一种机器人末端工具快换装置的设计分析
2018-05-10廖堃宇刘满禄张俊俊
廖堃宇,刘满禄,张俊俊,张 华
(西南科技大学, 四川 绵阳 621010)
0 引 言
国际机器人联合会(International Federation ofRobotics,IFR)将应用于特殊环境的机器人称为特种机器人[1]。特种机器人的研究工作围绕在核环境、海洋工程、太空、军事应用展开[2]。特种机器人作业环境危险,所执行的任务通常具有多样性,任务目标的质量、形状和尺寸不尽相同。因此,仅使用单一的末端工具很难满足复杂的任务要求。最好的解决办法就是为机器人配备末端工具快速更换装置与工具库,使机器人能够根据作业任务实际需要更换末端工具,提高机器人的作业能力与作业效率[3]。
国内外都对快换装置进行了一定的研究。文献[4]设计了一种用于焊接机器人的快换装置,通过气动的方式完成末端工具的切换,但其密封性要求很高。荷兰为欧空局设计了一种小型快换装置,其需要很高的定位精度[5]。哈尔滨工业大学在国内对快换装置的研究比较多,主要针对太空环境,为了给末端工具提供转矩,使得快换装置的结构复杂化[6-9]。在前期设计工作中已经完成了一种螺母快换机构,其不能让机械臂与末端工具实现电气连接,且驱动机构体积很大[10]。
针对以上问题,优化设计了一种机器人末端工具快换装置,该装置具有位姿容差能力,能承受大载荷,不仅可以实现机械臂与末端工具的机械连接,同时可以实现两者的电气连接。
1 总体方案
1.1 工作原理
如图1所示,末端工具快换装置主要分为两部分,一部分为机械臂端,另一部分为工具端,机械臂端连接在机械臂上,工具端连接在末端工具上。快换装置的机械臂端与工具端能够实现机械上的连接与断开。通过这两者的连接与断开,完成机械臂与末端工具的连接与断开。
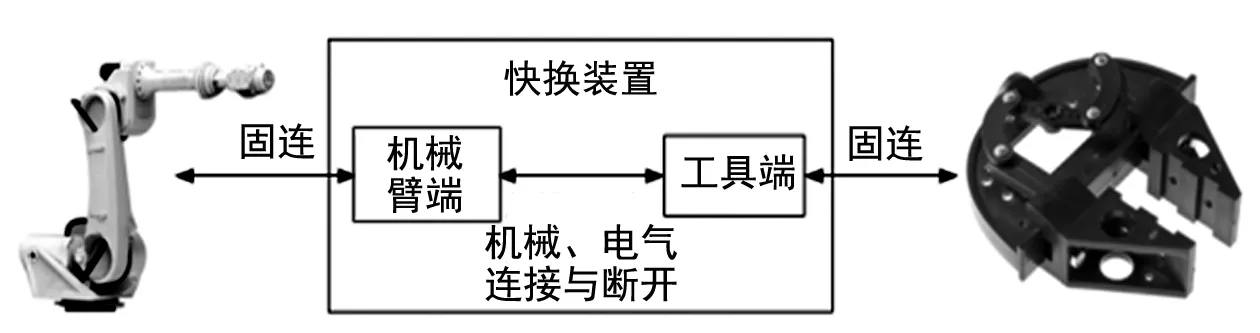
图1 快换装置工作原理
1.2 技术要求
设计的快换装置应用于遥操作拆除机器人,基于以上快换装置的工作方式,对快换装置提出以下要求:
(1) 大载荷 所设计的快换装置承载的末端工具质量大或承载的末端工具需要抓取较大质量的物体,所以该快换装置要求能够承受大载荷,其最大载荷为50 kg。
(2) 体积小、重量轻 机械臂能承受的载荷有限且不能限制机器人的作业空间,需要快换装置的最大直径小于160 mm,高度小于200 mm,重量小于10 kg。
(3) 位姿容差 机械臂与工具库上的末端工具的位置对准时会有一定的误差,需要快换装置的机械臂端与工具端在对接的过程中能进行误差补偿。
