星载相控阵GNSS-R测高系统设计与实验
2018-05-10姚崇斌冯剑锋杜璞玉孟婉婷
周 勃,秦 瑾,姚崇斌,冯剑锋,杜璞玉,孟婉婷
(上海航天电子技术研究所,上海 201109)
0 引言
GNSS-R(global navigation satellite system-reflection)是利用导航卫星L波段信号为发射源,以岸基、航空、星载等为平台,通过GNSS-R探测装置接收并处理海洋、陆地或目标反射信号,实现特征要素提取或目标探测的技术[1]。1993年,欧洲航空局(ESA)首次利用GNSS反射信号进行海面测高,以提高时间/空间分辨率[2]。英国空间中心于2003年10月发射了UK-DMC灾难探测卫星,收集了大量的GPS L1波段的海洋表面散射信号的原始数据,验证了利用星载GNSS-R设备遥感海态参数、冰雪和陆地的可行性[3]。ESA于2008年启动了PARIS-IoD(passive reflectometry and interferometry system in-orbit demonstrator)项目,计划发射以GNSS-R为主载荷的海面高程测量卫星[4]。美国宇航局(NASA)于2012年开展了飓风全球导航卫星系统(cyclone global navigation satellite system,CYGNSS)项目,2016年12月以一箭八星的形式发射了CYGNSS飓风监视小卫星,通过八星组网,实现对全球海洋南北纬35°以内地区的热带飓风探测[5]。2014年,作为美国CYGNSS计划的一部分,英国的Surrey研究中心研制的SGR-Resi搭载在TechDemoSat-1技术演示验证卫星上,并发射成功[6]。我国GNSS-R海洋遥感技术于2002年起步,国内相关单位仍停留在地面或机载试验验证阶段[7],且大部分软件算法是基于传统的本地码相关,并没有广泛使用干涉式互相关算法。
国际社会军事、政治、经济的发展,使得人们对卫星对地观测载荷的要求越来越高,具有全天候、全天时、高分辨率、宽刈幅、短重访时间优势的海洋应用探测需求被提出,GNSS-R技术相对于传统的微波遥感技术是一项崭新的、有效的、低成本的微波遥感技术。本文以高精度海面高度探测载荷为主要研究目标,采用干涉式互相关处理方式,开展了星载多波束相控阵GNSS-R测高仪原理样机研制以及外场试验工作,为星载业务化应用提供了一定的技术基础。
1 相控阵GNSS-R测高系统设计
星载GNSS-R测高系统一般搭载在低轨卫星上,在接收导航卫星直射信号的同时,可接收来自地球表面的导航卫星反射信号。该信号对定位求解是一种多径干扰,通常采用各种方法加以抑制或消除,但从电磁波传播基本理论角度看,该反射信号携带反射面的特性信息,反射信号的波形、极化特征、幅值、相位和频率等参量的变化都直接反映反射面的物理特性,或直接与反射面相关。通过对反射信号的精确估计和接收处理,可以实现对反射面物理特性的估计与反演[8]。ESA计划2020年发射的GEROS(GNSS reflectometry, radio occultation and scatterometry)系统可能将是第一个具备中尺度海面高度测量的GNSS-R系统,其主要目标是利用GNSS反射信号测量和绘制海面高度。GEROS与SWOT(surface water ocean topography)及ESA和NASA的雷达高度计的时-空尺度对比如图1所示,GEROS可以在时间和空间尺度上扩展雷达高度计的观测能力,并可与之互相补充,有利于对复杂的海面中尺度结构(10~100 km)进行较高时间分辨率的观测,对中尺度海洋动力特征的建模、分析和预报提供独一无二的数据支撑[9]。
1.1 GNSS-R测高原理
