满堂扣件式钢管脚手架安全监测系统的研究
2018-05-15胡乾传夏巍刘闰豪
胡乾传,夏巍,刘闰豪
(安徽建筑大学 电子与信息工程学院,安徽 合肥 230601)
0 引言
随着经济的发展,脚手架的使用量日益增多,受扣件的质量、管理水平等因素影响,随之而来的脚手架施工中的坍塌事故也越来越多,给人员生命和财产带来了重大损失。近年来,脚手架的安全问题得到了越来越多的关注。
目前,在脚手架安全方面的研究已取得了大量的成果。郭佳、何铭华等[1]以实际工程为例,提出了一种新型碗扣式钢管脚手架位移监测系统,对预警进行了分级,对脚手架可能存在的安全隐患实时监测与预警。水博和于军琪[2]提出用无线监测技术对脚手架进行监测,通过对数据处理与分析,当监测数据超过预警值发出预警信号。武雷等[3]采用BIM技术对脚手架进行了安全管理,解决了脚手架可能存在的安全隐患问题。朱潇等[4]提出了基于移动IT技术的外脚手架安全监测系统,通过对监测数据采集和分析,人员可以及时判断外脚手架安全状况。于清缘和陈立中[5]分析了我国脚手架施工中的安全事故,同时借鉴国外相关经验提出了安全性更高的新型脚手架,建立合理有效的监督职能体系和安全职业培训等一系列解决方案。陈述、望运龙[6]通过分析脚手架安全施工的各种影响因素,给出了脚手架作业事故树结构图,计算得出脚手架事故发生的概率大小。Wu等[7]提出了基于RFID技术的自组织实时追踪系统的框架,用于对潜在安全事故的分析与预警。Kim和Ahn[8]利用BIM技术,通过对重要数据的收集,并在规划阶段使用它,建立了脚手架安全评估系统。
传统的脚手架监测主要依靠人工监测来完成的,人工监测存在很多问题,劳动强度大、效率低、成本高、监测范围小。目前物联网已成为计算机科学领域一个活跃的研究分支,为脚手架的安全实时监测提供了技术支持。本文提出了一种基于物联网技术的满堂扣件式钢管脚手架安全监测系统,对脚手架存在的安全隐患实时监测,当监测数据超过预警值,通过短信告知人员,从而实现脚手架的安全监测与预警。
1 系统结构及原理
本文设计的满堂扣件式钢管脚手架安全监测系统主要有数据采集部分、数据传输部分以及上位监控中心三大部分构成。应用激光位移传感器和MPU6050对脚手架的位移、冲击加速度和偏移角度等参数监测,APC220-43无线通讯模块接收从各个监测节点发送过来的数据,并通过GPRS及时地远程传送给监测中心,采用Java编程开发系统软件,在Web浏览器上对脚手架的位移、加速度、偏移角度进行显示,并且设置相应预警值,当监测数据超过预警值,通过短信告知人员。系统总体结构如图1所示。
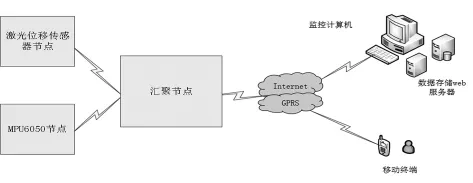
图1 满堂扣件式钢管脚手架安全监测系统结构图
