基于轮廓线聚类分析的船舶超吃水检测
2018-05-07薛双飞
谢 磊, 薛双飞, 黄 立, 包 竹
(武汉理工大学 国家水运安全工程技术研究中心,武汉 430063)
基于轮廓线聚类分析的船舶超吃水检测
谢 磊, 薛双飞, 黄 立, 包 竹
(武汉理工大学 国家水运安全工程技术研究中心,武汉 430063)
针对在船舶吃水检测中采用人工登船测量法工作量大、实施效率低等问题,归纳分析现有的船舶吃水状态自动检测技术。从检测的准确性和可行性出发,采用岸基检测法获取船舶激光点云数据;通过一种基于聚类分析的船舶水面轮廓重构方法剔除激光检测产生的大量噪声点,完成船舶水上部分三维重构;结合船舶静态信息推算出船舶吃水状态。试验结果证明,该方法能快速准确地获取船舶三维重构图,可作为船舶超吃水检测手段。
激光点云;吃水检测;模糊C-均值聚类;三维重构
船舶超吃水航行是引发搁浅、触损和沉没等水上交通事故的主要原因之一。长期以来,一些船舶运营单位和船舶所有人为追求经济效益而忽视安全问题,不按照航道维护水深进行配载,一旦发生事故,往往会造成航道损害乃至船沉人亡的悲剧。对此,如何准确有效地判断船舶吃水情况受到相关单位的高度重视。目前,海事管理机构主要通过人工测量进行超吃水检测,一般采用上船查看水尺、到舱内实际丈量等方法,误差较大。特别是有些船舶没有水尺,或水尺不准确,致使航道行政管理人员难以掌握船舶的实际吃水情况,不能取得真实有效的证据。
随着科学技术的不断发展,技术融合和新型服务开始产生,航运安全监管技术装备更新换代的速度不断加快。[1]在船舶吃水状态自动检测领域,已有很多学者进行深入研究,提出多种实用化方法。这里对这些方法进行归纳和分析,提出基于轮廓线聚类分析的船舶吃水检测方法,以提高海事管理部门对船舶载货状态的监测效率。
1 现有船舶吃水状态检测技术
国外对航道疏浚的投入很大,对船舶吃水的管理非常严格,一 旦发现有船舶因违规而搁浅,将处以重罚,因此国外的船舶很少出现超吃水现象。而在国内,船舶超吃水的检测手段和管理方式仍然比较落后,现有的船舶超吃水检测方法大多停留在理论和试验阶段,尚未得到全面推广。按工作位置的不同,可将现有的超吃水检测方法分为船基检测、水下检测和岸基检测等3类。
1.1 船基检测法
