双馈船舶混合轴带系统变速恒频装置研究
2018-05-18赵统向大为
赵统,向大为
(同济大学电子与信息工程学院,上海 201804)
0 引言
随着温室效应的加剧和化石燃料的日益减少,世界各国对节能减排工作更加重视,节能减排的问题已成为社会经济发展的突出矛盾,对于经济正处于高速发展的发展中国家,尤其是中国,节能减排是缓解环境问题和能源危机对经济发展的束缚、增强可持续发展能力的重要方法。
船舶是全世界大部分的货物运输的工具,船舶运输业是化石燃料消耗和排放的主要行业,其营运费用中燃料费用一般占运费的50%以上[1]。因此,船舶的轴带系统成为研究热点,它可有效的降低船舶的能源消耗,并提高船舶动力系统的可靠性。船舶轴带系统通过与主轴相连的轴带电机利用主机10%~15%的功率储备裕量发电,使主机运行在高能效的最佳状态,节约了船载柴油发电机的轻质柴油消耗,它是节约燃料的有效途径之一[2-6]。
轴带系统从20世纪70年代开始装船,被广泛应用在燃油消耗量较大的大、中型集装箱船以及矿砂船、液货船等远洋和工程船舶上。但是传统轴带系统动态性能较差,随着主机转速变化,其电能质量很不稳定,无法长时间与船载柴油发电机并网发电,使其节能减排效果受限。随着现代电力电子与电力传动控制技术的发展,采用电力电子器件的变速恒频装置可以实现恒频恒压发电,采用矢量控制也可使有功、无功功率解耦控制、灵活调节,使轴带系统发挥最大的效能。因此,变速恒频装置受到了广泛的关注。
本文将采用矢量控制(定子电压定向)的双馈混合轴带系统的设计和实现作为研究重点。在第1部分对矢量控制(定子电压定向)的原理进行分析;第2部分,利用Matlab/Simulink搭建双馈混合轴带系统的模型,验证控制算法和系统参数[7-9];第3部分,利用仿真参数搭建双馈混合轴带系统变速恒频装置,记录系统在不同工况下的实验结果。第4部分,分析仿真及实验数据,得出结论。
1 基于定子电压定向的矢量控制策略
如图1所示,在双馈混合轴带系统中,通常采用定子电压定向的矢量控制[10-16],将d轴与电网电压矢量对齐,因此在d轴和q轴的定子电压为:


式中, fs是发电机的定子频率(也就是电网电压频率)。定子电压矢量角 θs是相对于定子坐标系的角度。
发电机转子角速度为,转子位置角 θr是转子位置相对定子坐标系的角度。定子电压矢量和转子电压矢量之间的角度差为转差角,定义为:

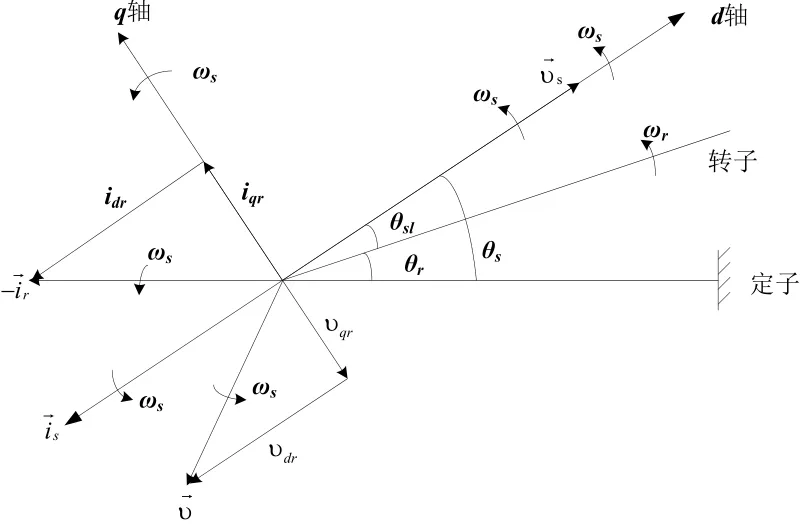
图1 定子电压定向控制的双馈电机空间矢量图Fig.1 Stator voltage oriented doubly-fed motor space vector
因为双馈轴带电机运行在单位功率因数下,定子电流矢量和→对齐,但是方向相反(双馈轴带电机此时工作在发电模式)。转子电压矢量和电流矢量通过转子侧变流器进行控制。转子电压矢量和电流矢量可沿着dq轴分解为两个分量,即分解为υdr和 υqr,分解为 idr和 iqr,这些dq轴分量可通过转子侧变流器独立进行控制。
双馈混合轴带系统可通过电磁转矩控制来实现转速控制或有功功率控制。和其他轴带系统相比,可以通过转子侧变流器控制双馈电机电磁转矩 Te、定子有功功率和无功功率 Qs。
双馈轴带电机的dq轴转子电流与定子有功功率 Ps和无功功率的关系可表示为式4:

上式表明,在给定定子电压后,定子有功功率和无功功率可通过dq轴转子电流来控制。
2 仿真研究
为了验证控制策略和主回路结构及参数的有效性,采用Matlab/Simulink搭建双馈混合轴带系统模型,并分析电机运行在轴带发电和并车推进工况下的运行状态。
2.1 双馈混合轴带系统仿真
为验证本文理论分析和系统建模的准确性,利用Matlab/Simulink搭建双馈混合轴带系统仿真模型结构如图2所示,仿真采用30 kW的双馈轴带电机,其参数如表1所示,仿真系统参数如表2所示。
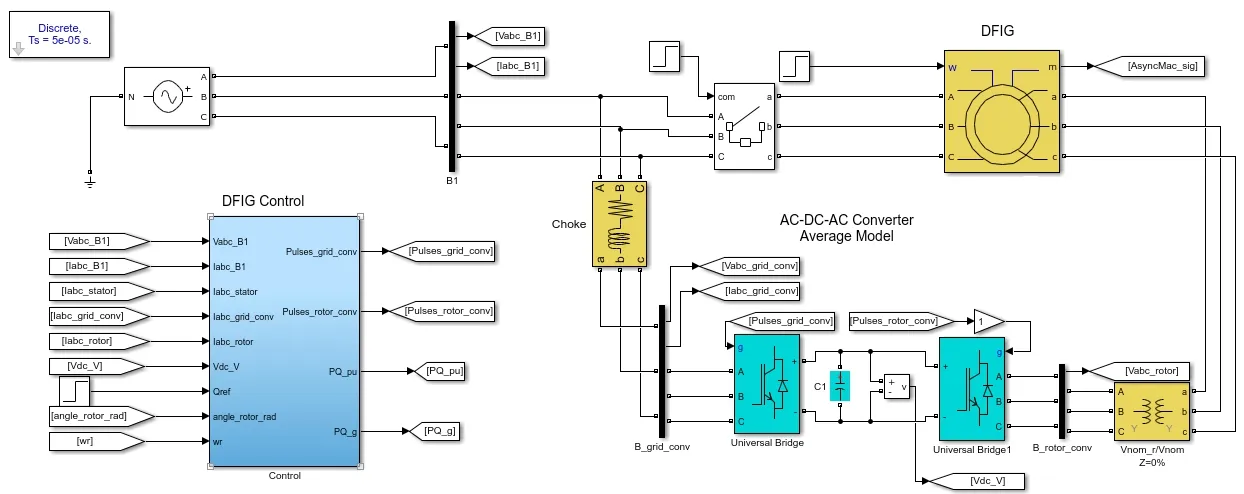
图2 双馈混合轴带系统仿真模型Fig.2 Simulation structure of doubly-fed shaft system

表1 双馈电机仿真模型参数Table1 Parameters of simulation model for doubly-fed motor

表2 双馈混合轴带系统仿真模型参数Table2 Parameters of simulation model for Doubly-fed shaft system
通过设置不同的双馈电机转速指令和有功、无功功率指令,使双馈混合轴带系统工作在的不同的工况下,记录并分析仿真结果。
2.2 双馈混合轴带系统仿真分析
系统仿真工况分为两部分,一是并网后改变双馈轴带电机转速,观察电机输出(有功、无功功率和定子电压、电流等)的变化;二是在固定转速,进行突然改变有功、无功功率的实验,观察电机输出的变化。以下仿真均忽略电机启动过程中各量的暂态过程,只考虑电机稳态运行时各量在不同工况下的变化。
2.2.1 变速恒频运行工况仿真
仿真给定电网电压400 V,电网频率50 Hz,电机处于空载运行状态。电机初始转速为1200 r/min(次同步),在1.2 s时,将转速给定调为1800 r/min(超同步)电压电流波形如下:

图3 转速变化时电机波形Fig.3 Waveforms of speed changing
由图3可知,电机空载运行时,定子电流幅值几乎为0 A。1.2 s时,电机加速,定子电流出现小幅波动,在1.22 s时,定子电流幅值又恢复为0 A。在电机加速过程中,定子电压的幅值、频率和相位始终稳定;由于1200 r/min和1800 r/min电机转差率绝对值相等,符号相反,所以加速后的转子电流幅值不变,相位反相,实现了电机在变速过程中恒压恒频发电。
2.2.2 负载突变工况仿真
设定仿真模型电机运行转速为1800 r/min,在1.4 s时,给定电机18 kW有功功率指令;在1.6 s时,给定电机6 kVar无功功率指令。观察电机定子电压、电流和转子电流变化情况。

图4 加载有功功率时电机波形Fig.4 Waveforms of loading active power
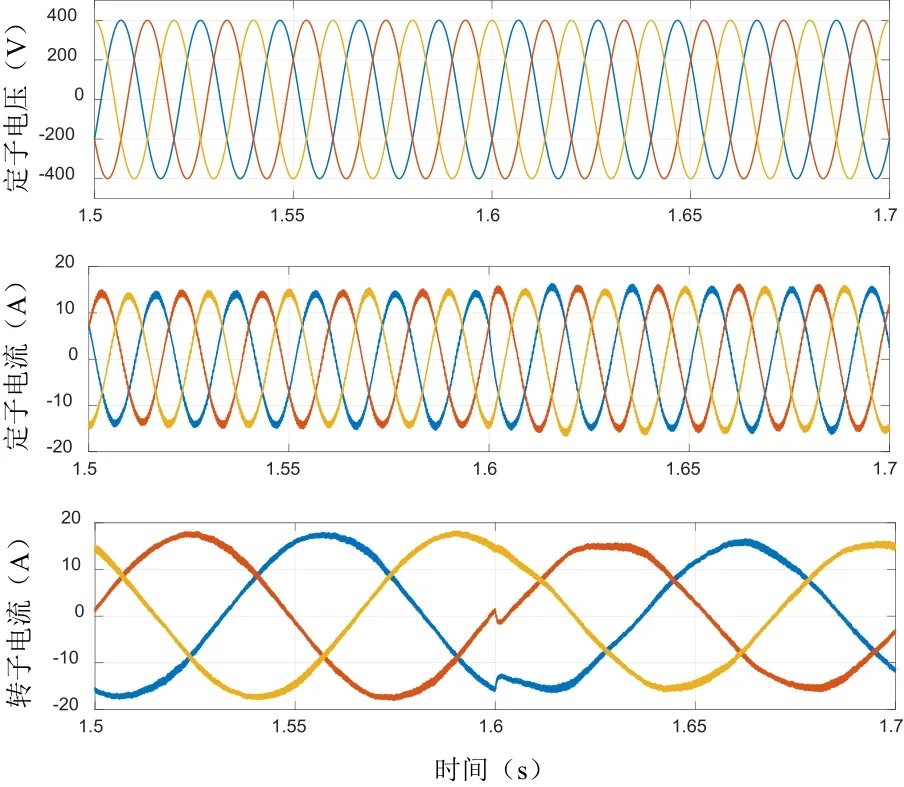
图5 加载无功功率时电机波形Fig.5 Waveforms of loading reactive power
如图4所示,在1.4 s时,给定电机18 kW的有功功率指令,加载过程中,定子电压相位、频率和幅值无明显波动;转子电流频率不变,幅值增大,相位延后,最终保持稳定。
如图5所示,在1.6 s时,给定电机6 kVar无功功率指令,加载过程中,定子电压相位、频率和幅值无明显波动;转子电流频率不变,幅值增大,相位超前,最终保持稳定。
综上,实现了在电机负载(有功、无功功率)突变时,电机实现恒压恒频发电。
3 实验研究
3.1 实验平台搭建
3.1.1 系统结构设计
双馈混合轴带系统实验台结构如图6所示,主电路部分由双馈轴带电机、变速恒频装置、并网接触器、原动机(感应电机)、变频器和EMI滤波器组成,各个主要设备的参数如表3所示。

