基于颜色和边缘信息的车牌定位方法研究
2018-05-07郭海富帅鹏举王霞
郭海富 帅鹏举 王霞
【摘 要】为实现车牌的准确定位,本文提出了一种基于车牌颜色和边缘信息结合的车牌定位方法。该方法包括预处理、颜色特征提取、边缘与颜色特征融合,车牌候选区域筛选四个步骤。其二值化使用了一种对光照不敏感的基于颜色特征的方法,解决了车牌区域对光照变化敏感的问题。通过模拟实验,使用不同光照、不同尺寸、不同背景下的130张图片进行车牌定位实验,定位成功率超过95%。
【关键词】车牌定位;颜色信息;数学形态学;边缘检测
中图分类号: TP391.41 文献标识码: A 文章编号:2095-2457(2018)05-0198-002
【Abstract】In order to achieve the accurate positioning of license plates, this paper proposes a license plate location method based on the combination of license plate color and edge information. The method includes four steps: preprocessing, color feature extraction, edge and color feature fusion, and license plate candidate area screening. The binarization uses a method based on color features that is insensitive to light, and solves the problem of license plate area sensitivity to light changes. Through simulation experiments, 130 license plate images with different lighting, different sizes, and different backgrounds were used to perform license plate positioning experiments. The success rate of positioning was over 95%.
【Key words】License plate location; Color information; Mathematical morphology; Edge detection
0 引言
近年来,随着国内外汽车拥有量的增长,停车难已经成为亟待解决的一大社会问题,车牌自动识别系统已经成为未来智能交通的重要研究课题。车牌定位作为车牌识别三大关键技术之一,在整个车牌识别系统中占有核心地位,直接影响车牌识别的成败。
目前主要的定位算法有:基于颜色特征[5]、基于紋理特征[2-6]、基于神经网络[1]、多特征结合[3-7]的定位算法。基于颜色的定位算法比较简单且易实现,但会受到光照、拍摄条件、背景等因素的影响。基于纹理特征的定位方法大多利用车牌字符拥有丰富的边缘,使用如跳变点检车等方法进行定位,但当处于复杂背景下的车牌定位时容易受到干扰。因此本文提出了一种车牌颜色与边缘特征相融合的定位方法,利用RGB颜色空间提取符合车牌颜色的区域,再通过Sobel边缘检测提取车牌边缘信息,根据车牌的颜色信息和边缘信息融合后进行形态学提取车牌疑似区域,然后使用车牌规整度计算[7]进行车牌区域的筛选,从而准确定位车牌区域。
1 颜色特征提取
1.1 图像预处理
对图像的预处理包含高斯模糊和灰度化处理;高斯模糊相对模糊滤波、运动模糊等算法会让图像更加平滑,且具有降噪效果降低了噪音点对定位的干扰。采用加权平均值法对拍摄的车辆图像进行灰度化处理,其数学表达式如(1)所示:
Y=0.299R+0.587G+0.114B(1)
R、G、B分别表示RGB颜色空间的r,g,b值,Y表示像素点灰度值。
1.2 颜色特征提取
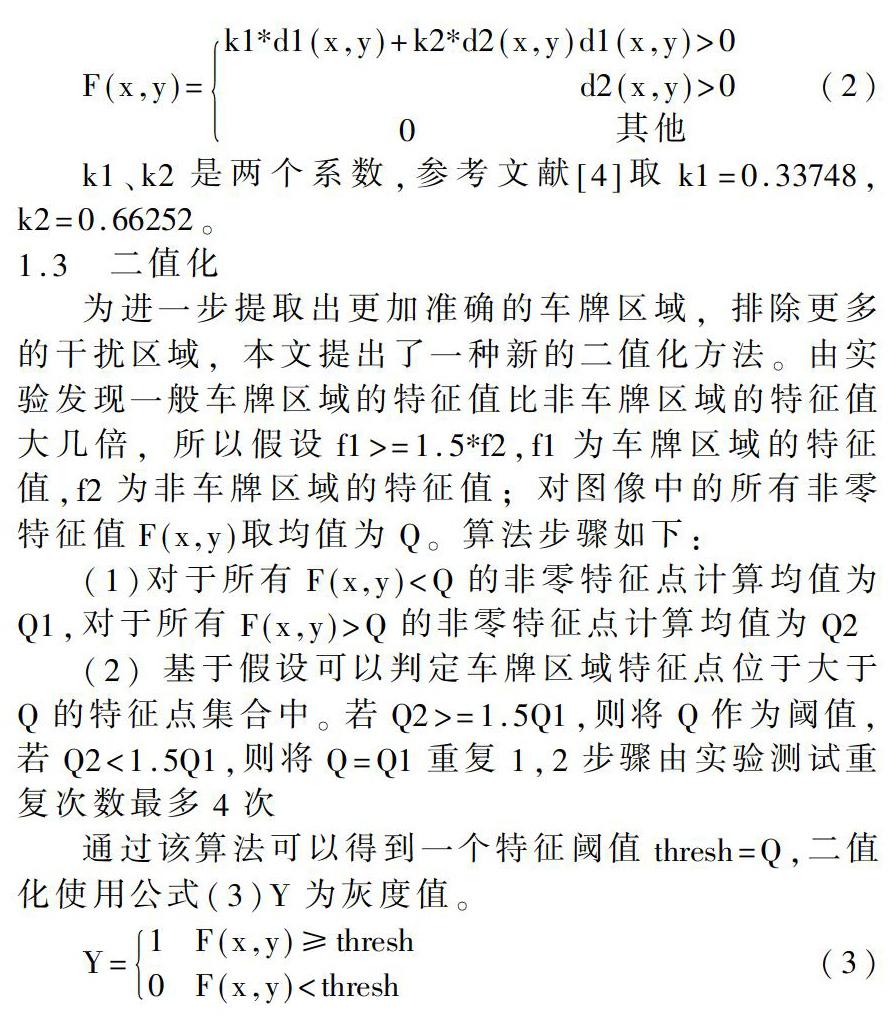
在RGB颜色空间下,蓝色点的b值一定大于r与g值。对于像素点(x,y)记d1=b(x,y)-r(x,y),d2=b(x,y)-g(x,y),按照公式(2)[4]计算该像素点的特征值F(x,y)。
k1、k2是两个系数,参考文献[4]取k1=0.33748,k2=0.66252。
