浅海观测网的系泊系统的设计
2018-05-22高立刚许友军刘若男
高立刚,许友军,刘若男,李 伟
(南华大学数理学院,湖南衡阳,421001)
系泊系统设计的本质就是使得浮标吃水深度、钢桶倾斜角度尽可能的小,游动区域尽可能窄[1-2]。在选定指定的电焊锚链,以及传输节点分布在水深、海水密度都已知的海域,针对海面风速v对应下的系泊系统(如图1)状态,文中分别研究锚链存在部分沉底时的风速12m/s,锚链刚好不沉底时的风速24m/s,锚链被拉动时的风速36m/s下各自情况下的系泊系统具体状态,从而得出相对应速度区间下满足的悬链数学公式模型。
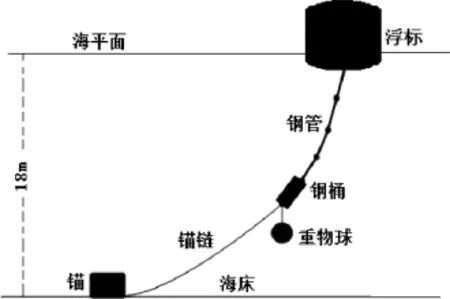
图1 系泊系统示意图Fig.1 Mooring system schematic diagram
1 临界风速模型
根据悬链线模型[1-8],考虑锚链沉底情况,假设理想状态下(即刚好不沉底),锚链长度为22.05m(此处锚链长度是根据图1中水深18m算出来的),并且改变风速时,重物球与钢桶的高度改变很小,这里假定高度不变;再对得到的一系列的不同风速下的锚链方程,并利用Matlab绘制出一系列风速下的高度变化(见图2),取同一高度下的锚链长度,找出一系列风速下的弧长等于22.05m时的风速V0,即为保证锚链恰好不沉底的风速。
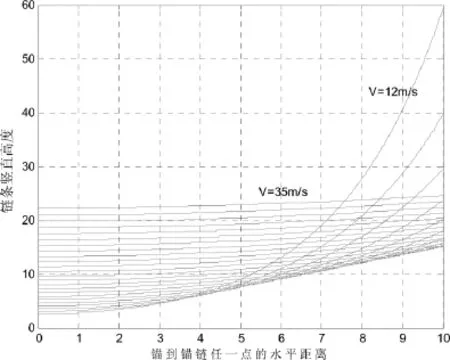
图2 不同风速下的锚链满足的悬链线Fig.2 The anchors under different wind speeds meet the catenary lines
考虑其钢管、浮标、重物等物体的浮力,结合一系列的不同风速下的锚链方程,满足弧长s=22.05m、h=12.306m时的风速V0=23.5m/s,即:
(1)当V<V0时,锚链的底端是存在部分长度的沉底,即θ=0°(等于0),此时系泊系统的状态可以仿照12m/s风速时求出相对应的系泊状态;
(2)当V=V0时,锚链的底端与锚点恰好与海床保持水平,即θ=0°;
(3)当V>V0时,锚链在锚点与海床的夹角θ>0°,此时系泊系统的状态可以仿照24m/s风速时求出相对应的系泊状态。
当海面风速V=12m/s时,锚链只有没有接触海床的部分满足悬链线方程的条件,故而,考虑未沉底部分锚链:

根据锚链竖直高度Δh=12.306 m,利用弧长公式得到未沉底的锚链的长度Lx=15.3548m,从而得知当V=12m/s时,沉底的锚链长x'=6.6952m。
根据弧长[2]可得到锚链方程上每点的斜率满足:

其中σ为链条单位长度的质量,H为锚链水平向左的张力,g为重力加速度,x为锚链水平长度。
当x=7.5567m,锚链与钢桶接触点的斜率为y'=4.4808,此时锚链在钢桶节点处与竖直方向的夹角为θ=12.5415°。
对上述过程进行多次迭代,得到当V=12m/s时,沉底的锚链长x'=6.6573m。当x'=6.6573m时,锚链在钢桶节点处与竖直方向的夹角θ=12.6231°。
由上述讨论,根据沉底锚链长以及未沉底锚链的曲线方程,到V=12m/s时锚链在水中的形状,如图3所示。
同理,考虑到V=24m/s时,锚链不存在沉底,故根据锚链方程得到V=24m/s时锚链在水中的形状,如图4所示。

