基于ADAMS的采摘机激振机构仿真分析
2018-05-11李建友刘克铭
李建友,刘克铭
(辽宁工程技术大学 机械工程学院,辽宁 阜新 123000)
2014年中国专家把树莓预测为第三代水果,认为它有无限的发展前景和市场。树莓果实柔软多汁,香味浓郁,色泽宜人,是一种集食、补、药于一体的珍贵水果。由于机械化的采集种植要求严格,目前我国的树莓采集大多采取人工采摘方式。但是随着树莓种植产量逐年升高,而树莓成熟果实鲜嫩多汁,摘果时间短,保鲜期短,鲜果不宜储存,人工采摘速度慢,费用高,远远不能满足生产加工需要,制约树莓产业进一步快速发展。
目前,国内外振动式采摘机普遍是利用往复式运动机构或者偏心回转机构产生的惯性力作用在果树的树干、树枝或树冠上,但是存在采摘效率低等问题,如把往复式运动和回转运动复合到一起(即为复合式运动),效率会提高,本文对此展开研究。
1 树莓振动采摘条件的建立
树莓采摘机采摘原理如图1所示,采摘机以一定的频率拍打树莓树枝时,结有果实的树莓树枝发生受迫振动,振动输出响应f(z,t)为

式中fd(z,t)为树莓树枝受迫振动输出振动响应,fF(z,t)为树莓树枝受迫振动输出稳态解。
结合式(1),得到树莓果实所受的采摘惯性力

式中m0为树莓果实质量。
由于树莓枝叶相互叠连存在阻尼,树莓树枝受迫振动输出瞬态解fd(z,t)将随振动时间的延续而逐渐减少直至趋于0,故忽略fd(z,t)的影响,主要研究树莓树枝受迫振动输出稳态解fF(z,t)所形成的采摘惯性力F(FN)。
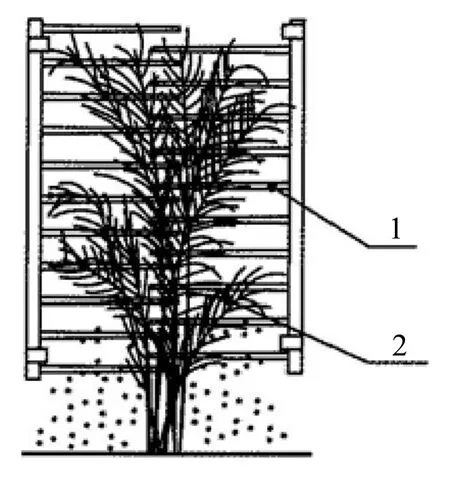
图1 树莓振动采摘原理
在实际振动过程中,树莓受到采摘惯性力作用,当采摘惯性力和其与果柄的结合力相等时被振落。设熟果实与树枝结合力为F1,生果与树枝结合力为F2,忽略瞬态振fd(z,t)的影响,考虑到采摘过程要保留生果,采摘熟果。得到实现树莓振动采摘条件是F1≤FF≤F2。查阅文献得知[1],熟果实与树枝平均结合力F1约为0.47 N,生果与树枝平均结合力F2约为4.26 N。
2 激振机构
采摘执行机构的传动系统为液压马达→激振机构→齿轮箱→振动棒,假设激振机构为差动轮系+偏心块(图2),本文所用的差动轮系与汽车后驱动桥上的差速器有所不同,这里的输入轴为传统差速器的输出轴,行星轮上连接偏心块。液压马达与轴1相连,轴1末端装有锥齿轮2,行星轮3、4绕着锥齿轮2公转,行星轮3、4与齿轮箱相连,带动齿轮箱进行旋转,又因齿轮箱与振动棒相连,振动棒也随着齿轮箱做旋转运动。行星轮3、4各连接有偏心块5,两个偏心块旋转方向相反。