1.3 二值化
为进一步提取出更加准确的车牌区域,排除更多的干扰区域,本文提出了一种新的二值化方法。由实验发现一般车牌区域的特征值比非车牌区域的特征值大几倍,所以假设f1>=1.5*f2,f1为车牌区域的特征值,f2为非车牌区域的特征值;对图像中的所有非零特征值F(x,y)取均值为Q。算法步骤如下:
(1)对于所有F(x,y)
(2)基于假设可以判定车牌区域特征点位于大于Q的特征点集合中。若Q2>=1.5Q1,则将Q作为阈值,若Q2<1.5Q1,则将Q=Q1重复1,2步骤由实验测试重复次数最多4次
通过该算法可以得到一个特征阈值thresh=Q,二值化使用公式(3)Y为灰度值。
Y=1 F(x,y)≥thresh0 F(x,y) 2 结合边缘信息进行初定位 2.1 边缘信息提取 本文采取Canny、Soble、Laplace三种算子进行对比实验如图2,发现相对于其他边缘检测算子,Sobel算子得到的图像处理效果较好,车牌中的字符能被清晰的“描绘”出来且速度较快。所以本实验采用Sobel算子进行边缘信息提取。
2.2 信息融合
需要提取的区域为根据颜色信息二值化和根据边缘信息二值化灰度值都为1的区域,使用公式(4)进行计算。
Y(x,y)=C(x,y)&O;(x,y)(4)
Y(x,y)表示提取出的融合图像中(x,y)点的灰度值,C(X,y)表示根据颜色信息二值化的图像的灰度值,O(x,y)表示根据边缘信息二值化的图像的灰度值。如图3a、b、c可以发现融合颜色信息二值化和根据边缘信息二值化的图像后干扰区域大幅度减少。
2.3 形态学操作
形态学操作的效果取决于模版大小的设置,如若模版过小,容易出现断节如图4,也不能设置过大,若过大会出现过多粘连如图5。多次实验以后,本文发现先使用25*2模版的形态学闭运算,然后再次使用5*2和2*5的形态学开运算效果较好,能够有效的去除背景中的孤立噪音并且让车牌区域很好的连接在一起[9]。车牌位置处于水平状态所以对于倾斜超过30°的区域给予排除,最后得到一个或多个疑似车牌区域。
3 区域筛选
实验发现车牌宽高比大致范围在2.5~7.5之间,按照这个比例先做一个区域粗筛选,剔除掉一些过大或者过小的区域。由于车牌区域中,最稳定的特征为车牌字符个数及宽度,所以本文采用文献[4]中车牌规则度检验的方法来筛选出最终的车牌。
4 实验结果及分析
为测试算法的有效性,选取了不同(下转第205页)(上接第199页)环境下不同质量的130张图片进行测试,测试结果表明,定位准确率达到95%以上。部分未成功识别的图片是因为测试使用图片过于老旧分辨率过低或车牌与车身颜色对比度较低导致失败。
5 结束语
本文提出了一种基于颜色和边缘信息的车牌定位方法。在RGB颜色空间下提取颜色特征,根据颜色特征提出了一种新的二值化方法,得到二值化图像后融合边缘检测信息消除了一部分干扰区域,通过形态学确定车牌的疑似区域,最后使用车牌规则度检验的方法来筛选出最终的车牌区域。本方法对光照不敏感,对复杂背景适应性好,适用不同尺寸的图片。该算法还存在一些不足,对于车牌与车身颜色对比度较小或褪色严重的车牌定位往往失效。
【参考文献】
[1]李字成,杨光明,王目树.车牌识别系统中关键技术的研究[J].计算机工程与应用,2011,47(27):180-184.
[2]熊军,高敦堂,沈庆宏,都思丹.基于字符纹理特征的快速定位算法[J].光电工程,2003,30(2):60-63.
[3]杨硕,张波,张志杰.多特征融合的车牌定位算法[J].计算机应用,2016,36(6):1730-1734.
[4]郑成勇.一种RGB颜色空间中的车牌定位新方法[J].中国图象图形学报,2010,15(11):1623-1628.
[5]李文举,梁德群,张旗,等.基于边缘颜色对的车牌定位新方法[J].计算机学报,2004,27(2):204-208.
[6]刘晓薇.基于字符纹理的车牌定位算法[J].南昌大学学报,2008,32(6):601-604.
[7]Hao-kui Tang,Ming-junLiu,han-pingQiao.License Plate Location Based on Multi-Agent[J].Electronic and Computer Science, 2009:611-615.
[8]薛凌云,朱志強.基于颜色和边缘信息融合的车牌定位方法[J].杭州电子科技大学学报(自然科学版),2015,35(6): 14-17.
[9]陈佳.基于形态学的车牌定位方法的研究与应用[D].南华大学,2015.
