动物细胞悬浮培养过程神经网络逆解耦控制
2018-05-23,,,
,,,
(江苏大学 电气信息工程学院,江苏 镇江 212013)
0 引言
近些年来,禽流感、口蹄疫等动物传染病不断发生,疫苗、抗体类药物的市场需求量大幅增加,传统的转瓶培养方式存在细胞密度低、病毒产率低、生产成本高等缺点,不能满足现代生物制苗的要求,而动物细胞的悬浮培养方式以细胞增殖快、生产效率高等优势,逐步取代了传统的转瓶培养方式,并成为当前工业生产疫苗的主流技术[1]。生物制品生产过程研发的两个主要目的是提高产率、保证产物质量的可靠性,前者直接关系到商业化生产的可行性,后者则关系到药物的安全性和有效性[2]。
动物细胞悬浮培养过程涉及细胞的生长、繁殖和代谢,是一个复杂的生物化学过程,该过程是具有时变性、不确定性和非线性的多输入多输出强耦合系统[3]。提高动物细胞悬浮培养过程生产水平的关键在于控制和优化生物反应过程的环境因子,即温度、压力、pH值和培养基浓度等这些操作条件,利用过程控制和补料优化控制的方法,将动物细胞悬浮培养过程准确的控制在最优的环境和操作条件下。动物细胞悬浮培养过程中典型的环境因子包括温度、压力、pH值等,其控制方法的研究比较早也比较成熟。但在实际的动物细胞悬浮培养过程中,各参数之间的强耦合性给那些依据数学模型的控制方法带来了很大的不便,对一些生物参数(如细胞密度、基质浓度和产物浓度)的控制是培养过程的关键。
反馈线性化方法是非线性系统控制研究方向的一次重要突破,它可以将非线性系统变换为线性系统,然后就可以按线性系统理论对系统进行控制[4]。然而反馈线性化方法理论严谨,要求被控对象的数学模型和系统参数精确已知,由于动物细胞悬浮培养过程模型的不确定性和参数的时变性,因此控制性能比较差。而智能控制方法不依赖或不完全依赖被控对象的数学模型,很多学者尝试运用神经网络、遗传算法等方法来实现对非线性系统的控制[5-6],但理论分析困难。
神经网络逆控制方法将神经网络与逆系统方法相结合,发挥各自的优点,可实现对一般非线性系统的线性化解耦控制[7-9],其基本原理是:采用由静态神经网络和若干积分器组成的动态神经网络来构造被控系统的逆系统,然后串联在原系统前对被控系统进行线性化并解耦,然后按线性系统理论对各解耦后的子系统进行高性能控制。本文采用神经网络逆控制方法对动物细胞悬浮培养过程进行线性化解耦,结合传统PID控制和模糊控制的优点[10-11],建立PID参数自调整的推理规则,设计了模糊PID制器对各解耦后的线性子系统进行控制,通过仿真验证了其良好的控制性能。
1 动物细胞培养过程数学模型
细胞的生长、繁殖和代谢是一个复杂的生物化学过程。该过程既包含细胞内的生化反应,也包括细胞内外的物质交换,还包括细胞外的物质传递及反应。因此,要对这样一个复杂的过程进行精确的描述几乎是不可能的,为了工程上的应用,首先要对其进行合理的简化,在简化的基础上建立过程的数学模型。
