一种改进的空间滤波除噪算法在道路识别中的运用
2018-05-14陈俞玮应骏王沛
陈俞玮 应骏 王沛

摘要: 提出了一种在道路边缘像素连续的前提下,运用空间滤波方法除去道路图像中央的噪声的新算法,从而使得机器人在直线道路情况下能够清晰地识别出路和非路的部分.通过实验比较,结果表明该算法能够得到较好的除噪和道路拟合效果.
关键词:
空间滤波; 噪声去除; 道路识别
中图分类号: TN 919.8文献标志码: A文章编号: 10005137(2018)02025805
Application of an improved spatial filtering denoising
algorithm in road recognition
Chen Yuwei, Ying Jun*, Wang Pei
(The College of Information,Mechanical and Electrical Engineering,Shanghai Normal University,Shanghai 200234,China)
Abstract:
A new algorithm based on the idea of spatial filtering is proposed to remove the central noise of the road images under the premise of continuous pixels on the road edge,so that the robots can clearly identify the way out and the nonway part in the case of straight road.The experimental results show that the algorithm has better denoising and road fitting effect.
Key words:
spatial filtering; noise elimination; road recognition
收稿日期: 20171025
作者簡介: 陈俞玮(1994-),女,硕士研究生,主要从事数字图像处理方面的研究.Email:chen_yuwei@163.com
导师简介: 应骏(1973-),男,博士,硕士生导师,主要从事嵌入式、视频信号的压缩与处理方面的研究.Email:junying@shmiic.com
*通信作者
引用格式: 陈俞玮,应骏,王沛.一种改进的空间滤波除噪算法在道路识别中的运用 [J].上海师范大学学报(自然科学版),2018,47(2):258-262.
Citation format: Chen Y W,Ying J,Wang P.Application of an improved spatial filtering denoising algorithm in road recognition [J].Journal of Shanghai Normal University (Natural Sciences),2018,47(2):258-262.
随着无人驾驶研究的深入,机器视觉下道路边界识别的精确性要求越来越高[1],对于图像噪声的处理显得尤为重要.但是,由于种种条件限制及随机干扰,成像系统获取的原始图像经过预处理分割后,很难去除所有的噪声,噪声的存在会恶化图像的质量,甚至淹没需要检测的特征,增加道路边界的分析难度,降低道路识别的准确性.
文献[2]依据道路边界的先验知识与预测知识进行道路边界的识别,文献[3]依据自然边界不易受到污染的现象提出了道路边缘检测的方法,文献[4]首先建立了直线边界模型,再利用道路边界的领域特征从图像中识别出道路边界,文献[5]引入蚁群算法,利用信息素的正反馈作用,确定边界参数及模型参数,进行边缘识别,文献[6]依据证据理论,利用局部区域提取方向、道路边界梯度与灰度3个特征进行道路边界识别,提升算法对于光照的适应性.
上述文献采用的识别算法较繁琐,对单幅图像中道路边缘识别准确率较高,但对算法的实时性较低.针对机器人采集并预处理后的图像,本文作者提出了一种改进的空间滤波除噪算法,并结合一种新的道路边界拟合方法,简化了算法的过程并提高了算法实时性.
1算法的设计
1.1空间滤波的传统算法
空间滤波是由对一个邻域内的图像执行的预定义操作组成.在图像空间中借助空间滤波器对图像进行邻域操作,根据模板对输入像素相应邻域内的像素值计算得到输出像素的取值[7].
1.2改进空间滤波算法的设计
降低噪声的滤波器大多使用平滑滤波器,其主要用于模糊处理和降低噪声方面,可以在目标提取之前去除图像中的一些噪声和琐碎细节.
对图像预处理并二值化后,基于计算道路边缘连续的情况下,确保滤除噪声时不会对于道路边缘造成影响.假设原始图像的道路边缘部分像素Z1,以滤波器系数W1进行平移,通过依次计算由滤波器覆盖下相应图像的响应特性R1,通过比较得出R1最小值
R1,min=min{R1|R1=ZT1W1},
(1)
然后判断道路中央噪声部分.由于噪声是比较分散,面积比较小,因此判断响应特性小于R1,min的像素部分为噪声,其像素值置为0.
接着,为了提高精度,对于第一次未清除掉的噪声进行二次模板卷积,划分感兴趣区域(ROI),并对该区域进行二次滤波.
1.3基于改进滤波算法下的道路直线拟合新算法
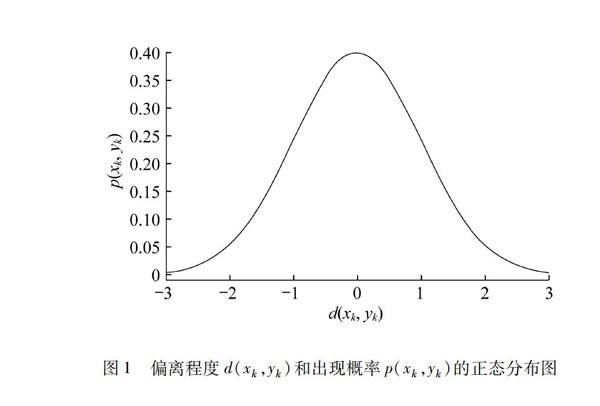
本文作者提出一种新的对图像中像素采用按列扫描点集的直线拟合算法,图像以y方向,自下而上依次扫描每一列最下面非0像素点,从而形成代表道路的点集 (x,y),(xk,yk)为该点集中k点的坐标.为了提高直线拟合的精确度,首先采用最小二乘法做出直线,将直线与点之间进行距离判断.假设偏离程度与出现概率呈现正态分布,其模型如图1所示,当道路点集出现概率趋向于0时,认为其为偏离较大的像素点,去掉该点集,像素值f(xk,yk)置为0,再次对非0像素点进行最小二乘法直线回归.