图6 双馈混合轴带系统实验台结构图Fig.6 Structure of doubly-fed shaft system

表3 双馈混合轴带实验系统主要参数Table3 Parameters of the Doubly-fed shaft test system
3.1.2 硬件设计
变速恒频装置主要由机侧变流器、网侧变流器、控制板(DSP28335)、采样板、并网接触器和AC电抗器组成。采样板采集电压、电流信号后送到控制板,控制板经过计算后,输出控制信号,从而控制双馈混合轴带系统的运行。
网侧变流器采用有源前端(AFE),可实现能量的双向流动,规格为400 V/15 kW,实现单位功率因数控制和直流母线电压控制。
机侧变流器主板PCB的设计如图7所示,它集成了IGBT模块、光电隔离接口电路、IGBT驱动板直流电容和预充电回路等结构。接口电路将控制板输出的控制信号转化成IGBT的驱动信号(光电隔离),然后通过驱动板驱动IGBT将交流电逆变成所需的三相交流电压。变速恒频装置如图8所示,双馈混合轴带系统实验台如图9所示。
AC电抗器用来改善网侧电流波形,额定电压400 V,额定电流35 A,电感值为4.18 mH。

图7 机侧变流器主板PCB设计Fig.7 PCB design of the motherboard for the rotor side converter

图8 变速恒频装置Fig.8 Variable-speed constant-frequency equipment
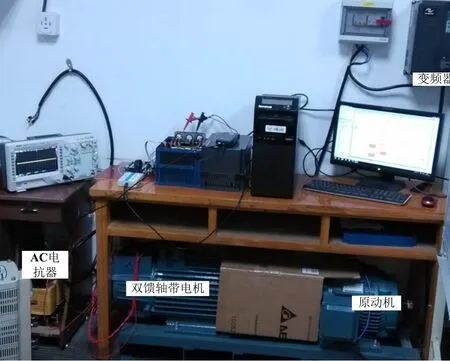
图9 双馈轴带系统实验台Fig.9 Doubly-fed shaft test system
3.1.3 软件设计
控制器选用TI公司的DSP28335,在CCS6.0环境里实现C语言编程,程序主要分为主程序、定时中断程序(PWM波控制、ADC采样和光电码盘采样等)两部分。主程序流程图如图10所示,其主体为无限循环检测,不断检测变流器各部分工作状态,主要实现系统流程的执行和故障保护(过压、过流)的功能。