在培养过程中,细胞、基质和产物的物料衡算为:
变化量 = 注入量 + 生成量 - 流出量
(1)
因此,上述物料衡算写成数学表达式为
(2)

上述方程式中:X为细胞密度,S为基质浓度,P为产物浓度,F为进料流量,f1为葡萄糖流加速率,f2为硫酸铵流加速率,f3为氨水流加速率。模型参数如下:最大比生长速率μm=0.092,细胞生长基质限制饱和常数KS=0.15,抑制常数KP=0.002、Ki=0.1,细胞对基质的得率系数YX/S=0.45,产物对基质的得率系数YP/S=0.9,产物最大比生成速率μp=0.005,细胞生长基质维持系数mx=0.014,水解速率常数K=0.04。
在方程式(2)中,定义状态变量为:
x=(x1,x2,x3,x4)T=(X,S,P,V)T
输入变量:u=(u1,u2,u3)T=(f1,f2,f3)T
输出变量:y=(y1,y2,y3)T=(X,S,P)T
则系统的状态方程为:
(3)
2 系统可逆性分析
应用神经网络逆系统方法的前提是被控系统可逆,因此构造逆系统前必须先分析系统是否可逆,对于一般的MIMO(多输入多输出)非线性系统:
(4)
可逆性分析[12-13]分为三步:
1)采用Interator算法对输出函数y=h(x,u)不断求导,直到Yq= (y1(α1 ),...,yq(αq ))T(q为系统输出个数)中的各个分量均显含输入u;
2)Yq=(y1(α1 ),...,yq(αq ))T在(x0,u0)的某邻域内满足det(∂Yq/∂uT)≠0(符号“det”表示对雅可比矩阵求行列式),系统存在向量相对阶α=(α1,α2,...,αq)T;
3)如果系统存在向量相对阶满足α1+α2+...+αq≤n(n为系统状态矢量维数)。
由系统状态方程式(3)可知,动物细胞悬浮培养过程数学模型表现为三输入三输出的一阶非线性系统,根据上述系统可逆性分析方法,系统输出对输入的雅可比矩阵为:
(5)
在实际培养过程中,细胞密度、基质浓度、产物浓度、培养液体积均大于0,k1和k2为不为0的常数,所以有:
(6)
系统的相对阶数α=(α1,α2,α3)T=(1,1,1)T,且α1+α2+α3=1+1+1=3<4,表明系统是可逆的,由隐函数存在定理可知,逆系统可表示为:
(7)
3 神经网络逆系统解耦控制
逆系统方法是反馈线性化方法中一种比较直观且易于理解的方法,但要求被控对象的数学模型和参数精确已知,由于动物细胞悬浮培养过程模型的不确定性和参数的时变性,很难求出方程式(3)的解析逆,而神经网络不依赖被控对象的数学模型,可以逼近任意复杂的非线性函数。因此,可以用神经网络来构造出逆系统(7)串联在原系统前对其进行解耦控制,具体步骤如下:
3.1 产生训练集和测试集

1)异常数据剔除。

(8)
若样本数据xi的偏差Εi满足:
Εi>3σ
(9)
则认为该数据为异常数据并将其剔除。
2)数据变换。
实际实验数据中的输入输出数据组往往不是一种量纲(数量级),为减小系统误差,本文采取了数据归一化方法,主要原理如下:
(10)

3.2 构造神经网络逆系统
在辨识动物细胞悬浮培养过程神经网络逆系统时,本文选用了经典的BP神经网络,已经证明,只含有一个隐含层的三层BP神经网络具有实现任何复杂非线性映射的能力,根据实际情况可以确定输入层有6个节点,输出层有3个节点,经过大量调试最后确定隐含层有15个节点,其隐含层神经元的激励函数为式(11)的单调光滑双曲正切函数,输出层由具有线性阈值激励函数的神经元组成。
(11)
按照功能或目的的不同,逆系统又分为左逆系统和右逆系统,本文研究的是动物细胞悬浮培养过程神经网络逆解耦控制问题,因此本文使用的是右逆系统即逆系统串联在原系统前面。可以把一组期望输出{X*,S*,P*}作为输入加在系统前面,可以得到系统的实际输出{X,S,P}。其神经网络逆系统结构如图1所示。图中静态神经网络用于表征逆系统的非线性关系,积分器用于表征逆系统的动态特性。将其串联在原系统前得到3个已经解耦的伪线性子系统。

图1 动物细胞悬浮培养过程复合伪线性系统框图
4 控制系统设计

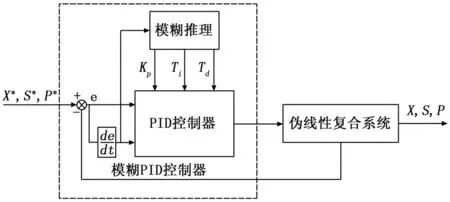
图2 模糊PID控制结构框图
传统PID控制器所采用的算法为:
(12)
式中,k为采样序号,k=0,1,2…,u(k)为第k次采样时刻控制器的输出值,e(k)为第k次采样时刻输入的偏差值,e(k-1)为第(k-1)次采样时刻输入的偏差值,Ti为积分时间常数,Td为微分时间常数。
利用模糊逻辑规则对传统PID算法进行整定,可以产生如下的模糊规则:
KP(k)=KP(k-1) ANDTi(k)=Ti(k-1) ANDTd(k)=Td(k-1)
如果偏差和偏差变化率都在允许范围内,则PID参数和前一时刻相同。
KP(k)=α1KP(k-1) ANDTi(k)=α2Ti(k-1) ANDTd(k)=α3Td(k-1)
如果偏差和偏差变化率太大,则减少比例、积分和微分作用。
KP(k)=KP(k-1)/α1ANDTi(k)=Ti(k-1)/α2ANDTd(k)=Td(k-1)/α3
如果为单调过程,且偏差变化率太慢,则加强比例、积分和微分作用。
上述模糊规则中,m1,m2,m3为细胞培养过程中的经验指标,α1,α2,α3为加权因子,均可在线调整。