系统的底层为监测层,用于脚手架的位移、冲击加速度和偏移角度等参数的获取,它主要由传感器节点组成。首先需要选择要监测的几个点,对脚手架的每一层都进行监测,将传感器连接在脚手架钢管上。根据《建筑施工扣件式钢管脚手架安全技术规范》计算出满堂扣件式钢管脚手架预警值。激光位移传感器监测脚手架的位移,在施工现场监测满堂扣件式钢管脚手架的位移,需将激光位移传感器固定安装。将设定脚手架激光位移传感器多次测量固定位置距目标满堂扣件式钢管脚手架的距离,求得平均值设为D1,在后期对满堂扣件式钢管脚手架位移的监测距离设为D2,则△D为满堂扣件式钢管脚手架的位移。对满堂扣件式钢管脚手架的冲击加速度和偏移角度进行监测,需要在满堂扣件式钢管脚手架上安装MPU6050,用于监测满堂扣件式钢管脚手架的x轴加速度、Y轴加速度、Z轴加速度、x轴倾角、Y轴倾角、Z轴倾角。将MPU6050的数据通过无线通讯模块传送至网关监测系统。最后将激光位移传感器和MPU6050对脚手架的位移、冲击加速度和偏移角度监测数据实时在监测系统的软件上显示。
系统的中间层是数据的传输部分,由无线通讯网关组成。下行通讯由APC220-43无线通讯模块组成,负责对数据的采集控制、接收处理;上行通讯由GPRS模块组成,下行通讯接收到的数据发送到管理与预警平台。
最上层即为远程监控中心,管理和预警平台通过GPRS模块SIM900A接收到的网关上传数据,在Web浏览器上对脚手架的位移、加速度、偏移角度进行显示,并且设置相应的预警值,当监测数据超过预警值,通过短信告知人员。
2 系统的硬件设计
2.1 监测节点设计
监测节点由激光位移传感器、MPU6050、PIC18F4520单片机、APC220-43模块、电源模块。监测节点的系统结构如图2所示。
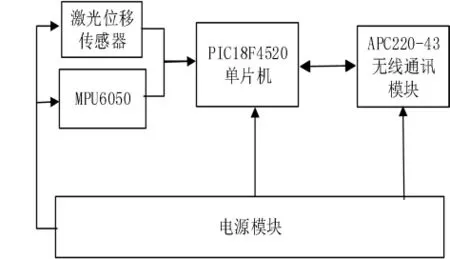
图2 监测节点结构图
微处理器采用Microchip公司生产的PIC18F4520型号单片机,PIC18F4520具有低功耗、速度快、全静态设计、可以C语言编程等特点。具有32KB闪存程序存储器和13路10位A/D、另外还有CCP/ECCP模块。该微处理器的基本功能对获取的数据进行基本的处理。
本系统选用的激光位移传感器,为GHLM07C模块,在施工现场监测钢管脚手架的位移,需将该激光测距传感器固定安装。GHLM07C模块上电以后处于待机状态,通过RS232发送测量命令。
加速度计选用的是MPU6050,采取微处理器读取MPU6050的测量数据信息,然后通过串口发送出去,同时避免了自身开发复杂庞大的通信协议。此模块内部集成了电压稳定电路,同时可以适配3.3V/5V的嵌入式系统,利于接入。另外此模块选用高效的数字滤波技术,能够有效降低测量的噪声,同时改善测量精度。MPU6050模块内部继承了动态卡尔曼滤波算法,可以在复杂多变的动态环境下,精确的输出模块的实时状态,测量精度可高达0.01度,并且输出稳定,是一个低成本的适用于各种场合的传感器。
