基于北斗全球系统的天基测控任务可行性分析
2018-05-09欧阳佶冉旭东孙家豪
谢 羿,欧阳佶,冉旭东,孙家豪,刘 阳
(国防科技大学 系统工程学院,湖南 长沙 410072)
天基测控系统是对运载火箭、低中高轨航天器、战略武器、深空航天器及各类航天飞行器飞行的各个阶段完成测量和控制的系统,是航天工程的重要组成。在实际的天基测控任务中,为了实现对飞行器全空域全时间段的跟踪测控,往往需要借助于中继卫星系统。中继卫星系统是利用高轨卫星实现对中低轨飞行器数据传输和跟踪测轨的空间信息传输系统,是世界航天大国必备的航天基础设施[1]。目前,我国已初步建成多星组网的中继卫星系统,并将不断提高完善,结合我国航天任务的发展及中继卫星系统的特点,明确应用需求,合理规划应用方向,以优化我国天基测控网的结构,提升我国天基测控的能力。
我国目前正在建设的北斗全球系统由地球同步轨道卫星(Geostationary Earth Orbit,GEO),倾斜地球同步轨道卫星(Inclined Geosynchronous Satellite Orbit,IGSO),中圆地球轨道卫星(Medium Earth Orbit,MEO)3层星座组成,其中MEO星座的高度也在两万公里左右,具有中继卫星系统应具备的高覆盖率特性,且北斗全球系统的MEO星座可以全空域覆盖,若天基测控系统可以借助北斗全球系统的导航星座,可以使天基测控系统全空域测控上述各类测控目标,包括运载火箭、高中低轨航天器、战略武器、载人航天器、高轨卫星,甚至深空航天器。本文研究结构如图1所示[2]。
1 测控任务需求分析
天基测控系统跟踪测量与监视控制航天器,是通过接收航天器专用数据信息或载人航天器内航天员语音信息,检测和控制航天器上各种装置和系统的工作,实现航天器状态与运动的测定和控制。
天基测控系统的主要任务可以归纳为4个方面[3]。
(1)跟踪测量运载火箭、航天器的飞行轨迹,获取各分系统的工作和环境状态,对获取的数据加以分析,判断航天器飞行轨道的正确性和航天器对空间环境的适应性,为改变航天器轨道、飞行程序和工作状态及改进航天器设计提供依据。
(2)完成实时控制或程序控制,使航天器达到预定的轨道,得到所需的姿态。
(3)接收航天器内部各分系统的工况参数、反映航天员生理状态的遥测信息以及话音、电视图像等专用信息,航天控制中心对这些信息进行记录、显示、处理,供实时和事后分析使用。
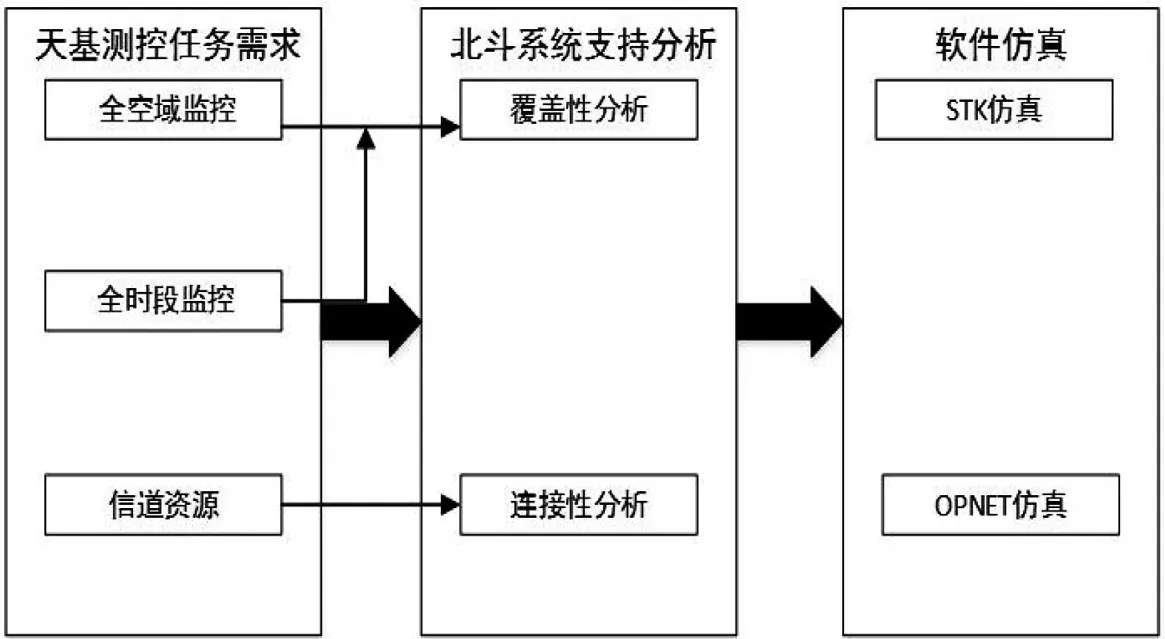
图1 研究结构流程
(4)对于要求高精度定位的应用卫星(如导航卫星、测地卫星、高分辨率侦察卫星),由测控网向用户提供准确的卫星位置(或轨道)数据和相应的时间等数据,作为应用数据处理的基准信息。
天基测控系统由航天控制中心和若干配有跟踪测量、遥控和遥测设备(简称TTC设备)的天基测控站(包括测量船)组成。不管是地基,还是天基,所有的测控资源都由中心来计划、控制和使用,航天控制中心通过测控通信网与各测控站构成一个综合系统。我国天基测控系统由发射和测控中心、若干陆地固定和机动测控站及航天测量船组成。已由UHF,S,C 3个频段TTC设备组成的天基测控系统,具备完成第二代卫星、载人航天工程的测控支持能力。
在对天基测控系统的主要任务进行分析后,将天基测控需求归纳为以下3个方面[4]。
(1)天基测控系统执行全空域实时测控任务需要,此类测控任务为天基测控系统建设所需。
(2)在天基测控系统执行全空域实时测控任务期间,其所处空域超出境内地面站可视空域时,天基测控系统急需与境内站通信联络,以实现实时测控需求。此刻便需要借道其他空间系统星地、星间信道资源,以实现天基测控目标与境内地面站的实时测控要求。
(3)天基测控系统执行全空域实时测控任务时,借道其他空间系统星地、星间信道资源的资源需求[5]。
