单脉冲测量雷达数据滤波算法研究
2018-05-16蒋立民
蒋立民
(91245部队,辽宁葫芦岛,125000)
0 引言
数据处理系统是雷达系统的重要组成部分。数据处理系统在获取雷达信号处理产生的测量数据后,对所收到的测量数据主要进行分析判断、相关处理、滤波与预测、平滑、外推等,最终实现对目标的稳定连续跟踪和对目标状态的精确估计。其处理的关键技术在于测量数据组织、相关和滤波算法的实现。本文只针对其中的滤波处理进行了研究,滤波处理主要用于解决测量数据的不精确性和被测量目标状态的跟踪与预判,目前常用的滤波算法主要包括α-β滤波、Kalman滤波和最小二乘法,通过分析三种算法的原理,并比较其优点有助于实践应用者在选择算法时做出最合理的选择。
1 滤波算法原理
1.1 最小二乘法
最小二乘法的滤波原理是:根据采集到的数据组(xi, yi),其中i等于(1,2···,n),选定近似函数形式,即给定函数类H,求解ϕ(χ)∈ H ,即

使得式(1)为最小,即

通常在单脉冲雷达数据处理中一般选用多项式拟合对给定数组(xi−yi)求一个m(m<n)次多项式,即

使得

为最小,选取参数 ai(i = 0 ,1,···,m ),使得

式(5)中,H为至多m次多项式的集合。Pm(χ)称为这组数据的最小二乘m次拟合多项式。由多元函数取极值的必要条件,得

式(6)即是最小二乘拟合多项式的系数 ak( j =k = 0 ,1,···,m)应满足的方程组,由函数组{1 , χ,χ2,· · ·,χm}的线性无关性可以得证式(6)存在唯一解,且解所对应的多项式 Pm(χ)必定是给定数组(xi, yi)的最小二乘拟合多项式。
1.2 Kalman滤波
在单脉冲雷达测量过程中,根据雷达获得的前两次测量值z1和 z2求得Kalman滤波的状态初值,即有

假设测量噪声ω是一个具有平稳方差2wσ的零均值高斯随机变量,且与过程噪声和初始条件无关,则可以推导出相应的协方差矩阵2/2P ,即为

按照滤波协方差矩阵初始值,计算预测协方差矩阵,可得

若已知Kalman增益

则可按照下式计算滤波协方差。

由状态滤波值和状态转移矩阵,按下式可计算状态预测值,即为

由状态预测值、测量值和Kalman增益就可以计算Kalman滤波值,即为

1.3 α-β 滤波
当被测量目标运动方程采用速度模型时,其滤波增益矩阵为常数矩阵,为 K =α β/TT,即α-β 滤波。根据给定的过程噪声和测量噪声可以按Kalman滤波方程得出α、β与各个已知参数之间关系式。
假设过程噪声的协方差矩阵,测量噪声方差为,即
根据式(14)和式(15)以及相应的 Kalman方程,可得到αβ、与过程噪声、测量噪声的关系式,即

式中 λ =,在实际应用过程中,根据σw与σa的取值不同,可以算出α、β的值,因此有效的确定σw与σa的值是实现α-β滤波的关键。
2 算法验证及结果比较
为了验证算法的正确性,在某型单脉冲雷达的数据处理过程中加入α-β滤波、Kalman滤波和最小二乘法滤波,实践中可根据不同情况选择不同滤波方式。过程中采集测量数据中的方位角数值和距离数值,凝聚二维点迹,根据点迹线性特征对比不同滤波效果,具体流程如图1所示。

图1 滤波算法应用流程图
验证过程中,单脉冲雷达分别跟踪直线飞行、转向的直线飞行和机动飞行的空中目标,应用α-β滤波、Kalman滤波和最小二乘3种算法滤波处理,分析比较3种情况的距离、方位的均方差和点迹图。

