从Big Dog到Spot Mini:波士顿动力四足机器人进化史
2018-05-14刘京运
刘京运


前不久,一段视频刷爆了朋友圈,视频中一个四足机器人不顾人类的阻拦,奋力打开一扇门,最终得以顺利通过。看过视频的人无一不被机器人的“执着”所震撼,一夜之间,这个机器人就成为了当之无愧的“网红”。其实,这个“网红”正是由美国波士顿动力公司研制的一款名为“Spot Mini”的四足机器人,这不是波士顿动力公司推出的第一款四足机器人,本文以时间为线索,概览波士顿动力公司四足机器人的研发历程,带你领略“大狗们”的魅力。
机器人诞生的初衷在于服务人类,将人类从重复、繁琐甚至危险的工作中解放出来,进而把有限的人力资源投入到更有价值的生产劳动过程中去。
1920年,“机器人”一词首次被捷克斯洛伐克作家卡雷尔·恰佩克(Karel Capek)提出,自此,机器人开始了它漫长的发展进程。
如今,在我们的生活中随处可见机器人的身影,但它们大多只是“移动的电脑”,仅能根据预先设定的程序指令,进行简单和重复的操作,这也在一定程度上限制了我们对于机器人的认知。
传统的认知一旦形成,新鲜事物的出现就会极具颠覆性。2005年,美国波士顿动力公司拍摄的一段长达3分半钟左右的视频,在网上引发了各界的广泛关注。视频内容显示,一台四足机器人在身负重物的情况下仍能灵活行走,并且可以对外力干扰做出快速反应,始终保持躯体的平衡稳定。
一时间,关于机器人发展前景的探讨再次成为炙手可热的话题,波士顿动力公司也顺理成章地成为了众人关注的焦点。
波士顿动力公司
波士顿动力公司成立于1992年,主要开展机器人相关研究工作,其目标是打造像人或动物那样,能够在现实世界中灵活工作的智能机器人,成立至今,吸引了众多来自世界各大院校的顶尖科研人才。波士顿动力公司之所以能具备如此强大的号召力,与其创始人马克·雷波特(Marc Raibert)不无关系。
马克·雷波特是典型的学院派创业者,其在麻省理工学院获得博士学位后,在卡耐基·梅隆大学创立了CMU leg实验室,并担任副教授一职。1986年,马克·雷波特重新回到麻省理工学院,继续从事机器人的开发和研究工作,并最终于1992年离开MIT,创建了如今的波士顿动力公司。
机器人必须具备的三项能力
美国科幻小说家艾萨克·阿西莫夫(Isaac Asimov)于1950年,在其代表作《我,机器人》一书中,提出了机器人所需遵守的三条法则,后人将其称为“机器人三定律”,即:
·机器人不得伤害人类个体,或者目睹人类个体将遭受危险而袖手旁观;
·机器人必须服从人给予它的命令,当该命令与第一定律冲突时例外;
·机器人在不违反第一、第二定律的情况下要尽可能保护自己的生存。
这三条定律在一定程度上为机器人的研发工作提供了参考,强调了在机器人研发过程中所需遵守的安全性准则,但这三条定律应用的前提是机器人足够智能,就目前而言,机器人的智能化水平依然较低,因此,这三条定律尚不具备充足的用武之地。
要想让机器人更智能,首先要做到的是让机器人能够像人或动物一样自由行动。在馬克·雷波特看来,要想实现这一目标,必须让机器人具备以下三项能力:
·平衡性和动态运动能力
·对于运动的控制能力
·移动感知能力
平衡性和动态运动能力能够让机器人在任意地方、任何地形保持平衡,并实现自由活动,这意味着机器人的工作范围得到了有效扩展。对运动的控制能力是指机器人可以灵活地操控物体(如使用键盘和遥控器等),同时进行自由活动,这意味着机器人能够在移动的过程中轻松完成各项操作任务。移动感知能力是指机器人能够感知空间中物体的稳定存在,即便视线移向别处也能够避开障碍,这意味着机器人能够绘制出周边环境的障碍位置图,从而在前进或后退的过程中都能够有效避开障碍物。