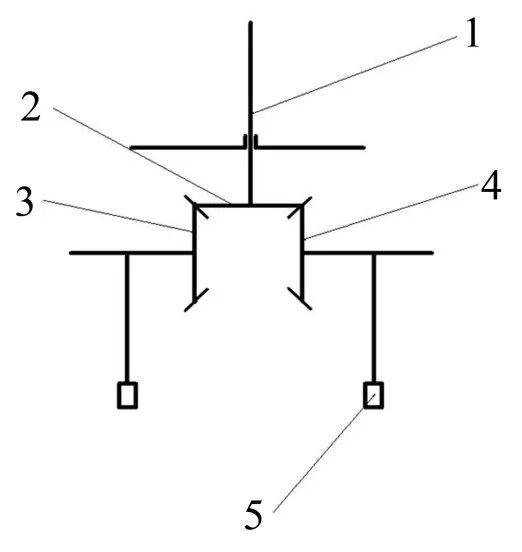
图2 激振机构运动简图
由于液压马达作间歇回转运动,在马达停歇期间,惯性与重力作用会使偏心块往复运动,产生振动。旋转时只产生纵向的激振力,横向激振力被抵消[2]。
2.1 偏心块的结构设计
通常,激振器中偏心块结构有三种形式,分别为半圆式、过半圆式和少半圆式,每一种又分为不带圆角型和带圆角形。其中带圆角型最大总变形和最大等效应力要优于不带圆角型,现在基本上常用半圆式带圆角型[2]。
偏心块所产生的激振力可按下式进行计算

式中F为激振力,kN;G为偏心块质量,kg;rp为偏心块偏心距,m;ω为回转轴角速度,rad/s;
根据式(3),激振力可从偏心块的质量和偏心块的偏心距两方面进行调整。常用的调整方法有:(1)通过增减偏重片的数量来改变偏重块的重量;(2)移动两侧偏重块相对于固定轴的位置,改变两者之间的距离,从而改变整个偏重块的偏心距[3]。
根据采摘机的特点,由于激振器有尺寸要求,偏心距调整范围不大,可以不考虑,偏心块材质一般选用45#钢,根据结构的大小选取合适数量的偏重片。
3 激振机构运动仿真
3.1 模型导入
本文研究的树莓采摘机模型较复杂,不适合在ADAMS中直接建立动力学模型,这里选择SolidWorks三维建模软件建立模型,进行装配,然后导入到ADAMS里,仿真模型如图3所示。
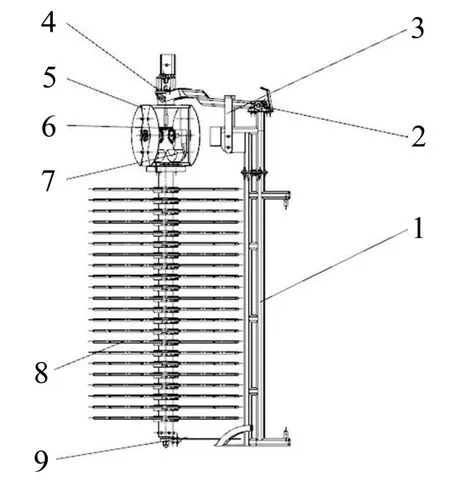
图3 分离机构仿真模型
3.2 施加约束和驱动
ADAMS提供了多种运动副和驱动方式,根据机构的实际运动情况,选择相应的运动副进行添加,并施加合适的驱动,以实现预定的动作[4]。
接触参数的值分别为:刚度系数为269 500N/mm,阻尼系数为50 N·s/mm,嵌入深度为0.01 mm,动、静摩擦因数分别为0.05、0.08,动、静阻力滑移速度分别为10 mm/s、0.1 mm/s[5]。
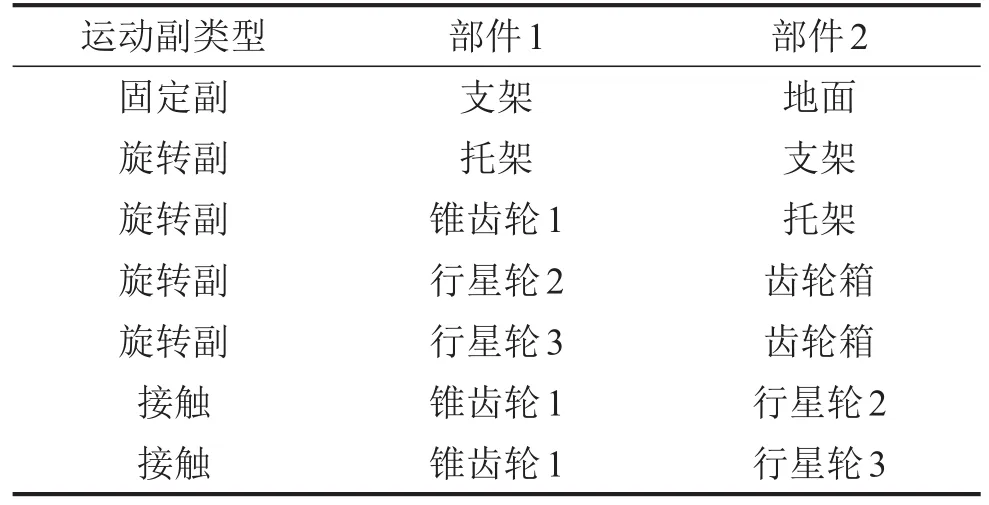
表1 仿真所需运动副
4 仿真结果分析
液压马达直接驱动偏心块机构工况下所得到的结果如图4所示,当工作时间区域内振动频率较小时,可以提高转速来获得较高的频率,随着振动频率的增加,柔性振动棒的加速度会随之增加[6],其作用在植株上的激振力必然增加,当不考虑其他因素时,一定会有一个合适的转速能达到采摘的要求,考虑到转速越高对液压元件的性能要求越高,稳定性等问题需要采用其他激振机构解决。