2实验结果与分析
2.1图像预处理
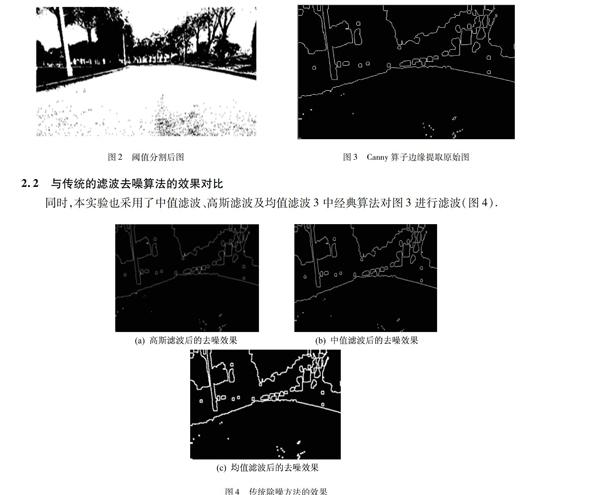
首先,将turtlebot2机器人安装摄像机作为图像采集源,在上海师范大学奉贤校区内进行视频采集,识别每帧图像的平均总耗时42 ms,实时性达到系统要求.采集序列中的第n帧640 pixels×480 pixels的图片,对其进行基于直方图分割,由于光线和亮暗等原因,造成分割效果不佳,产生了一些噪声(图2).接着对其进行形态学上关于边缘的修复.像素连续的条件下,选择对其进行Canny算子的边缘提取,其上下限阈值分别设置为80,150.同时对图像进行二值化处理(0和255),从而减少后续算法的复杂性,并且对其进行Canny算子的提取边缘,如图3所示.
2.2与传统的滤波去噪算法的效果对比
同时,本实验也采用了中值滤波、高斯滤波及均值滤波3中经典算法对图3进行滤波(图4).
图5,6为基于空间滤波思想的滤波改进算法执行效果.由图4~6可知,传统算法的滤除对于这种分散噪声的效果,并不明显,而改进滤波后算法用于除去道路图像的噪声的效果比较好.
2.3算法适用性测试
为了测试算法的实用性,分别采集了结构化道路和带有阴影的道路图片作为实验对象.为了只拟合道路的两个边缘,将拟合的两条直线中间非道路部分的像素设为0.为了验证上述算法的准确性,对采集的道路照片进行测试,将提取的直线放入原图进行比较,如图7,8所示.各算法的运算时间分别为:均值滤波算法为0.223657 s,中值滤波算法为0.339636 s,高斯滤波算法为0.480848 s,本算法为0.156681 s.
3总结
本文作者在传统的滤波方法基础上提出了一种新的去除噪声的算法,并且将其运用在道路识别中.同时以列提取点集进行最小二乘法拟合直线道路边缘.通过与原图的对比效果,发现拟合效果较好.但是本算法仅采用直线拟合,以至于对于弯道的拟合效果不够理想.因此,将在下一步工作中解决弯道问题.
参考文献:
[1]张玲新,季本山.基于AIS的近海水上智能交通系统 [J].电子科技,2012,25(8):104-106.
Zhang L X,Ji B S.Intelligent coastal waters transportation system based on AIS [J].Electronic Science and Technology,2012,25(8):104-106.
[2]徐杰,李晓虎,王荣本,等.车辆自主导航中的道路边界识别算法 [J].中国图象图形学报,2003,8(6):674-678.
Xu J,Li X H,Wang R B,et al.Road edge detection technique for autonavigation of vehicle [J].Journal of Image and Graphics,2003,8(6):674-678.
[3]徐友春,王荣本,李克强,等.一种基于直线模型的道路识别算法研究 [J].中国图象图形学报,2004,9(7):858-864.
Xu Y C,Wang R B,Li K Q,et al.A linear model based road identification algorithm [J].Journal of Image and Graphics,2004,9(7):858-864.
[4]刘金龙,张晓雨.基于直线模型的道路边界识别技术 [J].电子科技,2014,27(10):36-39.
Liu J L,Zhang X Y.Road edge detection technique based on the linear model [J].Electronic Science and Technology,2014,27(10):36-39.
[5]马雷,武波涛,李昊.基于蚁群算法的弯曲道路边界的识别 [J].兵工学报,2009,30(9):1236-1241.
Ma L,Wu B T,Li H.Identifying of the bent lane based on ant colony algorithm [J].Acta Armamentarii,2009,30(9):1236-1241.
[6]马雷,戚俊杰,张润生,等.基于DS证据理论的不同光照条件下道路边界识别 [J].汽车工程,2011,33(8):707-712.
Ma L,Qi J J,Zhang R S,et al.Identification of lane boundary under different lighting conditions based on DS evidence theory [J].Automotive Engineering,2011,33(8):707-712.
[7]Russell M,Fischaber S.OpenCV based road sign recognition on Zynq [C].Proceedings of the 11th IEEE International Conference on Industrial Informatics,Bochum:IEEE,2013.
(責任编辑:包震宇,郁慧)