图2 原始点迹
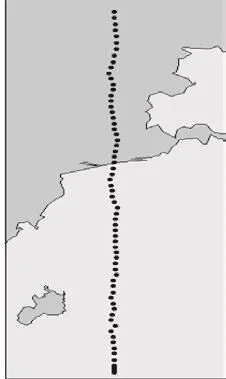
图3 最小二乘滤波
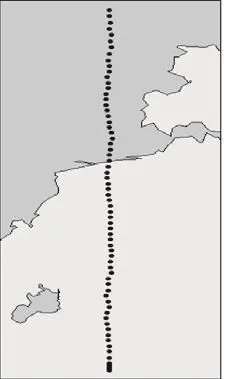
图4 Kalman滤波
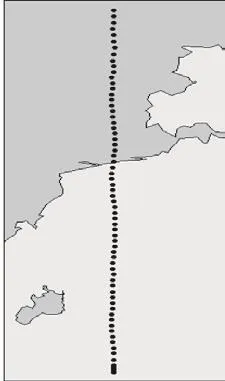
图5 α-β滤波
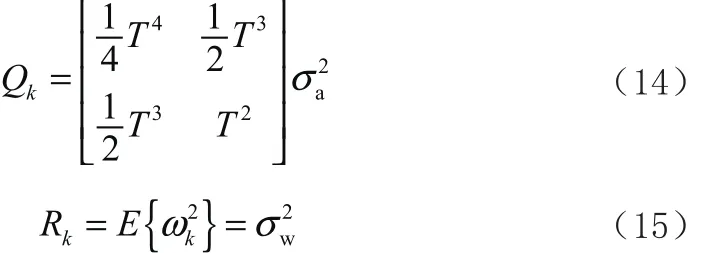
图2 ~图5分别为跟踪直线飞行目标情况下的目标原始点迹、应用最小二乘法滤波后点迹、应用Kalman滤波法滤波后点迹、应用α-β滤波法滤波后点迹,3种滤波算法对应的均方差值如表1所示。

表1 直线飞行目标3种滤波算法均方差值比较
从图2~图5及表1可以看出,α-β滤波算法应用于直线运动目标时跟踪滤波效果最好。
图6~图9分别为跟踪改变航向直线飞行目标情况下的目标原始点迹、应用最小二乘法滤波后点迹、应用Kalman滤波法滤波后点迹、应用α-β滤波法滤波后点迹,3种滤波算法对应的均方差值如表2所示。

图6 原始点迹

图7 最小二乘滤波后点迹

图8 Kalman滤波后点迹

图9 α-β滤波后点迹

表2 变航向的直线飞行目标3种滤波算法均方差值比较
从图6~图9及表2可以看出,α-β滤波算法应用于变航向的直线运动目标时跟踪滤波效果仍最好,这说明其具有较强的适应性。
图10~图13分别为跟踪机动飞行目标情况下的目标原始点迹、应用最小二乘法滤波后点迹、应用Kalman滤波法滤波后点迹、应用α-β滤波法滤波后点迹,3种滤波算法对应的均方差值如表3所示。
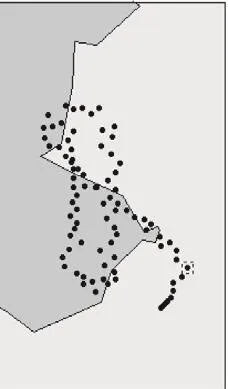
图10 原始点迹
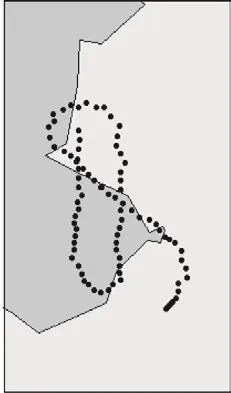
图11 最小二乘滤波

图12 Kalman滤波
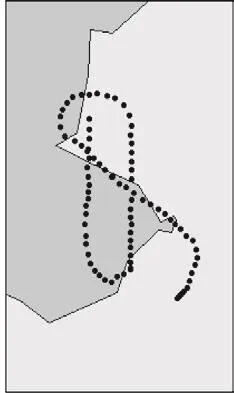
图13 α-β滤波

表3 机动飞行目标3种滤波算法均方差值比较
从图10~图13及表3可以看出,Kalman滤波算法应用于机动飞行目标时跟踪滤波效果最好。
从上面3种应用比较情况看,α-β滤波算法适用于直线运动目标,滤波效果较好;Kalman滤波算法适用于机动运动目标,滤波效果较好;而最小二乘滤波算法一般误差较大,一般不单独使用,仅在跟踪中用作辅助预判。
3 结束语
通过上述滤波算法研究与实践应用对比,证明了滤波算法对提高单脉冲雷达跟踪效果、提高测量数据精度具有重要作用;同时分析对比情况说明了3种滤波算法的各自特点以及适用的情况,有助于实践应用者在选择算法时做出最合理的选择。
参考文献
[1]孙祥龙,张祖稷.雷达数据处理[M].北京:国防工业出版社,1988.
[2]徐士良.计算方法[M].北京:人民邮电出版社,2009.
[3]胡世祥,段双泉.外弹道测量数据处理[M].北京:国防工业出版社,2002.