波士顿动力公司正是从以上三点出发,开展对机器人的各项研发工作的。
Big Dog:踹不倒的机器人
Big Dog被人们亲切地称为“大狗”,是波士顿动力公司于2005年推出的一款四足机器人,也正是这款四足机器人让波士顿动力公司名声大噪。大狗抛开传统的轮式或履带式机器人,转而研究四足机器人,是因为四足机器人能够适应更多地形地貌,通过性能更强。
在波士顿动力公司发布的宣传视频中,Big Dog在装载着重物的情况下,仍能对人类从其侧面的踢踹做出灵敏的反应,始终保持站立的姿态。
Big Dog高度约为1米,重量约为109公斤,可以背负45公斤的有效负载进行自由行走或奔跑,最快移动速度可达6.4公里/小时,最大爬坡角度可达35度。同时,Big Dog能够适应多种复杂路况,即便在雪地或泥洼中也能行走自如,就算有人在其侧面施加外力,Big Dog也能快速调整四足动作,以保持身体稳定,避免摔倒。它之所以具备如此强大的能力,离不开其精巧的设计结构和缜密的计算系统。
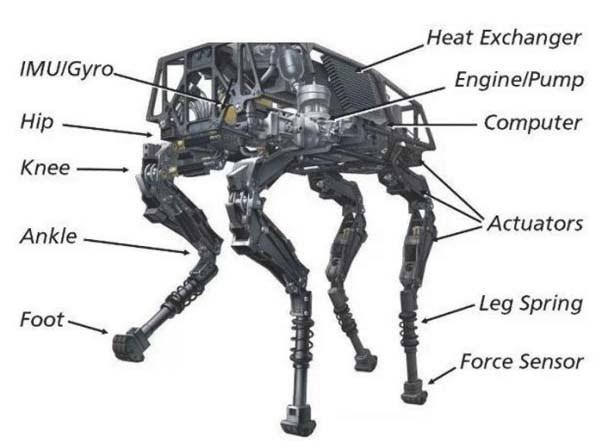
Big Dog以四足哺乳动物的躯体结构为参考,采用机械方式进行组装,四肢具备的关节型结构可以有效吸收冲击,起到减震作用;其整体具有16个自由度,可以在横纵两个方向自由移动,除此之外,Big Dog由一台汽油发动机提供动力,发动机驱动液压系统,以液压系统作为驱动输出动力,进而控制每段肢体的动作,实现了躯体的灵活运动。
Big Dog搭载的运动控制系统有效保障了机器人运动的独立自主性,仅需要少量的人工干预,机器人就可以完成既定任务。该运动控制系统通过安装在关节和足底等区域的传感器检测肢体状态信息,借助陀螺仪和惯性传感器监测躯体的平衡稳定信息,从而能够及时对平衡干扰因素做出快速反应,有效保证了重心稳定,使得机器人能够保持平稳的姿态前行。
同时,它还具备较高的导航智能性,可以通过激光雷达传感器和立体视觉传感器自主感知周边的环境信息,进而在虚拟环境中构建地形模型,同时借助自身搭载的运算电脑进行路径规划,依靠运动控制系统沿规划路径到达目标点。
尽管Big Dog拥有强大的功能,但由于其运行过程中噪音较大,最终没有被美国军方采用。
LS3:能担能抗的大力士
LS3又被称为“阿尔法狗”,其中“LS”是“Legged Squad”的缩写。LS3机器人是波士顿动力公司继Big Dog之后推出的一款新型四足机器人,于2012首次公开亮相。与Big Dog相比,LS3的体型更为庞大,负载能力更强,移动速度也更快,实用性能有了大幅提升。
在波士顿动力公司发布的宣传视频中,LS3在装载着重物的条件下,仍能灵敏地爬上山坡或通过崎岖的烂路。
LS3高度约为1.7米,重量约为509公斤,可以背负181公斤的有效负载进行自由行走和奔跑(在一次平地测试中,LS3曾创下背负500公斤负载进行自由行走的纪录),最快移动速度可达45公里/小时,在实际测试中,LS3可在崎岖的山路中依然保持较快的前进速度。
它具有12個自由度,由燃气发动机或柴油发动机提供动力,发动机驱动液压系统,以液压系统作为驱动输出动力,进而控制每段肢体的动作,实现躯体的灵活运动。在燃料充足的情况下,LS3可运行24小时,最远行驶里程可达32公里。