神经网络逆系统与原系统串联后组成伪线性复合系统,该伪线性复合系统由一个一阶线性细胞密度子系统、一个一阶线性基质浓度子系统和一个一阶线性产物浓度子系统构成,这样一个复杂的非线性强耦合系统就变成3个简单的线性系统,然后再对各子系统用上述设计好的模糊PID控制器进行控制,给定系统细胞密度、基质浓度和产物浓度最优经验参考值,这样通过控制补料参数u1、u2和u3的流加速率,就可以使得关键参数始终保持最优轨迹,实现动物细胞悬浮培养过程的最优控制。完整的动物细胞悬浮培养过程神经网络逆解耦控制结构如图3所示。

图3 细胞培养过程神经网络逆系统解耦控制结构图
5 仿真实验与分析
在仿真实验中,为了验证神经网络逆系统的解耦效果和所设计控制器的控制效果,下面将分别给各子系统不同的信号作为系统给定值,并使用传统PID控制器和模糊PID控制器分别对系统进行控制。其中细胞密度的给定值设为10 g/L且保持不变;基质浓度的给定值为一个阶跃信号,初始值为25 g/L,在t=48 min时刻,给定值突变到17 g/L;而产物浓度的给定值是一个方波信号,初始值为60 g/L,在t=40 min时刻突变到20 g/L,在t=80 min时刻又突变到48 g/L。各子系统的仿真结果如图4、图5和图6所示。其中图4 (a)、图5(a)和图6(a)为传统PID控制器的控制效果,作为对比,图4(b)、图5(b)和图6(b)为相同条件下模糊PID控制器的控制效果。
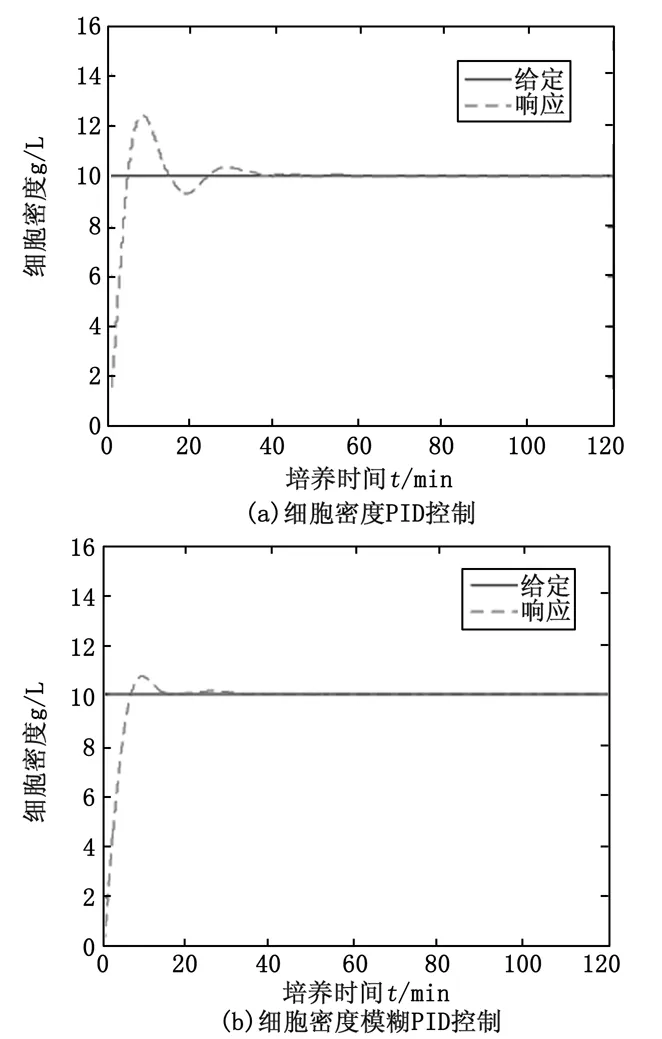
图4 细胞密度跟踪响应图
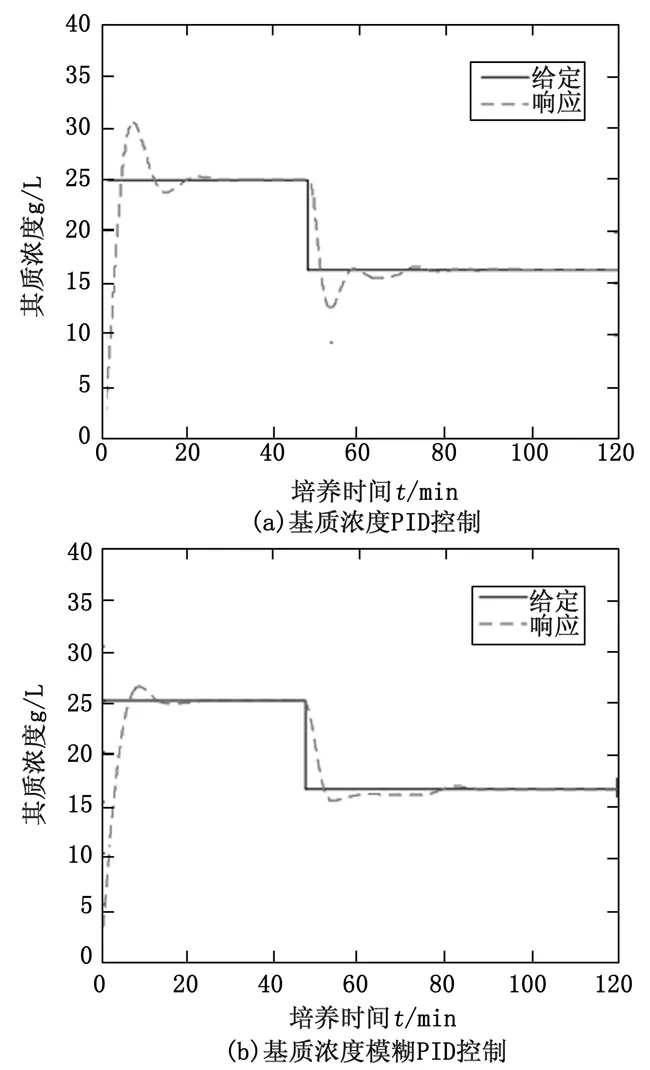
图5 基质浓度跟踪响应图

图6 产物浓度跟踪响应图
从仿真波形可以看出,系统的细胞密度响应、基质浓度响应和产物浓度响应可以对各自的给定实现跟踪,即各自输入只影响各自的输出,从而达到了对动物细胞培养过程解耦的目的。从仿真对比图得出,无论采用传统PID还是模糊PID对系统进行控制,都有很好的控制效果。但模糊PID控制效果明显优于传统PID控制,超调小,调节精度高,能在短时间内响应系统的给定值。这主要是由于模糊PID控制器是利用模糊控制器计算kp、ki、kd三个参数,然后再用这三个参数去进行PID计算,因此能达到较快的调整速度,同时能实现精确的控制效果。
6 结论
本文将神经网络逆系统方法应用于动物细胞悬浮培养过程解耦控制中,神经网络逆系统与原系统串联构成伪线性复合系统,实现了对被控对象的线性化解耦,采用模糊PID控制器对各解耦后的线性子系统进行闭环控制,仿真研究表明系统具有优良的控制性能,系统对于给定的期望输出能实现快速跟踪,控制过程能够适应过程模型的不确定性和参数的时变性,解决了动物细胞悬浮培养过程高性能控制的核心问题。
参考文献:
[1]梅建国, 庄金秋, 王金良,等. 动物细胞大规模培养技术[J].中国生物工程杂志, 2012, 32(7):127-132.