图10 主程序流程图Fig.10 Flow diagram of the main program
定时中断程序在主程序无限循环检测里,该程序主要完成电压电流采样和AD转换、电机光码测速、控制机侧变流器实现电网电压跟踪并网以及变速恒频发电下的有功、无功功率解耦控制的功能,实现定子电压定向矢量控制。
3.2 实验验证
为了验证双馈混合轴带系统变速恒频装置的控制和硬件的有效性,进行空载并网(830 r/min)、轴带发电(800 r/min、880 r/min)和并车推进工况(880 r/min、1150 r/min)下的实验,实验结果及分析如下所述。
3.2.1 空载并网
首先,断开双馈轴带电机定子侧与电网之间的并网接触器,控制电机运行在830r/min;然后通过机侧变流器励磁,使电机定子侧电压幅值、相位和频率与电网电压完全一致;最后,闭合并网接触器,完成并网。
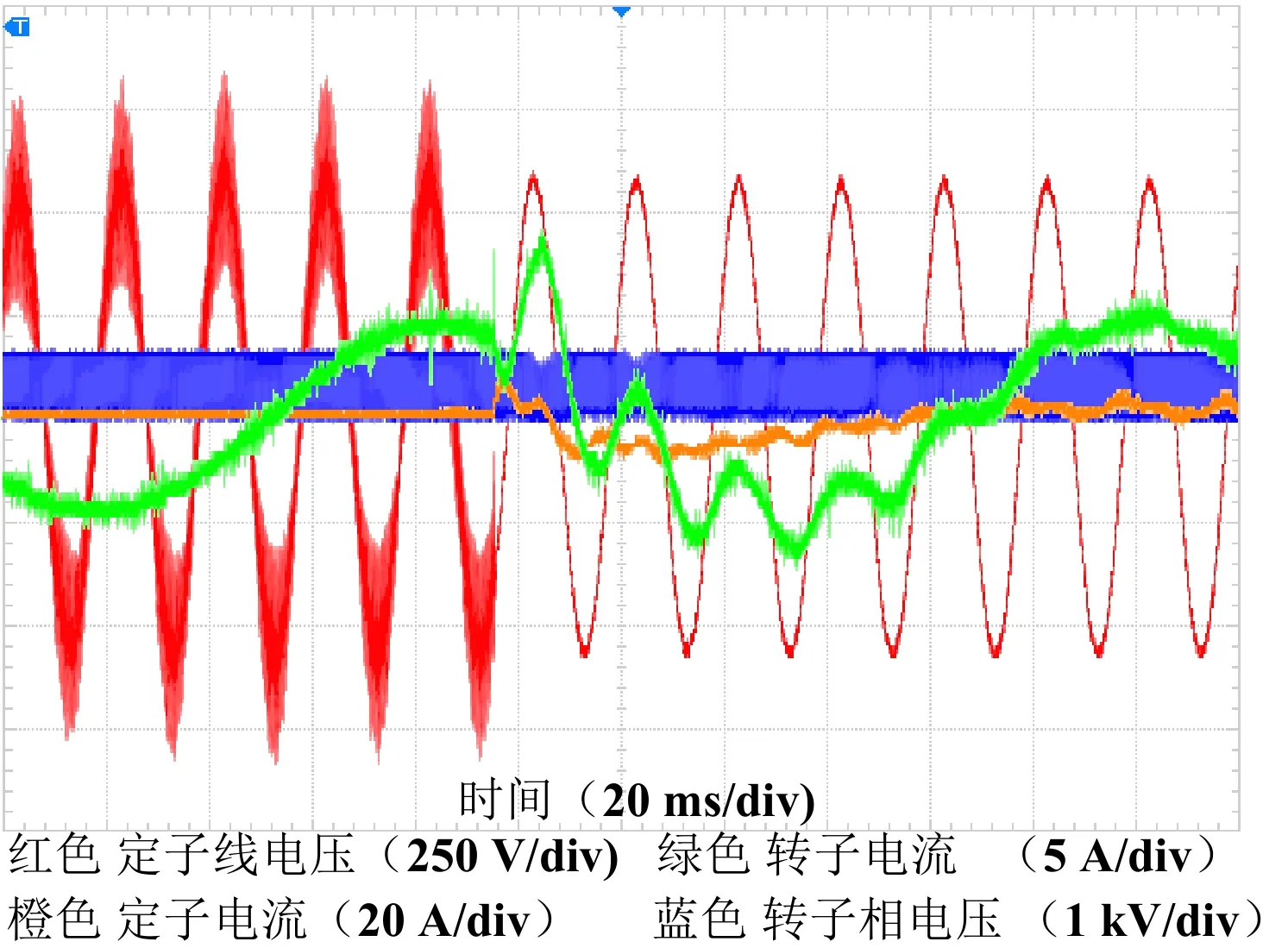
图11 空载并网波形Fig.11 Waveforms of motor hooked up to the grid without load
并网过程中电机定子电压、电流和转子电流波形如图11所示,并网过程中,定子电压幅值、相位和频率保持稳定,并网后定子电压更加平滑;转子电流受到冲击,在一个周波内又恢复稳定;定子电流有小幅振荡,但很快恢复了稳定。综上,并网冲击不大,并网完成。
3.2.2 轴带发电