2 北斗全球系统对天基测控任务分析
2.1 北斗全球系统全球覆盖性分析
北斗全球系统卫星导航系统由GEO,IGSO和MEO 3个星座组成,其中的MEO星座为24颗MEO卫星,采用Walker 24/3/1星座构型。北斗全球系统中MEO星座内任一MEO卫星的信息均可通过星间链路一跳或多跳到达指定地面站,因此,从建链拓扑来看,天基测控系统全空域测控任务可以通过北斗全球系统MEO星座中继后落地境内地面站,即北斗全球系统MEO星座支持天基测控系统全空域测控任务的完成,但须经过一跳或多跳MEO卫星的中继。
北斗全球系统MEO星座具有最佳的全空域覆盖特性,可以满足覆盖包括运载火箭、低中高轨航天器、战略武器、深空航天器等天基测控对象,通过MEO导航星与天基测控对象建立的可视链路,可以实现天基测控系统对测控对象的全空域覆盖,而IGSO星座和GEO星座则不能全空域覆盖天基测控对象。
支撑MEO星座的基于相控阵通道的星间链路技术已经在北斗全球系统试验星之间基本验证成功,可以支持天基测控系统全空域测控对象之间的中间接入。
通过对比分析,对天基测控系统全空域测控任务的支持以北斗全球系统MEO星座支持最佳,IGSO次之,最后才考虑GEO星座。
2.2 北斗全球系统可连接性分析
考虑来自天基测控系统的全空域测控信息并不需要北斗全球系统内部解析[6],为了不增加北斗全球系统额外负担,降低对北斗全球系统影响,北斗全球系统可不对来自天基测控系统的测控信息作任何解析,而是直接转发给天基测控系统或经地面站。尽管如此,为了保障天基测控系统全空域测控信息的中继转发,天基测控系统的数据传输体制还是应该遵循北斗全球系统的协议体系[7]。
如何借道北斗全球系统中的导航卫星实施天基测控目标与境内地面站之间的数据传输,包括通信模式、频段、体制、通信容量、用户终端形式、管控方式、协议规范等方面内容。前三点天基测控系统在设计与研制时可采用与北斗全球系统相同或类似的通信模式。
本文主要从通信容量、用户终端形式、管控方式以及协议规范方面,对北斗全球系统资源的可利用性分析如下[8]。
(1)在通信容量上,根据北斗全球系统两种通信模式不同,基于相控阵天线的单频时分的时域轮询通信模式下的通信容量为:Q支路速率:1 kbps,I支路速率:15 kbps,31 kbps,55 kbps,93 kbps。基于反射面天线的双频频分的全时域通信模式具有较大的通信容量,具体如下:I支路速率:10 kbps,100 kbps,Q支路速率:1 kbps。需要说明的是前期基于反射面天线的通信模式中也有相控阵天线,测距信息速率为2.5 kbps,但主要用于星间测距,难以支持天基测控系统的中继接入,故此不做深入讨论。
无论是基于相控阵天线的单频时分通信模式还是基于反射面天线的双频频分通信模式,用于数传的Q支路最高数传速率可达(或接近)100 kbps,可用于天基测控系统非音视频的低速数据传输。当后期启用星间激光链路后,数传速率将进一步提高。
(2)在用户终端形式与管控方式上,当天基测控系统需要接入北斗全球系统,借助其导航星中继转发天基测控系统任务时,也构成了北斗全球系统的一个用户终端,只不过该天基测控系统用户终端不仅要接收导航星信号,还要发送天基测控系统信号给导航星。形式上天基测控系统地面指控中心可作为北斗全球系统的一个用户终端,实质上天基测控目标是北斗全球系统导航星座中的一颗节点卫星。
(3)在协议规范上,北斗全球系统在协议规范的设计上是从顶层体系出发的,既考虑了国际标准,又兼顾了前期系统,特别是考虑了未来信息系统尤其是空间信息系统之间的兼容互操作,北斗全球系统是支持其他空间信息系统的接入与管控的。
3 软件仿真
