[J].微计算机信息,2008,24(4):36-37,53.
[3] 王 恒,李永刚,陈 亮,等. 测量船船摇前馈数据处理方法研究及应用[J].飞行器测控学报, 2011, 30(2):64-69.
[4] 丁求启,陶 敏,张桂平. 智能积分器在船载大口径天线伺服系统中的应用[J].电子设计工程,2013, 21(9):174-176.
[5] 陶 敏,丁求启,张桂平. 一种基于卡尔曼滤波的船载伺服系统随机误差处理方法[J]. 电子设计工程,2013, 21(10):28-31.
[6] 杨鼎新. 航天测量船雷达天线前馈技术应用分析[J]. 自动化技术与应用,2013, 32(12):51-54.