图3 12m/s时锚链整体形状图Fig.3 The overall shape of the chain at 12m/s
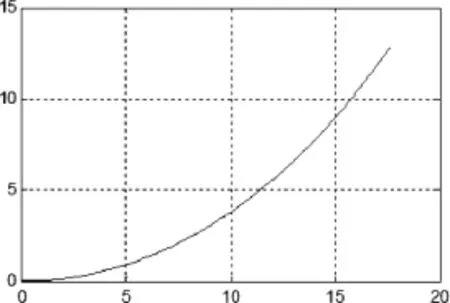
图4 24m/s时锚链整体形状Fig.4 The overall shape of the chain at 24m/s
(注:针对12m/s,以锚为坐标原点,0<x<6.6573m时锚链沉底,即竖直高度 y=0m;6.6573m≤x<14.2609m时,锚链形状满足悬链线方程)
2 力系平衡模型
取出钢桶作为隔离体,并对其进行受力分析[4],如图5所示。
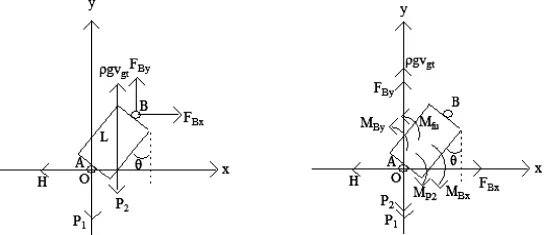
图5 钢桶平移力系后产生弯矩分析Fig.5 Analysis of bending moment after translation of steel drum
FBy、FBx为1号钢管BC施加给钢桶的作用力,P2为钢管自身重力,P1为重物球、重物球的浮力和锚链的重力之和,因此有

其中mm为不在海底的那部分锚链的质量,mz为重物球质量,g为重力加速度,Fm为锚链受到的浮力,Fz为重物球受到的浮力。
根据力的平移定理[5],可以求出力平移后产生的弯矩。同时根据平衡力系平衡条件可得:

解得钢桶的倾斜角β为

其中ρ为海水密度,vgt为钢桶体积。
由风荷载近似公式F=0.625×sv2,
(1)当v=12m/s,F=237.24N=H,锚链在钢桶节点处与竖直方向的夹角为θ=12.6231 °,吃水深度 y=0.682 时,可得可得钢桶的倾斜角β=1.078698141°。
(2)当风速为v=24m/s,吃水深度为y=0.7010m,锚链在钢桶节点处与竖直方向的夹角为 θ=31.7177°,可得可得钢桶的倾斜角β=3.875574314°。
同理可得钢管角度求解公式:


其中θi为第i根钢管的倾斜角,L1为钢管长度。
3 游动区域的求解模型

(1)当风速为12m/s时,x3≈0.0905m游动半径为:r=x3+14.2519=14.3424m;
(2)当风速为24m/s时,x3≈0.3322m游动半径为:r=x3+17.1581m=17.4903m。
根据临界风速模型、力系平衡模型、游动区域的求解模型,针对水深18m的水域状况,计算得出不同风速(12m/s与24m/s)下系泊系统各部分的角度改变参数,如表1。
由上可得钢桶及钢管在海底的投影长度x3,即

表1 具体风速下的系泊系统状态Table 1 The state of mooring system under specific wind speed
4 悬链重物的确定[6]

考虑到锚与锚链上端为整个悬链线的一部分,依据根据Δh=12.306m以及Lx=22.05m,据此得到锚的坐标点为(10.4286,30.8413),得到:x=28.4563m,此时锚链在锚点与海床的夹角θ'=19.0149°;同理求出此时系泊系统的状态。
当v=36m/s时,角度及游动半径都是在固定锚时计算出来的,实际上锚链已经被拖动。此时,需要调节重物球的质量,使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度。
利用改变步长反复迭代来对相应的角度进行考虑,发现将重物球质量增加到3200kg满足条件,此时浮标吃水深度由h=0.723m变为h=1.3444m,同时考虑到钢桶在36m/s的情况下的倾斜角θ=8.5589°以及钢管的倾斜角,综合得到Δh=12.3736m,相应的锚链方程改变为