LS3继承了Big Dog的移动特性,通过借助地形感测、避障和GPS等技术,保障前行过程中的安全性,从而可以顺利到达目标地点。除此之外,LS3采用计算机视觉技术,实现了自动跟踪,因此它无需搭载专用的驱动程序即可跟随目标人员前行。
LS3参与了美国军方的作战训练任务,但由于其自身运行噪音问题没有得到有效解决,且故障维修难度较大,最终还是遭到美国军方弃用。
Wild Cat:机器人领域的运动健将
Wild Cat又称“野猫机器人”,是波士顿动力公司于2013年推出的一款四足机器人,其前身是Cheetah,即“猎豹机器人”。Cheetah的躯体上方连接着多根线缆,这也注定它只能是一款在实验室中运行的机器人。
在波士顿动力公司发布的宣传视频中,Cheetah在跑步机上创造了48公里/小时的机器人奔跑时速纪录。
尽管Cheetah只能在实验室中运行,但它却创下了48公里/小时的奔跑速度纪录。Cheetah采用关节型的背部结构,这使得Cheetah的背部结构能够在其奔跑过程中灵活运动,以更好地协调整体姿态,提高步幅和奔跑速度。
在波士顿动力公司发布的宣传视频中,Wild Cat可以在户外敏捷地奔跑,并且可以轻松跳过障碍物甚至在奔跑过程中实现急停、掉头等操作。
我们可以将Wild Cat看做是Cheerah的“无线版本”,它的高度约为1.17米,重量约为154公斤,最快移动速度可达32公里/小时。Wild Cat可以适应多种地形,在复杂路况条件下也能以16公里/小时左右的速度保持前行。除此之外,Wild Cat还能够实现快速跳跃和快速转身等动作,相较于Big Dog和LS3而言,灵活性有了大幅提升。
Wild Cat具有14个自由度,由一台甲醇发动机提供动力,发动机驱动液压系统,以液压系统作为驱动输出动力,进而控制每段肢体的动作,实现躯体的灵活运动。除此之外,Wild Cat采用激光测距仪来精确测量机器人距地面高度及自身姿态等信息,并通过动态控制算法计算出四肢所需执行的动作,进而实现稳定运行。
虽然Wild Cat采用了甲醇发动机,但运行噪音依然较大,未来如果采用电池能源提供动力,那么Wild Cat就可以实现低噪奔跑,提高其自身的隐蔽性,从而在战场上发挥出色作用。
Spot:小巧灵活的机灵鬼
波士顿动力公司先后研发了Big Dog、LS3和Cheetah三款四足机器人,尽管这些机器人在性能方面都有着卓越的表现,但由于噪音问题较为突出,最终都没有得到广泛使用。因此,波士顿动力公司充分总结了过去的经验和教训,打造了一款名为“Spot”的新型四足机器人。
在波士顿动力公司发布的宣传视频中,Spot机器人实现了低噪运行,可以借助两条肢体在原地跳跃而不摔倒,并且可以灵活上下楼梯。
Spot是波士顿动力公司在2015年推出的一款四足机器人,其高度约为0.94米,重量约为75公斤,可背负45公斤的有效负载进行自由行动或奔跑。从波士顿动力公司官方发布的视频来看,Spot的爬坡速度较Big Dog更快,步伐更灵敏。
Spot具有12个自由度,采用电池能源提供动力,从而驱动液压系统,以液压系统作为驱动输出动力,控制每段肢体的动作,实现躯体的灵活运动。采用电池能源这一举措,有效控制住了机器人的运行噪音,但与此同时,机器人的运行时间也受到了影响。在充满电的情况下,Spot可以连续运行45分钟左右,这与LS3最长连续运行24小时的时间形成了鲜明对比。
Spot采用激光雷达传感器和立体视觉传感器感知周边路面信息,从而有效避开路面障碍,合理协调四肢动作,但Spot的移动并不完全依靠这套传感系统,有时候它也靠“感觉”。