无线通讯模块采用的是APC220-43,APC220-43是高度集成微功率无线数据传送模块,其内部嵌入了高性能微处理器以及高速度射频芯片。APC220-43模块为用户提供了多种多样的选择频道,此模块可以透明的传送各种长度大小的数据信息,并且用户自身不必编写庞大复杂的程序。另外由于模块具有远距离传输数据,软件设置也简单多样,从而使之在各种领域都具有普遍的应用。APC220-43模块主要通过串口通信。本系统中,APC220-43模块需要与每个节点以及主控板相连,将传感器采集的数据打包发送给主控板的功能。
激光位移传感器7-30V供电电压,MPU6050模块3.3V供电电压,APC220-43模块5V供电电压。
2.2 网关节点设计
网关节点完成对数据的收集汇总,主要由无线通信模块、处理器模块、GPRS模块、电源模块等组成。网关节点的结构如图3所示
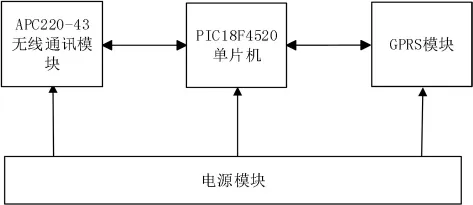
图3 网关节点结构图
为了提高节点的通用性和减少系统的设计成本,无线通信模块与微处理器任然采用APC220-43模块与PIC18F4520来实现数据的接收与处理。GPRS模块选用SIM900A,SIM900A内嵌TCP/IP协议,该模块有AT指令集接口,PIC18F4520将采集的数据发给SIM900A模块,最后SIM900A模块把信息发送到设定的手机号上,此过程实现信息的发送与接收。
3 系统软件设计
3.1 监测中心平台
传感器采集的数据经过处理以后,监测中心将这些数据显示给用户,监测系统的使用是面向用户的,监测软件的开发至关重要,监测中心软件将需要保存的数据定时传送到数据库中,提供查询服务。整个平台采用B/S模式开发,监测中心的系统软件主要有主界面模块、登录界面模块、注册模块、数据查询模块、预警设置模块5部分组成。该系统软件经过验证已经能够成功运行。图4为满堂扣件式钢管脚手架安全预警系统中脚手架的位移、加速度、偏移角度的实时采集数据显示界面。
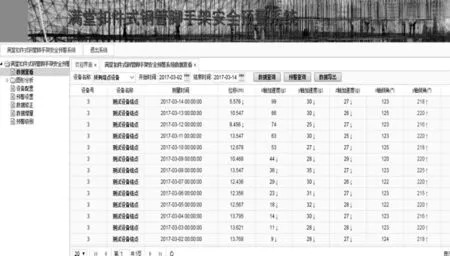
图4 满堂扣件式钢管脚手架安全预警系统监测数据显示界面
3.2 监测预警值的确定
本文设计的满堂扣件式钢管脚手架安全预警系统对脚手架的位移、加速度、偏移角度进行预警,给出了预警值的上限,满堂扣件式钢管脚手架的位移、加速度、偏移角度预警值见表1。
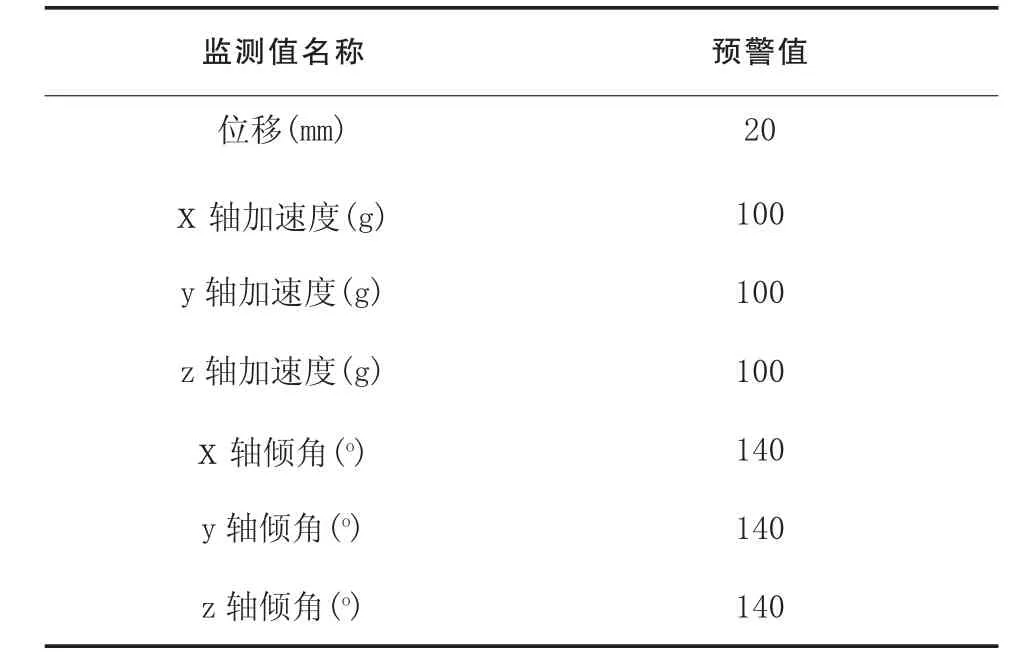
表1 满堂扣件式钢管脚手架预警值
3.3 系统软件的运行平台和开发工具
该系统软件采用B/S架构,系统软件的运行平台采用Windows 7,用Eclipse开发软件程序,MySQL进行数据库的设计,服务器选用Apache Tomcat7.0。整个系统软件的设计和开发使用了面向对象的方法和技术,体现了可视化的友好的人机界面。