在海面高度测量中反射面的定义有两种:一种是假设地球表面为水平,不考虑地球曲率,GNSS信号在地球表面发生镜面反射,该方式用于以地基或低空飞行器方式进行高度测量;另一种是采用地球椭球模型,考虑地球曲率对于反射的影响,该方式用于以高空飞行器或星载方式进行海面高度测量。在考虑地球曲率影响的条件下,建立GNSS-R测高几何路径延迟模型,如图2所示[10]。
图2中:rE为地球球面半径,以高斯密切球进行拟合;rE是接收机纬度B的函数,
(1)
式中:a为在WGS-84坐标系下定义的地球半长轴;e为偏心率。图2中:rs为镜面反射点到地心的距离;H为接收机的高度;θ为镜面反射点处的卫星高度角;γ为镜面反射点的方向角。
根据图2中几何关系可知,当精确测量出反射信号相对于直射信号总的延迟路径ρE后,即可得
(2)
得到接收机的高度H与延迟路径ρE关系为
(3)
1.2 测高系统设计
由于GNSS信号从20 000 km的高空传播到地面,其传播时间需进行修正,主要有电离层误差、对流层误差,需根据相应误差模型进行校正。因此,GNSS-R测高系统工作在GPS L1、L2频点和北斗B1、B2频点,通过接收一个导航系统的两个载波频率来消除电离层误差。GNSS-R海洋测高系统为收发分置,类似双基雷达前向散射模式进行遥感探测,将直射信号直接与反射信号进行干涉式相关处理得到一维时延相关功率谱进行测高,需要采用高增益的直射和反射天线以提高前端的信号信噪比,多个天线波束可对不同的区域进行覆盖,扩大覆盖范围。因此GNSS-R测高系统由上视多波束相控阵天线、下视多相控阵天线和多普勒延迟映射接收机组成,天线增益为18 dB,扫描范围为±30°,天线波束数为对天对地各4个,上视天线不同的波束分别对准不同的GNSS卫星,下视相控阵天线不同的波束分别对准上视天线波束锁定的GNSS卫星对应的镜面反射点。系统组成框图如图3所示。
1.3 可见星数目及波束数量仿真
根据GNSS-R几何关系,计算GNSS-R测高系统同时可见的直射信号和反射信号的数目,根据STK软件的仿真结果进行数据统计,可见卫星数目时间段的统计时间为6 h,上视天线的波束扫描范围为±30°,导航卫星为GPS和北斗(BD)卫星,星数目仿真结果分别图4所示。大部分可见星时间段的卫星数目为2、3、4个,最大可达到7个,可见的平均卫星数目为3个左右,这也是系统将相控阵波束数目制定为4的原因,若为兼容其他导航系统的卫星信号,且天线扫描波束范围更大,则波束个数就有扩展的必要。
1.4 系统工作模式及镜面反射点仿真
由于系统采用多波束相控阵天线,对地/对天的4个波束既可分时工作也可同时工作,如图5所示。镜面反射点轨迹决定了系统的工作模式,因此,系统工作时需要对遥控/自主工作模式、GPS单模/BD单模/GPS+BD双模导航系统、不同天线波束数量进行选择,进行天线波束调度后,制定选星策略,根据LEO卫星轨道信息,进行镜面反射点预测,分别计算出上视/下视相控阵天线的波束指向角度,完成直射信号与反射信号的通道配置,分别输出到相关器单元的对应通道。系统的工作流程如图6所示。
图7是星载情况下系统工作示意图,当可视卫星数目不小于天线的波束数目时,工作在四波束模式(location1);反之,工作在双波束模式(location2)。
设定LEO卫星高度为830 km,相控阵天线的扫描范围为±30°,GPS卫星数量为24颗,BD卫星数量为30颗,进行24 h的镜面反射点仿真。GPS导航卫星单模工作时镜面反射点仿真如图8所示。
BD导航卫星单模工作时镜面反射点仿真如图9所示。
GPS+BD双模工作的镜面反射点仿真如图10所示。双模工作时,因为导航卫星数量较多,所以镜面反射点数量也较单模工作时增加。
此时,如果通过多星组网,可有效地提高时间分辨率,图11显示了4星组网镜面反射点覆盖范围,在24 h内基本可以实现全球覆盖。
2 相控阵GNSS-R测高系统实现