在波士顿动力公司官方发布的视频中有这样一幕:Spot正独自攀上一段台阶,但它并不能根据台阶的高度和宽度调节步高和步幅,尽管每一节台阶都较矮且宽,但Spot还是保持较高的步高和较短的既定步幅,这导致它在攀爬过程中出现了一次失误。因此我们可以想象,如果这组台阶每一节的高度和宽度都不同的话,那么Spot的失误或许会更多。
之所以会出现这样的失误,原因在于Spot在攀爬台阶的过程中,激光雷达传感器和立体视觉传感器不能捕捉到完善的路面信息,因此Spot需要根据仅有的少量路面信息估算四肢的动作,尽管这对Spot通行能力的影响几乎可以忽略不计,但这却为波士顿动力公司进一步完善机器人行为能力,提供了典型素材。
Spot Mini:执着的“独臂勇士”
2017年11月,波士顿动力公司对外展示了其研发的最新一款四足机器人Spot Mini。与Spot相比,Spot Mini的外形更加小巧,并且在头部增设了一副机械臂,机械臂的顶端是一个夹手,可以灵活操控物体。
在波士顿动力公司发布的宣传视频中,Spot Mini在人类阻拦的条件下,仍用自身搭载的机械臂奋力打开了关闭着的铁门。
Spot Mini高度约为0.84米,重量约为30公斤,可背负14公斤的有效负载自由行动或奔跑。与Spot相同,Spot Mini也采用电池能源提供动力,从而驱动液压系统,以液压系统作为驱动输出动力,控制每段肢体的动作,实现躯体的灵活运动。与Spot相比,Spot Mini的单次运行时间有了较大提升,在满电状态下可运行约90分钟。
Spot Mini继承了Spot的所有移动特性,并具有17个自由度,其中有5个自由度位于其顶部的机械臂上,其余12个自由度平均分布于四肢。机械臂的作用不仅在于操纵物体,还可以在Spot Mini跌倒时辅助其重新站立。
Spot Mini的机械臂上搭载了一个摄像头,这有助于帮助机械手准确地找到目标物体。除此之外,Spot Mini的正前方还搭载了一套3D立体摄像头,这可以帮助它更好地观察前方的障碍物情况,例如,Spot Mini可以在遇到桌子时降低姿态,从桌子下方顺利通过。因此,我们有理由相信,Spot Mini在进行类似于攀爬台阶等活动时,会具有比Spot更加出色的表现。
波士顿动力公司曾赠送给特斯拉公司CEO埃隆·马斯克(Elon Musk)一台Spot机器人,当埃隆·马斯克在户外运行这台机器人时,旁边有一只小狗却一直冲着Spot狂吠不止,这个细节虽然有趣,但也应该引起我们对于机器人外形设计的重视。由于Spot与Spot Mini有着相似的外形,所以,不难想象,宠物们对于Spot Mini的态度应该也不会太友好。因此,如何让机器人的外形更好地被动物接受应该成为机器人设计工作的重点之一。
“大狗们”为我们开启了一扇门
面对机器人智能化程度的不断提高,有人表示恐惧,也有人表示乐观,这似乎很好地解释了“恐怖谷理论”。在一次公开演讲中,马克·雷波特阐明了自己的观点,他表示,机器人的发展会给我们的生活带来积极影响,未来,机器人可以帮助我们照顾父母、看护孩子甚至照顾残疾人士,而且这一天很快就会到来。
相信你也对网上流传的Spot Mini开门的视频印象深刻,其实,Spot Mini打开的不仅是一扇普通的铁门,更是一扇通向美好生活的大门。只要我们坚定信仰,采用先进的技术为机器人赋能,那么人机共存、互利共生的盛世局面終会到来,而我们正对这一天的来临,满怀期待。