双馈轴带电机与电网实现并网后,进行轴带发电实验。在转速为800 r/min时,给出P= 0 Kw、Q=1.6 kVar功率的指令,波形如图12;在转速为880 r/min时,给出P= 4.3 kW、Q=0 kVar的功率指令,波形如图13。
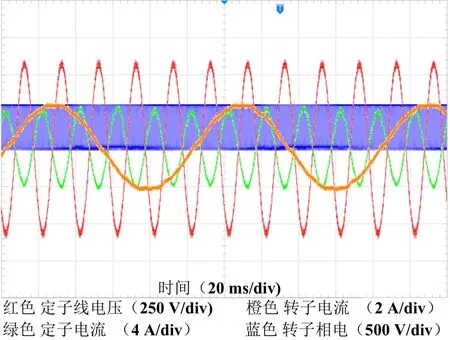
图12 转速800 r/min时,P=0 kW,Q= 1.6 kVarFig.12 Speed at 800 r/min, P= 0 kW, Q=1.6 kVar
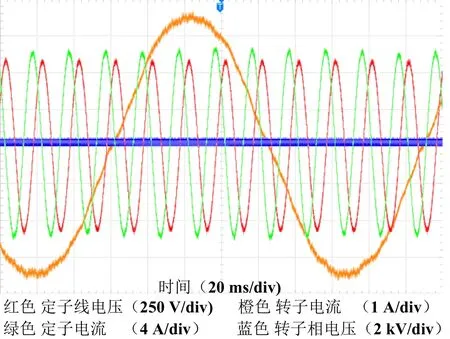
图13 转速880 r/min时,P= 4.3 kW,Q= 0 kVarFig.13 Speed at 880 r/min, P= 4.3 kW, Q=0 kVar
图12、13对比可知,电机在不同转速、不同功率指令工况下,定子电压频率、幅值和相位均没有明显变化,定子电流的相位和幅值受有功、无功功率的影响;转速变化时,转子电流的频率随随转差频率同步变化,以确保定子电压频率始终为50 Hz。综上,在双馈轴带电机转速改变过程中,双馈混合轴带系统实验台实现了恒频恒压发电。
3.2.3 并车推进
完成轴带发电实验后,进行并车推进实验。电机次同步运行时,电机转速为880 r/min,给出P=-4.3 kW、Q= 0 kVar的功率指令,波形如图14。电机超同步运行时,电机转速为1150 r/min,给出P=-5.7 kW、Q= 0 kVar的功率指令,波形如图15。