2.1 上视/下视相控阵天线
在整个系统中,相控阵天线是最重要、最复杂的子系统。上视或者下视相控阵天线只有极化方式不同,故下视天线的设计仅辐射元设计与上视天线有差别,其余与上视天线阵列一致。相控阵天线在信号合成时,频率较低时一般采用射频电缆网络,其缺点在于要求电缆长度完全一致,在通道数较多时,网络复杂,电缆数量较多,幅度、相位一致性难以保证,调试、测试工作量大,容易出错。因此相控阵天线在实现时,摒弃了传统的电缆连接方式,通过改用带状线直接进行微波信号合成,整个综合馈电网络的厚度小于3 cm,有效降低了天线的质量和厚度。
整个天线阵面采用层叠式安装结构,如图12所示。依靠蜂窝板将射频前端的64个四通道接收组件、波束控制器、激励器和电源板安装于综合馈电网络板上,并与天线单元相连,集微波信号放大、多通道波束合成、天线指向波控码计算和配相、多波束开关选通于一体。相比使用电缆网络进行馈电,阵面结构简单紧凑,调试容易,电磁兼容性和稳定性好。
2.2 多普勒延迟映射接收机
多通道射频接收单元和相关器单元组成多普勒延迟映射接收机。多通道射频接收单元负责射频信号的分离、变频、放大;相关器单元对工作模式、测量模式进行选择,根据导航定位解等信息完成选星策略和镜面反射点预测,分别计算出上视/下视相控阵天线波束指向角度。同时将中频模拟信号经过高速采集后进行滤波、重量化,再进行直射-反射通道的互相关处理,得到一维时延相关功率谱。图13所示为多普勒延迟映射接收机分层结构及样机实物图。
反射信号的相延多普勒测图(DDM)曲线通常有2种相关处理算法可得:1)clean replica算法,即传统的GNSS-R相关处理算法,将接收到的反射信号和本地生成的CA码或者民用P码进行相干积分、非相干累加;2)干涉式(interferometric)算法,利用的是全码互相关,即将导航卫星上面调制的CA码、P码、M码全部进行混合相关,具体操作是直接将反射信号与直射信号进行互相关操作,由于直射信号和反射信号是同源信号,可得到全码互相关曲线。值得注意的是,全码互相关时,噪声也进行了互相关,所以得到的DDM曲线的噪底较大,信噪比稍微比clean replica算法低一点,这也正是采用干涉式互相关算法时通常会使用高增益天线(>20 dB)的原因。但由于其互相关曲线包含了P码、M码等高速码的自相关信息,其互相关曲线具有更尖锐的尖峰,曲线的斜率也较大,峰值部分的宽度也较窄,更利于寻找精确的镜面反射点位置,所以反演可得到更高的精度。在星载环境下,使用干涉式算法要比传统的clean replica算法获得更好的测高精度。
集成后的GNSS-R测高仪如图14所示。在天线暗室里对相控阵天线进行测试,上视相控阵天线和下视相控阵天线测试结果如表1所示,测试方向图分别如图15和图16所示。根据测试结果,天线增益测试结果基本与理论计算基本一致,在±30°的扫描范围内,天线增益为18 dB,扫描波束角度和波束宽度均满足系统技术指标要求。
整个系统的最终测试结果如表2所示。
2.3 系统安装及搭载方式
相控阵天线传统的安装方式有两种:一种是上视天线和下视天线分开安装,相控阵上视天线安装于卫星平台对天面,相控阵下视天线安装于卫星平台对地面,如图17所示;一种是多波束相控阵天线采用双面一体式安装结构,发射时收拢在卫星本体,在轨时通过驱动展开机构展开至水平,上视天线朝向天顶,下视天线朝向天底,且卫星平台对天线波束无遮挡,如图18所示。这两种方式可根据平台来调整。

表1 上视和下视相控阵天线测试结果
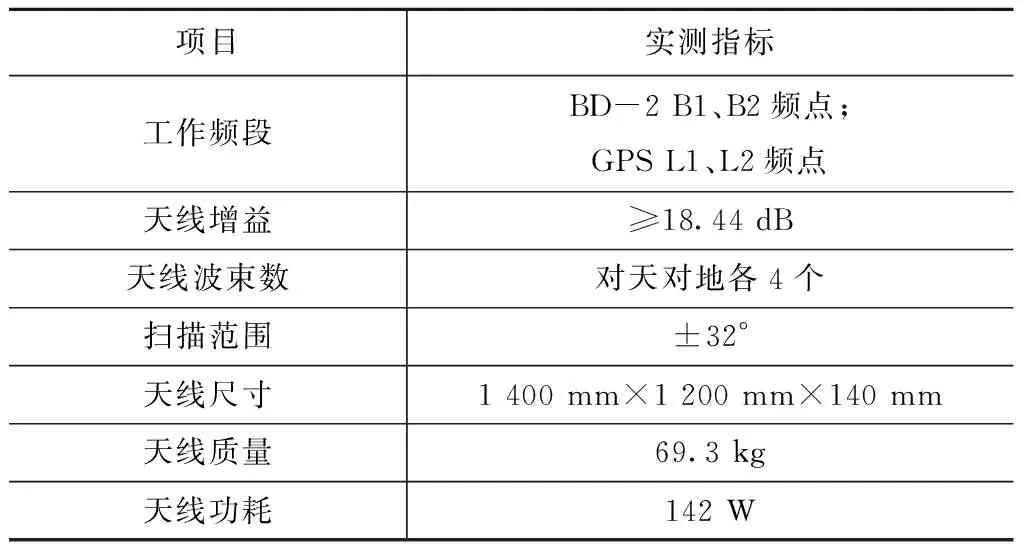
项目实测指标工作频段BD-2B1、B2频点;GPSL1、L2频点天线增益≥18.44dB天线波束数对天对地各4个扫描范围±32°天线尺寸1400mm×1200mm×140mm天线质量69.3kg天线功耗142W