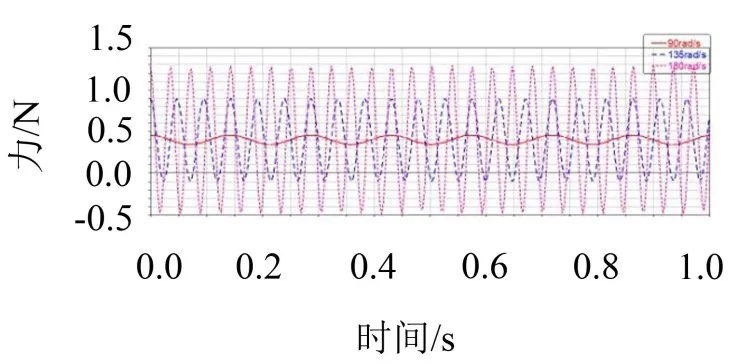
图4 激振力随转速变化规律图
液压马达经过差动轮系驱动采摘执行机构实现复合式运动,当液压马达角速度为135 rad/s时仿真结果如图5所示。最大激振力达到0.83 N,可以达到采摘的要求,进行对比发现与之前角速度达到180 rad/s时频率和最大激振力差不多,速度降低,能耗减少,液压马达的工作强度也得到缓解,有利于延长马达的工作寿命。
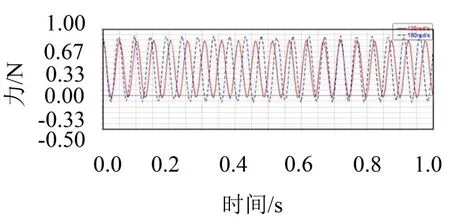
图5 激振力随转速变化规律图
选用斜齿轮液压马达时,托架部分加装一个弹簧,底部再加装一个板簧,由于斜齿轮液压马达会产生一个向下的作用力使采摘执行机构产生上下运动,在纵向上就又多了一个激振力。在马达角速度为135 rad/s时得到的仿真结果如图6所示。
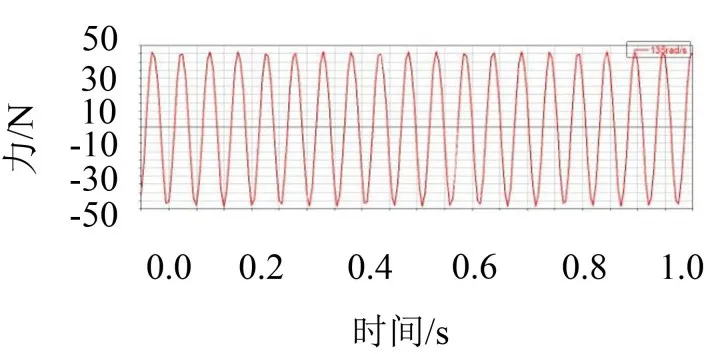
图6 加装弹簧所产生的激振力
由图6可见,振幅大大增加,最大激振力达到46.5 N,远远大于所要的力,可以通过降低转速达到采摘的要求,但是振动频率会下降。可以提高横向的振动频率,来弥补纵向的振动频率,使能耗得到进一步降低。
5 结语
(1)基于ADAMS的仿真结果比较了两种激振机构的工作性能,采用差动轮系+偏心块的复合式激振机构的性能明显优于传统的激振机构,而且提高了零件的工作寿命,节省维护费用,符合当前节能、环保、绿色的发展大趋势,符合提高机械效率的发展方向[7]。
(2)在此基础上研究了复合式激振机构所受到的影响因素,得到振幅和频率与转速之间的关系、激振力与偏心块之间的关系,为今后优化设计奠定了基础。
参考文献:
[1]王海滨.振动式蓝莓采摘的机理分析与仿真[J].农业工程学报,2013(12):112-116.
[2]邢晓林.振动时效装置激振器偏心块优化设计[J].中国新技术新产品,2012(17):120-121.
[3]吴振卿.惯性振动设备用箱式激振器的设计[J].郑州工业大学学报,1999(3):16-18.
[4]牛国栋,张士新.虚拟样机技术在农业机械产品开发中的应用[J].农机化研究,2008(5):57-159.
[5]鲁磊.基于联合仿真技术的差速器齿轮机构动力学分析[J].山东交通学院学报,2012(4):23-127.
[6]李永强.基于ADAMS的酿酒葡萄植株受迫振动仿真研究[J]. 安徽农业科学,2015(27):220-224.
[7]薛烨.振动式林果采摘机虚拟样机设计及动力学仿真[D].株洲:中南林业科技大学,2013.