利用水压力测量船舶吃水状态的方法[2]为:在被测船舶两舷的被测点位置安装钢架,在钢架上固定压力传感器;船舶吃水不同,利用压力传感器测得的压力数值也不同,这样就可根据船舶实际情况设置压力警报,从而判定船舶是否处于超吃水状态。
浮子式船舶吃水检测法也能达到上述效果。在该方法中,检测腔底部与船舶外部水连通形成连通器,浮子开关悬吊在连通器内,其高度与船舶载重线的高度相同。浮子通过电路与外部的电源连接形成闭合回路,若船舶的载重量超过标准,浮子随着连通器水位的上升而上升,触发判断单元工作,一旦判断出导电计时器达到计时要求,即认定船舶超吃水。[3]
1.2 水下检测法
利用多波束声呐对船舶超吃水进行检测,首先需在航道两侧水底对称布放2台多波束声呐设备,对航行的船舶进行波束扫描[4];然后对船体回波进行接收和计算,得出船舶的吃水深度及船体的形状特性;最后通过对比船舶最大吃水深度判断船舶是否超吃水。陈德山等[5]通过收放缆绳来控制载有多波束声呐探测设备的铝合金桁架的放置姿态,使声呐始终保持向上仰角的姿态,克服船舶吃水深度不同造成的船舶吃水状态测量困难。
超声检测又可分为单点检测和阵列检测。在单点检测中,分别将单波束声波发射器和声波接收器安装在河岸两侧,当船舶经过时,收发器可沿着导轨上下往复运动并收发声波。根据声波接收器所输出声强的大小即可推断测量装置与船舶位置的遮挡关系,进而得出船舶底部轮廓线。[6]浙江湖州市港航管理局研究的“船舶超载量化检测系统”[7]首先利用布置于航道两侧及底部的超声波阵列扫描过往的船舶,其次应用三维重建技术获得船舶水下部分的三维轮廓图案,最后根据船舶重建形体特征推断过闸船舶的超吃水情况。
1.3 岸基检测法
利用计算机视觉技术识别水尺也能实现船舶吃水检测。该方法首先利用摄像机获取船舶水尺图像,然后对该图像进行识别和处理,进而得到吃水深度。然而,由于现场场景复杂,所得图像中并不一定包含水尺线。因此,一些研究者[8]提出基于类Haar特征和Gentle Adaboost算法的吃水线、船舷线检测方法,在手动标定某一位置的标准船舶载重干舷之后,通过将该位置的实际干舷值与标准载重干舷值相比较来判断船舶是否超吃水。
激光测量一般将激光雷达作为吃水检测的核心设备,将激光雷达布置在桥梁等便于测量的位置,对在航船舶的舷侧进行测绘并快速获取其3D图像数据。通过软件处理之后与船舶基础数据相比对,判定船舶是否超吃水。[9]
2 现有船舶吃水状态检测方法分析