相比传统安装方法,还可以进行载荷平台一体化设计。ESA提出的Cookie卫星,就是将GNSS-R载荷与卫星平台一体化设计,如图19所示。卫星形状是一个扁平的圆柱形,像一块圆形的饼干,上视和下视相控阵天线位于Cookie的中部区域,边缘区域提供载荷电子产品、平台子系统和太阳能帆板,Cookie卫星可以在火箭中垂直层叠安装,实现8颗卫星一箭发射[11]。
3 外场试验及定标实验
在相控阵天线和多普勒延迟映射接收机调试完毕后,开展了外场试验和定标实验工作,用以验证系统的功能、工作流程及软件算法的正确性。具体目的为:
1) 验证系统信息流、链路的完整性和正确性;
2) 验证系统工作模式及软件算法的正确性;
3) 验证输出的互相关功率谱的可用性和正确性。
3.1 外场试验
测高仪系统需安置在临近海岸边的高地、断崖或者距离水面的塔台上,海拔高度大于20 m,安装于海边高地时需要距离海面20 m,外场试验在舟山某海洋站开展,下视天线阵面朝向海面,接收从海面反射回来的反射信号,上视天线阵面朝天放置接收直射导航信号,如图20所示。
测试时,同时通过BDM610导航接收机接收GNSS导航直射信号,并在地面测试设备软件上显示星空视图,如图21所示。海面上的镜面反射点位置如图22所示。
反演时将采集到的数据进行互相关,经过GNSS-R互相关处理得到相关功率曲线,如图23所示。
在外场试验中,GNSS-R测高仪能实现对GNSS直射信号和海面反射信号的接收和处理,验证了系统信息流链路的完整性和正确性、GNSS-R多普勒延迟映射接收机输出的互相关功率谱的可用性、及系统工作模式及软件算法的正确性,同时采集现场海面观测数据,为数据分析和处理提供实验数据。
3.2 定标实验
为了进一步对GNSS-R测高仪测高精度进行定标,利用某单位造波池开展定标实验。将GNSS-R测高仪搭载在造波池上方的桁架上,桁架高度升至20 m,这样可以保证上视天线水平对天,下视天线水平对水面。定标实验开展如图24所示。
随着桁架升高,在升起的过程中,相关峰的形态越来越明显,噪底越来越低,峰值的位置也不断向后移动。当桁架高度处在最低时,即接收机距离水面高度为5 m时,得到的相关功率曲线如图25所示。
峰值位于0点处,与预期的结果一致。随着桁架的高度变化,相关功率峰值点的位置不断变化。由于当前的时延分辨率为1/20 MHz,因此对应的距离分辨率为15 m,不考虑其他的路径延迟(电离
层、对流层等),根据GNSS-R几何关系,接收机距离水面的高度变化约7 m,相关功率峰值将移动一个延迟点。当桁架升高到距离水面7 m时,相关功率峰值点后移(向右移动)一个时延点;当桁架升高到14 m时,相关功率曲线峰值点后移到第2个延迟采样点处。当桁架升高到20 m时,相关功率曲线峰值点后移到第3个延迟采样点处,如图26所示。
实验结果显示:随着桁架高度的升高,测高仪与水面之间的相对距离越来越大,GNSS-R测高仪输出的时延一维互相关功率谱曲线的峰值位置不断后移,信噪比也不断增大。该规律曲线可供水面高度反演使用。通过对微波遥感数据进行处理,与桁架的实测高度进行对比,系统可以达到10 cm的测高精度,符合指标要求,反演精度如表3所示。
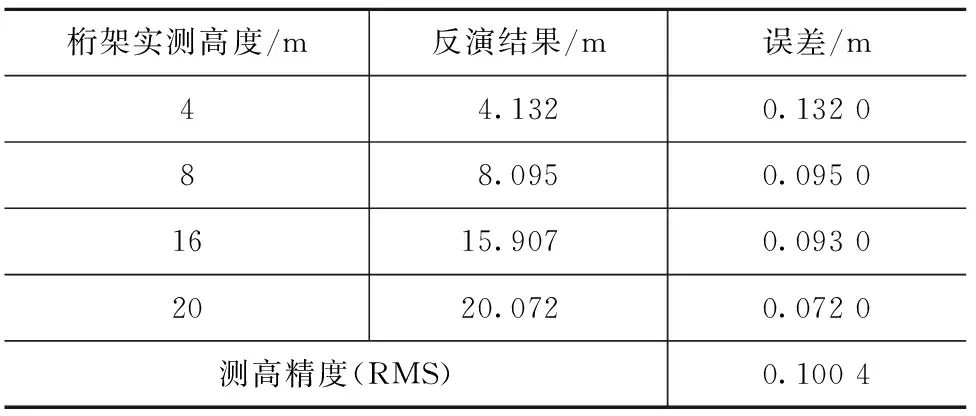
表3 反演高度与实测高度的对应表
4 结束语
从系统层面出发,详细介绍了星载相控阵GNSS-R测高系统的设计与实现、集成和外场试验。验证了相控阵GNSS-R测高系统的功能、工作流程及软件算法。GNSS-R测高系统适用于中尺度海洋现象的观测,可在时间和空间尺度上扩展雷达高度计的观测能力,并与之相互补充,有利于对复杂的海面中尺度结构进行较高时间分辨率的观测,可为我国东南沿海地区的海浪预报、台风预报、海啸预报、潮汐模型提供高时效的微波遥感数据,在海洋环境监测中应用前景广阔。