当海面风速V=36m/s时,易知锚链底端不存在沉底的情况,得到对应的锚链方程:
经过多次回代运算,使得浮标吃水高度不断接近精确值,得到浮标吃水深度由h=0.723m变为h=1.2156m,此时锚链与海床的夹角θ'=6.3405°<16°,钢桶的倾斜角为β=4.7121°<5°,增加的重物质量为 2000kg。
针对市场上锚链的不同型号(见表2),这里对型号的选择进行讨论。
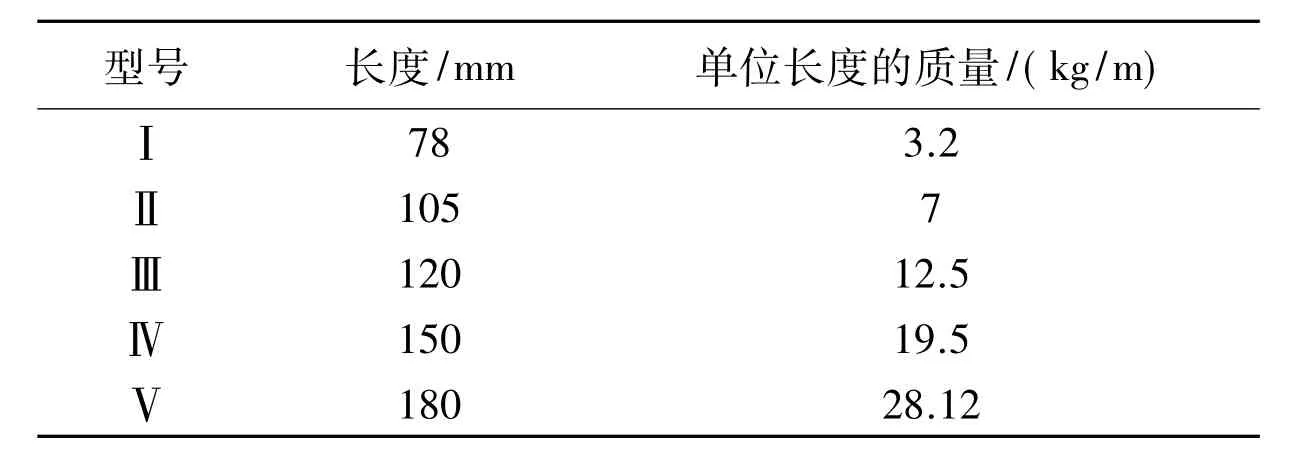
表2 锚链型号和参数表Table 2 Chain model and parameter table
这里对于锚链型号的确定,文中考虑等水平力作用下的不同型号下的锚链方程,并对同一高度下的锚链的重量进行比较,取等水平力作用下同一高度锚链的重量作为参考量,取五种型号中的重量最少的锚链。
对于Ⅰ,Ⅱ,Ⅲ,Ⅳ,Ⅴ型号的单位长度,并对于给定同一水平作用力1000N时,满足:

以及不同型号下的锚链在等水平力的作用下,锚链的竖直高度的改变如图6所示。
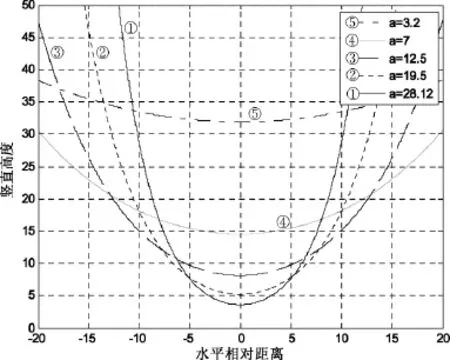
图6 不同型号等水平力下的悬链曲线图Fig.6 The catenary curve of the horizontal force of different models
对于给定的相对锚同一高度值12m,计算出不同型号下的弧线长

对应的重量为
Mi=(96.4950,155.5603,230.46125,320.1744,427.4718),
由于近海水深介于16m~20m之间,布放区域海水的最大速度为1.5m/s,风速最大达到36m/s,这里考虑最恶劣的情况下,即水深为20m,海水速度为1.5m/s,风速36m/s下的系泊系统的设计[7],倘若最恶劣的条件下都满足要求的系泊系统,在其他情况下系泊系统也满足要求。
当水深为20m,海水速度为1.5m/s,风速36m/s时,通过多次对重物球重量的调整得到满足条件下的悬链线方程:

此时,钢桶的倾斜角β=4.7317°<5°,说明该悬链线方程下的系泊系统满足最恶劣的情况。该系泊系统的锚链的长度s=23.0299m,重物球质量m=3500kg。此时,系泊系统各部分的角度改变参数见表3。

表3 36m/s风速下的系泊系统状态Table 3 Mooring system state at 36m/s
5 模型的推广与改进
这里研究了近浅海观测网的系泊系统的设计问题,在系泊系统的设计方面有一定的参考价值。对于其中的不足,可以在参考水流层流情况下对系泊系统进行具体研究,以得到更为准确解,或从多角度对锚链进行参考分析,以选择最优锚链型号。再可利用软件对所得数值解进行验证。
参考文献:
[1]柳燕.从达·芬奇的问题到一条著名的曲线——悬链线[J].科技信息,2012,1:135-136.
[2]胡灵斌,唐军.悬链线方程的求解及其应用[J].船舶,2004,1:17-20.
[3]杨万昌,沈潘浩.多成分悬链式锚泊线静态特性分析[J].中国水运,2016,37(03):36-37.
[4]王铎,程靳.理论力学[M].(第 7 版).北京:高等教育出版社,2009.
[5]邢富冲.悬链线弛垂度的计算方法[J].数学的实践与认识,2004,34(11):98-101.
[6]李淑一,王树青.基于多体分析的浅水FPSO和水下软钢臂系泊系统运动特性研究[J].中国海洋大学学报,2011,41(09):95-102.
[7]常洪波.倾斜海底及瞬态潮汐流对单点系泊系统的影响[D].大连:大连理工大学,2014.
[8]夏伟宇,朱家明,李德政,等.基于悬链线理论对系泊系统的优化设计[J].西昌学院学报,2017,31(01):31-35.