根据研究分析的结果,在组网构成上,北斗全球系统的全空域、全时间段覆盖性满足天基测控需求;在系统对接上,北斗全球系统具备足够的兼容性可供天基测控系统借道。故得出北斗全球系统完全可以用来辅助天基测控系统执行一系列测控任务的结论。本文将北斗全球系统作为天基测控系统的辅助平台,在进行模型的搭建与仿真过程中,使用卫星工具包(Satellite Tool Kit,STK)仿真软件建立北斗全球系统网络模型。北斗全球导航卫星系统空间段部分由MEO星座、IGSO星座和GEO星座组成,MEO星座包括相差120°、倾角55°的3个MEO轨道面,每一轨道面上布局8颗MEO工作卫星和1颗MEO备份卫星;IGSO星座也包括相差120°、倾角55°的3个IGSO轨道面,每一轨道面上布局1颗IGSO卫星,3颗IGSO卫星在地面的投影重合;GEO星座包括5颗GEO卫星。
北斗全球导航卫星系统地面控制段部分由1个主控站MCS、1个备份主控站BMCS、3个注入站ULS、7个一类境内监测站MOSA(或称定轨与时间同步监测站)、5个一类境外监测站MOSB、30个二类监测站MOSC(广域差分与完好性监测站)等组成。考虑北京站、喀什站、三亚站。地面网由连接北京、喀什和三亚站的TCP/IP的网络组成,仿真对地面网络建模进行了简化,重点在空间阶段。
建立北斗全球系统的STK模型后,将相关轨道信息导入OPNET以便进行具体通信过程的仿真。仿真任务以低轨卫星LEO为测控目标,MEO和GEO分别作为辅助执行测控任务的中继卫星。仿真目的是获取LEO在MEO和GEO作为中继卫星时的传输时延等测控性能指标信息。
通过OPNET建立测控模型进行通信过程分析,MEO和GEO的传输时延结果对比如图2所示。

图2 MEO与GEO测控传输时延对比
4 结语
通过仿真发现,尽管北斗全球导航系统中的MEO具备良好的覆盖性,通过其可以较好地满足天基测控系统全空域测控的需求,但同时由于其相对高速的运动性和较多的卫星数目。使得在测控过程中会出现星间跳数较多的情况以致在测控信息传输的延迟方面相对GEO并没有过于明显的优势(从图2可见,除了最开始的12个小时内具有较为明显的低延迟优势,剩余时间优势均较小甚至第一天的后12个小时处于劣势)。故在下一步的工作中,提高星间链路的通信速率以及优化MEO星间链路路由传输策略就成为了解决灵活性与低延迟同步优化的核心环节。因此,若天基测控系统借道北斗全球系统导航星中继转发这些测控数据,不仅要求北斗全球系统具有基于星间链路支持的全空域组网能力,还要求北斗全球系统的星间链路具有较高传输能力。
[参考文献]
[1]李艳华,卢满宏.天基测控系统应用发展趋势探讨[J].飞行器测控学报,2012(4):1-5.
[2]翟桅,张国柱,雍少为.基本星座下北斗卫星导航系统服务性能分析[J].全球定位系统,2011(4):56-60.
[3]郑淑花.导航定位系统的天基测控应用[C].北京:中国宇航学会飞行器测控专业委员会航天测控技术研讨会,2005.
[4]张强,裴胤,王小辉.基于中继卫星的运载火箭天基测控系统研究[J].遥测遥控,2014(1):18-22.
[5]杨天社,董小社,席政,等.低轨航天器天基测控方法研究[J].空间科学学报,2007(3):245-249.
[6]SHANG Y,HADJITHEODOSIOU M.TCP splitting protocol for broadband aeronautical satellite network[C].Salt Lake City:Digital Avionics Systems Conference,2004:3-9.
[7]TC Space Data Link Protocol.Recommendation for space data system standards[S].Washington CCSDS 232.0-B-2,2010.
[8]刘基余.北斗卫星导航系统的现况与发展[J].遥测遥控,2013(3):1-8.