3.4 系统软件工作流程
首先对系统进行初始化,进行基本的系统设置,当读取数据的周期到来时,将读取的数据提取出来,并将该结果显示出来,同时把数据存入数据库,并根据显示结果调用相应模块,如果数据超过设置的预警值,记录超限值并通过短信告知人员。图5为系统软件工作流程。
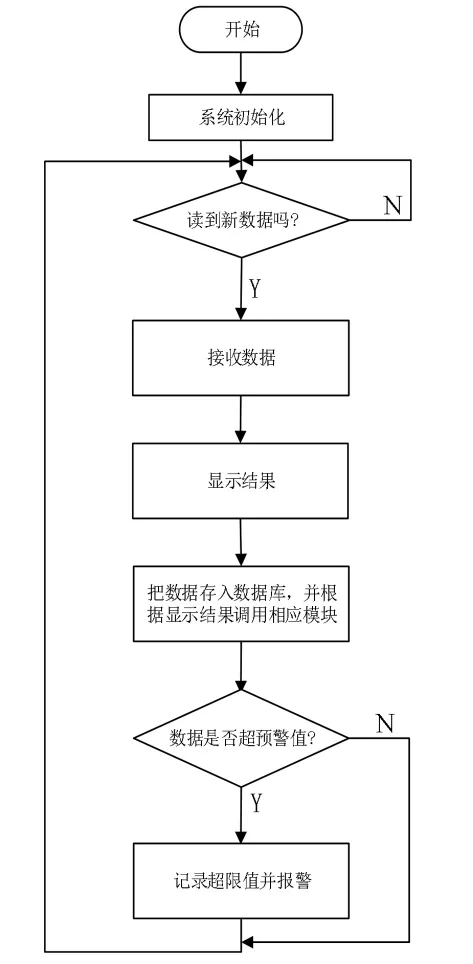
图5 系统软件工作流程图
4 结论
本文提出了基于物联网技术的满堂扣件式钢管脚手架安全监测系统的结构和设计方案。选择合适的处理器模块、传感器模块、无线通信模块、GPRS模块元器件,并设计了监测节点和网关节点结构图,同时设计了满堂扣件式钢管脚手架安全预警系统监测数据显示界面,给出了监测预警值和系统的软件流程,从而满堂扣件式钢管脚手架安全监测与预警实现智能化。该系统具有很高的实用价值,由于它可以在恶劣的环境下实现低功耗的长时间监测,一方面可以提高生产效率和安全性,降低生产成本,另一面还可以降低劳动者的生产强度,从而带来巨大的经济效益与社会效益。
[1]郭佳,何铭华,殷治宁,等.碗扣式钢管脚手架位移监测系统研制及预警值确定[J].公路工程,2014,39(6):316-320.
[2]水博,于军琪.无线通信技术的脚手架安全监测系统初探[J].中国建筑金属结构,2013(3):84-86.
[3]武雷,邵明民,夏聘.BIM技术在脚手架安全管理中的应用研究[J].施工技术,2016,45(18):15-17.
[4]朱潇,薛小龙.基于移动IT的外脚手架安全实时监测方法与应用研究[D].哈尔滨:哈尔滨工业大学,2014.
[5]于清缘,陈立中.借鉴国外发展经验减少我国脚手架工程事故[J].工业建筑2011,41(1):37-40.
[6]陈述,望运龙.基于事故树分析的脚手架作业安全评价[J].工业安全与环保,2015,41(5):82-85.
[7]Wu W,Yang H,Chew D A S,et al.Towards an autonomous real-time tracking system of near-miss accidents onconstructionsites[J].Automation in Construction,2010,19(2):134-141.
[8]Kim H,Ahn H.Temporary Facility Planning of a Construction Project Using BIM (Building Information Modeling)[C]//International Workshop on Computing in Civil Engineering.2011:627-634.