(4) 电气连接 机器人要控制末端工具工作需要向末端工具传递电流、电压、通信等信号。
(5) 故障保护功能 快换装置需要驱动装置完成机械臂与末端工具的锁紧与断开,当驱动装置故障时,机械臂与末端工具不能断开连接,需要继续保持锁紧状态。
2 机械设计方案
2.1 机械结构
如图2所示,快换装置主要由驱动机构、切换机构、锁紧机构、容差机构组成。

图2 快换装置机械结构1.电机 2.齿轮 3.锁紧壳 4.压簧 5.锥形槽 6.钢珠球 7.锁紧槽 8.工具端 9.定位轴 10.电连接器 11.机械端主体 12.铰链座 13.连杆 14.曲柄
驱动机构采用电机驱动,齿轮传动。两个齿数相同、模数相同的齿轮对称分布并且啮合。由电机带动其中一个齿轮转动,再由该齿轮带动另外一个齿轮转动,两个齿轮再带动切换机构运动。
切换机构由两个对称分布的转杆滑块机构组成,两个转杆通过驱动机构的齿轮带动转动,由此通过连杆推动锁紧壳直线运动。锁紧壳下的压簧用于支撑与复位,锁紧壳上下部位分别安装了限位装置。
锁紧机构采用钢珠球锁紧的方式,由8个径向均匀分布的钢珠球、锁紧壳、机械臂端主体上的钢珠球孔和工具端上的锁紧槽组成。
容差机构由两个定位轴与工具端上的锥形孔组成,定位轴前端为半球形。对接时,只要定位轴落入锥形孔内,就可以通过锥形孔导向,使定位轴逐渐进入锥形孔。
2.2 对接方案
换装时,快换装置的工作流程如图3。
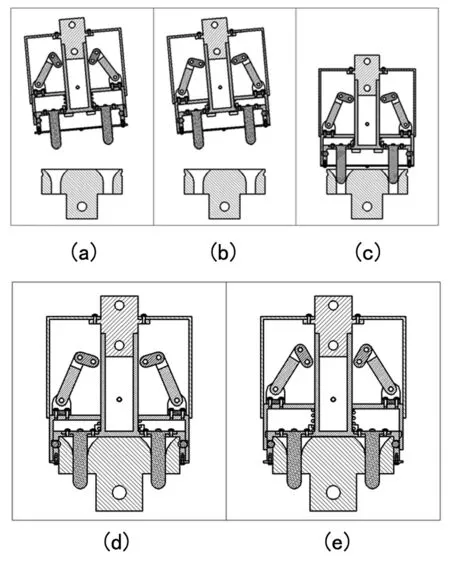
图3 换装过程
首先机械臂与所要更换的末端工具对准,但存在一定的误差(误差在一定范围内),如图3(a)所示。
控制快换装置内的电机转动,电机带动两个齿轮转动,再带动两个转杆滑块机构工作,推动锁紧壳向下直线运动,直到锁紧壳与下限位装置接触。此时,钢珠球与锁紧壳上的锥形槽对准,钢珠球处于自由状态,如图3(b)所示。
控制快换装置内的电机反向转动,锁紧壳向上运动,锥形槽推动钢珠球进入锁紧槽,锁紧壳继续向上运动,直到与上限位装置接触,锥形槽与钢珠球完全错开,钢珠球被锁紧壳挤入锁紧槽内,完成z轴向方向自由度的限位,快换装置完成锁紧,如图3(e)。
3 切换机构分析

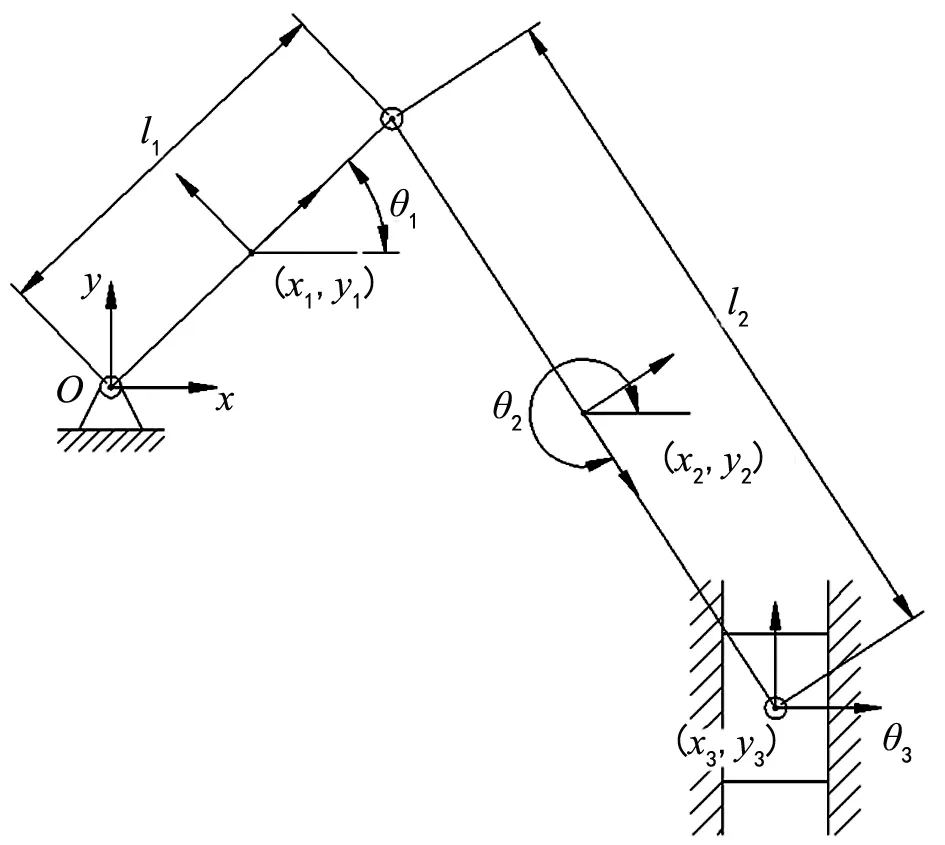
图4 切换机构简图
转杆滑块机构为多刚体系统,其位置坐标阵为:
约束方程为:
坐标数为9,约束方程数为8,则系统自由度为1。引入拉格朗日乘子阵:
约束方程的雅克比为:
Φq=
加速度约束方程的右项式为:
增广主动力阵为:
Fa= (0 -m1gM0 -m2g 0 0
F-m3g 0)T
增广质量阵为:
m= diag (m1 m1 J1 m2 m2 J2
m3m3J3)
则其动力学方程为:
4 锁紧机构仿真分析
使用动力学仿真软件Adams对锁紧机构进行仿真分析。在三维软件中先将已经建好的快换装置的三维模型简化,然后将其导入到Adams中。在Adams中定义零件的属性,在各个零件之间添加约束,如图5所示。
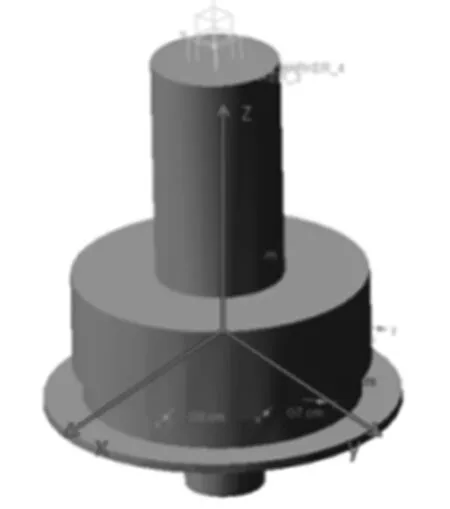
图5 快换装置仿真模型
该模型主要分为锁紧壳、机械端主体、工具端、8个钢珠球。在机械端主体与大地之间定义一个固定副,机械端主体与锁紧壳之间定义移动副与接触约束,机械端主体与工具端之间也定义移动副与接触约束,两个移动副都是沿z轴方向。工具端、机械端主体、锁紧壳分别与8个钢珠球定义接触约束。定义重力方向沿机械端主体的轴向指向工具端。在锁紧壳上添加力F,该力在0~5 s内方向向上、大小不变,即压簧与切换机构在锁紧时对锁紧壳的力;在5~10 s内该力逐渐减小至一定值,此时该力方向向下,即切换机构在对锁紧壳的推力的结果;10~15 s内该力保持减小到的定值不变,即快换装置解锁时的状态。
由此可以得到快换装置锁紧与断开的过程,如图6所示。
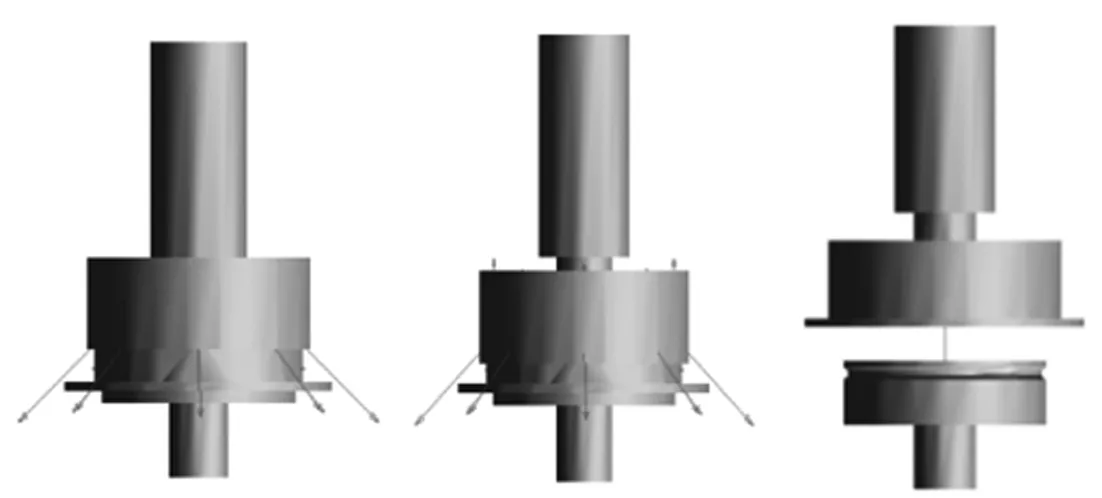
图6 快换装置的锁紧与断开过程
同时又可以得到锁紧壳在z轴方向受到的力、工具端对钢珠球三个坐标轴方向的力以及锁紧壳对钢珠球三个坐标轴方向的力,取在快换装置y轴上的两个钢珠球做对比,其中钢珠球1在y轴正方向,钢珠球2在y轴负方向,如图7所示。
由以上仿真结果可以看出,在0~5 s时,机构处于锁紧状态,钢珠球以及锁紧壳受力保持稳定;从5 s开始,锁紧壳的受力发生变化,但锁紧壳向下运动需要一定的时间,钢珠球受力仍然保持稳定;13 s以后,锁紧壳接触到机械端主体的下限位装置,发生碰撞,锁紧壳受力产生一定的波动,此时,钢珠球孔与锁紧槽对准,钢珠球进入锁紧槽,锁紧状态解除,工具端因重力掉下,钢珠球受工具端的力为0,受到锁紧壳的力也趋于0。
锁紧壳对两个分别在y轴正负方向的钢珠球在y轴上的力大小相等,方向相反,说明锁紧壳受到两个钢珠球的力能达到平衡。锁紧壳对钢珠球在z轴上的力方向向下,但大小趋近于0,说明钢珠球受到的滚动摩擦力非常小。
综上所述,快换装置的锁紧机构能满足预期的要求,能够完成快换装置对末端工具的锁紧与断开。