针对上述检测方法,对各自的优点和缺点进行比较,结果见表1。
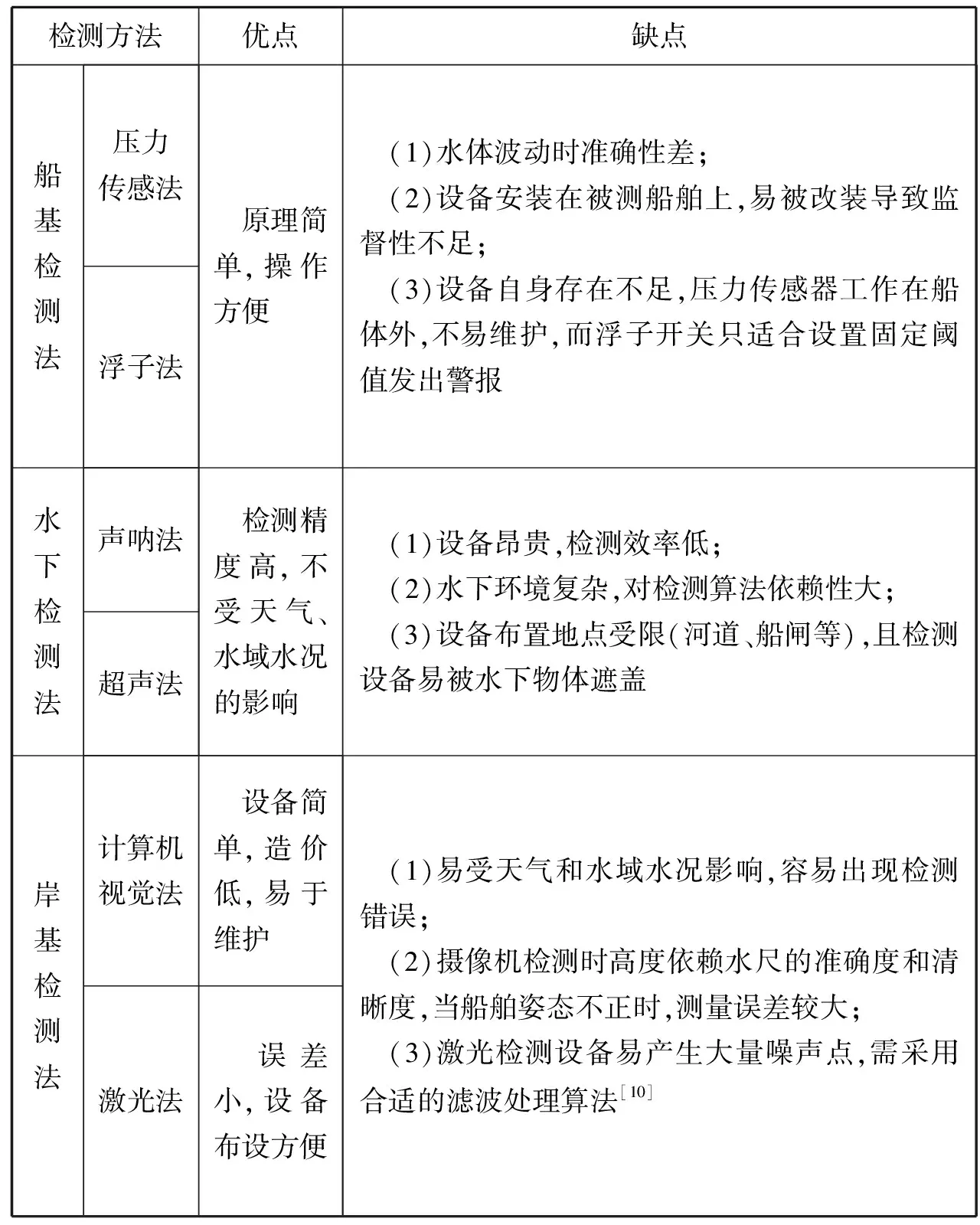
表1 船舶吃水状态检测方法比较
由表1可知,检测设备的位置对实施过程和检测效果都有很大影响。基于船舶自身的吃水状态检测方法虽然原理简单、实施容易,但由于安装在待测船舶上,除了需经常检修以外,利益相关方还可能对测量数据进行篡改,进而使设备失效。
采用水下检测方法能直接测得船舶的吃水状况,但设备安装地点受到很大限制,大多只能安装在港口、人工河道等相对空间较小的区域,某些方案还需滑轨电机等辅助设备,给检测和维修带来很大困难。
相对而言,采用岸基检测法虽然不能直接得出船舶吃水状态,但可获取船舶水上部分的高度,再结合船舶静态参数即可推测出该船的吃水状态。计算机视觉法则高度依赖于图像质量。在船舶航行过程中,时常遇到阴天、大雾等能见度较低的情况,此时拍摄效果较差,会对目标识别产生影响。[11]
本文采用基于激光数据的岸基检测法,提出一种基于聚类分析的船舶水面轮廓重构方法,能快速消除激光测量带来的噪声点,从而为船舶超吃水检测提供准确的数据支持。
3 基于轮廓线聚类分析的船舶吃水激光检测
3.1 检测方案
将激光传感器放置在桥梁下方A点处,同时将船舶自动识别系统(Automatic Identification System,AIS)船载终端安装在船上的F区。在没有船舶通过时,激光向下扫描得到水面数据;在有船舶经过时,扫描到的数据分为3段,BC段和DE段仍是水面数据,而CD段是船舶的水上轮廓数据。激光传感器将船舶水上轮廓数据送至处理中心,处理中心结合AIS船载终端主动发送的船长、船宽、型深及吃水等船舶静态数据,即可估算出船舶的吃水情况,整个检测方案见图1。

图1 激光扫描检测示意
3.2 基于聚类分析的船舶轮廓提取方法
通过聚类分析,可从激光扫描数据中准确提取出船舶的轮廓线,并剔除其中的噪声。
聚类分析以数据间的相似性为基础,采用统计分析方法研究数据的分类问题。聚类算法分为硬聚类算法和软聚类算法2种,本文采用软聚类算法中的模糊C均值聚类算法[12-13],即FCM算法(Fuzzy C-Means Algorithm)。