图14 转速880 r/min时,P= -4.3 kW,Q= 0 kVarFig.14 Speed at 880 r/min, P= -4.3 kW, Q=0 kVar

图15 转速1150 r/min时,P= -5.7 kW, Q= 0 kVarFig.15 Speed at 1150 r/min, P= -5.7 kW, Q=0 kVar
由图14、15可知,电机并车推进工况运行稳定,电机转速变化时定子电压频率、幅值和相位均无明显变化。电流转子电流频率随转差频率同步变化,以确保定子电压频率始终为50 Hz。双馈混合轴带系统的并车推进实验完成。
4 结论
为研发双馈混合轴带系统变速恒频装置,本文首先利用Matlab/Simulink搭建了一个30 kW双馈混合轴带系统模型,验证了算法和主回路参数设计的合理性;然后根据仿真参数搭建了一套7.5 kW双馈混合轴带系统变速恒频装置;最后通过轴带发电(有功、无功功率)和并车推进实验,验证了变速恒频装置运行的稳定性和可靠性。根据仿真及实验结果,可得出如下结论:
1) 双馈混合轴带系统矢量控制(定子电压定向)效果好,并网冲击小,可以完成与船载电网(柴油发电机)并网;
2) 双馈混合轴带系统可实现轴带发电(有功、无功功率)和并车推进两种工况;
3) 双馈混合轴带系统在电机转速变化过程中,定子电压频率、幅值和相位均无明显变化,可实现恒压恒频发电。
参考文献
[1] 胡捷. 基于SPWM逆变器的轴带发电机系统研究[D]. 上海: 上海海事大学, 2006.HU Jie. Research on the shaft system based on a SPWM modulated inverter [D]. Shanghai: Shanghai Maritime University,2006.
[2] SARIGIANNIDISA, KLADASA, CHATZINIKOLAOUE, et al. High efficiency Shaft Generator drive system design for Ro-Ro trailerpassenger ship application [C]//International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles. IEEE, 2015:1-6.
[3] HANSENJF, WENDTF. History and State of the Art in Commercial Electric Ship Propulsion, Integrated Power Systems, and Future Trends[J]. Proceedings of the IEEE, 2015, 103(12):2229-2242.
[4] 李亮, 刘以建, 江华, 等. 基于全控型PWM变流器的船舶轴带发电机系统研究 [J]. 舰船科学技术, 2009, 31(7): 51-55.LI Liang, LIU Yi-jian, JIANG Hua, et al. The research of a new shaft generator system on the ship based on the whole controlled PWM rectifier [J]. Ship Science and Technology, 2009, 31(7): 51-5
[5] 孟永奇, 李保来, 兰建军.船舶轴带发电-电动系统的原理及控制研究 [J]. 船电技术, 2011, 31(8): 35-44.MENG Yong-qi, LI Bao-lai, LAN Jian-jun. Principle and control of ship’s shaft-driven generator-motor system [J]. Ship Electric Technology, 2011, 31(8): 35-44.
[6] MULLERS, DEIEKEM, DEDONEKER RW.Doubly-fed induction generator systems for wind turbines [J].IEEE Industry Application Magazine, 2002, 8(3): 26-33.
[7] 王传东,向大为,王腾.双馈风机转子侧变流器电热特性分析 [J]. 新型工业化,2015,5(10): 21-26.WANG Chuan-dong, XIANG Da-wei, WANG Teng. Analysis of Electric and Thermal Characteristics of Rotor-Side Converter of the Doubly-fed Induction Generator System[J]. The Journal of New Industrialization, 2015, 5(10): 21-26.
[8] 谷雅琼,于惠钧,邓栋,等.基于MATLAB的风力发电机组低电压穿越仿真 [J]. 新型工业化,2014,4(10): 18-22.GU Ya-qiong, YU Hui-jun, DENG Dong, et al.Wind Turbine Generator Low Voltage Ride Through Based on MATLAB [J].The Journal of New Industrialization,2014,4(10):18-22.
[9] 高海波,陈明昭,陈辉. 船舶轴带发电机系统的仿真设计与建模 [J]. 系统仿真学报, 2002,14(6): 806-808.GAO Hai-bo,CHEN Ming-zhao,CHEN Hui. Design and modeling of the ship shaft generator simulator[J]. Journal of System Simulation,2002,14(6): 806-808.
[10] 王龙,艾钢,刘赟. 双馈式船舶混合轴带系统多模式平滑切换控制技术研究 [J]. 新型工业化, 2017, 7(9): 47-52.WANG Long, AI Gang, LIU Yun. Mode Switching Control Technique of Ship Shaft Generator System with Doubly-fed Induction Machine[J]. The Journal of New Industrialization, 2017, 7(9): 47-52.
[11] 薛士龙. 船舶电力系统及其自动控制 [M]. 北京: 电子工业出版社,2012: 25-27.XUE Shi-long. Ship power system and automatic control [M]. Beijing: Electronics Industry Press,2012: 25-27.
[12] WU B,LANG Y,KOURO S,et al. Power Conversion and Control of Wind Energy Systems[M]. IEEE Press, Wiley, 2011.
[13] LIU C,BLAABJERG F,CHEN W,et al. Stator current harmonic control with resonant controller for doubly-fed induction generator[J].IEEE Transactions on Power Electronics,2012,27(7): 3207-3220.
[14] 冯玉龙. 船舶轴带双馈机组变速恒频控制器设计与系统仿真研究 [D]. 上海: 上海船用柴油机研究所,2014.FENG Yu-long. Research on system simulation and design for variable Speed and fixed frequency controller of doubly-fed shaft generator[D].Shanghai: Shanghai Marine Diesel Engine Research Institute,2014.
[15] 周苗升,孙旭东,柴建云,等.双馈异步轴带发电机的控制与研究 [J]. 清华大学学报(自然科学版),2008,48(4): 465-468.ZHOU Miao-sheng,SUN Xu-dong,CHAI Jian-yun, et al. Research on doubly-fed induction ship generator[J]. Journal of Tsinghua University(Natural Science Edition),2008,48(4): 465-468.
[16] BATLLE C, CEREZO AD, ORTEGA R. A Stator Voltage Oriented PI Controller For The Doubly-Fed Induction Machine[C]// American Control Conference. OAI, 2007:5438-5443.