[2]张 韧, 秦玉明, 陈文庆,等. 悬浮培养技术在生物制药中的应用和展望[J]. 中国兽药杂志, 2011, 45(3):56-60.
[3]Sbarciog M, Coutinho D, Vande Wouwer A. Kinetics independent multivariable robust control of animal cell cultures[A]. System Theory, Control and Computing[C]. IEEE, 2013:479-484.
[4]戴先中.多变量非线性系统的神经网络逆控制方法[M].北京:科学出版社,2005.
[5]李春华, 李 欣, 罗 琦. 不确定非线性系统的直接自适应神经网络控制[J]. 计算机工程与应用, 2008, 44(6):124-126.
[6]Li WZ, Wu LY, Guo L. Reduced-Order Active Control for Structural System with Nonlinear Uncertainty Based on Genetic Algorithm[J]. IFAC Proceedings Volumes, 2008, 41(2):13426-13431.
[7]李亮亮, 何 勇, 叶海翔. 永磁同步电动机神经网络逆系统简化模型的研究[J]. 微特电机, 2010, 38(7):57-59.
[8]赵 君, 刘卫国, 骆光照,等. 永磁同步电机神经网络逆解耦控制研究[J]. 电机与控制学报, 2012, 16(3):90-95.
[9]王 新, 戴先中. 同步旋转坐标系下感应电机神经网络逆控制[J]. 电气传动, 2008, 38(5):52-57.
[10]丁文双, 胡育文, 鲁文其,等. 永磁同步电机模糊PID参数自整定[J]. 微特电机, 2011, 39(5):17-21.
[11]屈 毅, 宁 铎, 刘飞航,等. 模糊PID控制器的设计及其仿真[J]. 计算机仿真, 2009, 26(12):130-132.
[12]朱志莹, 李祖明, 周云红,等. 磁悬浮开关磁阻电机线性二次型最优逆解耦控制[J]. 微电机, 2015, 48(12):45-50.
[13]朱茂飞, 陈无畏, 夏 光. 基于神经网络逆系统方法的汽车底盘解耦控制[J]. 农业机械学报, 2011, 42(12):13-17.
[14]徐前勇, 张运陶. Paǔta准则在醚化温度预测建模异常数据剔除中的应用[J]. 西华师范大学学报(自然科学版), 2011, 32(4):348-352.
收稿日期:2017-09-11;修回日期:2017-10-18。
基金项目:国家基金项目(51567019,51167013);省教育厅项目(GJJ11165)。
作者简介:吕彩艳(1992-),女,安徽黄山人,硕士研究生,主要从事微电网优化方向的研究。
程若发(1971-),男,安徽六安人,教授,硕士研究生导师,主要从事微电网建模与仿真方向的研究。
文章编号:1671-4598(2018)05-0275-03 DOI:10.16526/j.cnki.11-4762/tp.2018.05.068中图分类号:TM743文献标识码:A