(a) 工具端对钢珠球1、2的力

(b)锁紧壳对钢珠球1、2的力

(c)锁紧壳沿z轴方向的力图7 锁紧机械的仿真结果
5 结 论
设计了一种机器人末端工具快换装置,针对特殊环境机器人的要求,使其具有大载荷、体积小、重量轻、位姿容差、电气连接、故障保护的特点。阐述了该快换装置的机械机构及对接方案。对其切换机构进行了动力学建模,通过Adams对其锁紧机构进行了仿真分析。通过仿真结果的分析,证明了该快换装置能够完成锁紧与断开功能,为快换装置的后续研究及优化设计提供了依据。
参考文献:
[1] 王田苗.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(9):1-13.
[2] 张明路, 彭 平, 张小俊. 特殊环境下服役机器人发展现状及其关键技术研究[J].河北工业大学学报,2013,42(1):70-75.
[3] 谭定忠,王启明,薛 开,等.机器人末端操作器自动更换技术研究[J].机械与电子,2004,(3):56-58.
[4] 陈有权.机器人作业工具快速更换技术[D].哈尔滨:哈尔滨工业大学,2008.
[5] Kester G J A N, Visser M. A novel concept for a tool exchange device[C].11th European Space Mechanisms and Tribology Symposium, 2005,591:271-278.
[6] 刘奇坤.空间机器人末端工具更换装置的研究[D].哈尔滨:哈尔滨工业大学,2011.
[7] 丰 飞,刘伊威,刘 宏,等.一种空间大容差末端执行器设计方案与仿真分析[J].机器人,2011,33(6):691-699.
[8] 孙 奎,金明河,崔平远,等.一种新型快速更换装置及其捕获容差[J].机器人,2014,36(1):92-99.
[9] Liu Y, Jiang Z, Jin M, etal. A novel tool exchange device for space robots[C].2014 IEEE International Conference on Mechatronics and Automation,2014:233-238.
[10] 蒋 君,张俊俊,王基生,等.遥操作机器人末端工具换接装置的设计与研究[J].机械设计与制造,2015,(11):108-111.
[11] 洪嘉振,杨长俊.理论力学[M].第3版.北京:高等教育出版社,2008.