[1] 李伟强. 面向遥感应用的GNSS反射信号接收处理方法研究[D]. 北京: 北京航空航天大学, 2011.
[2] MARTIN-NEIRA M. A passive reflectometry and interferometry system (PARIS) application to ocean altimetry[J]. ESA Journal, 1993, 17(4): 331-355.
[3] CLARIZIA M P, GOMMENGINGER C P, GLEASON S T, et al. Analysis of GNSS-R delay-Doppler maps from the UK-DMC satellite over the ocean[J]. Geophysical Research Letters, 2009, 36(2): L02608.
[4] CAMPS A, PARK H, DOMNECH E V I, et al. Optimization and performance analysis of interferometric GNSS-R altimeters: application to the PARIS IoD mission[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(5): 1436-1451.
[5] RUF C S, GLEASON S, JELENAK Z, et al. The CYGNSS nanosatellite constellation hurricane mission[J]. IGARSS 22-27 July 2012, 2012, 53(60): 214-216.
[6] FOTI G, GOMMENGINGER C, JALES P, et al. Spaceborne GNSS reflectometry for ocean winds: First results from the UK TechDemoSat-1 mission[J]. Geophysical Research Letters, 2015, 42(13): 5435-5441.
[7] 周晓中, 李紫薇. 机载GPS-R遥感海面风场实验[J]. 解放军理工大学学报(自然科学版), 2011, 12(1): 84-89.
[8] 冯剑锋. 星载GNSS-R互相关处理方法的研究与实现[D]. 北京: 北京航空航天大学, 2014.
[9] WICKERT J, CARDELLACH E, MARTN-NEIRA M, et al. GEROS-ISS: GNSS reflectometry, radio occultation, and scatterometry onboard the international space station[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(10): 4552-4581.
[10] 杨东凯, 张其善. GNSS反射信号处理基础与实践[M]. 北京: 电子工业出版社, 2012.
[11] MARTIN-NEIRA M, LI W, ANDRES-BEIVIDE A, et al. Cookie: a satellite concept for CNSS Remote Sensing Constellations[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(10): 4593-4610.