FCM算法是一种比较典型的模糊聚类算法,可将多维数据空间分布的数据点分成特定数目的类。[14]该算法可通过优化目标函数得到各样本点对所有类中心的隶属度,从而决定样本点的类属,进而达到自动对样本数据进行分类的目的。
在利用FCM算法时,首先需确定聚类的数目m,要求0≤m≤n,其中n为数据点总数。对船舶吃水检测而言,一般可取m=2。设P(b)为初始对象聚类模型,b为迭代计数,ε为迭代阈值。

(1)

(2)
然后计算矩阵P(b+1),有
(3)

采用FCM算法,需确定每个数据点归属于某个聚类的隶属度函数,一般用U=[uij]表示,其中:ui0为该点属于船舶的隶属度;ui1为该点属于水面的隶属度。隶属度函数定义为
(4)
式(4)中:H为水面到激光传感器的距离;h为所有扫描数据中距离激光传感器最近的点。当hi=H时,ui0=0,ui1=1,该数据点隶属于水面;当hi=h时,ui0=1,ui1=0,该数据点隶属于船舶;当h≤hi≤H时,ui0,ui1∈[0,l]。
在所有的激光扫描数据中,始终将水面数据的聚类中心设定为H点,而船舶数据的聚类中心初始点为h点。当有一个新的数据点被判断隶属于船舶数据之后,船舶数据新的聚类中心即为该点与初始点间的中点;当又有一个新的数据点被判断隶属于船舶数据之后,按照相同的方法继续迭代,直到计算出聚类中心矩阵为V={v1,v2,…,vn},再根据式(5)计算目标函数。
(5)
目标函数可视为聚类中所有数据点到聚类中心的加权距离的平方和。当该目标函数收敛到一个极小值时,即可认为已得到这些有效数据点的一个最优的C-均值聚类划分。
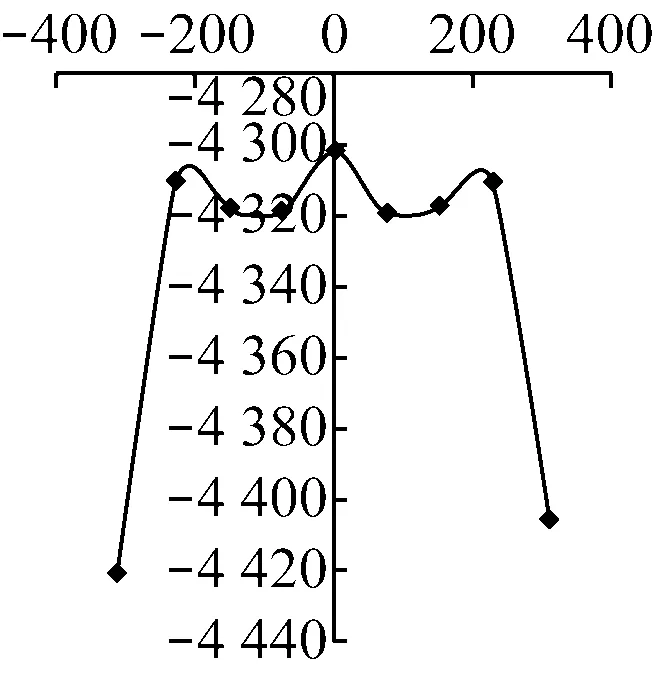
取艏部的一帧激光扫描数据作为样本,对其进行模糊C-均值聚类,将代表水面的数据点和代表船舶轮廓的数据点分开。通过对FMC算法的聚类中心进行不断迭代,最终确定2个最优的聚类中心见图2。

图2 聚类中心分布
分别取艏部、舯部及驾驶台的单帧数据进行聚类处理,可得到处理效果见图3。

a)艏部
b)舯部
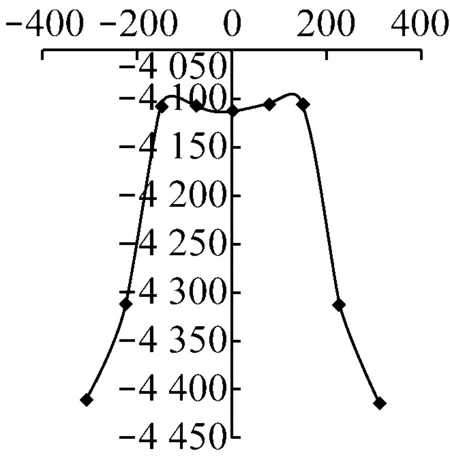
c)驾驶台
3.3 船舶三维建模及吃水检测
三维重构技术[15]是指对三维物体建立适合计算机表示和处理的数学模型,既是在计算机环境下对其进行处理和操作并分析其性质的基础,也是在计算机中建立表达客观世界的虚拟现实的关键技术。
本文基于激光扫描得到的点云数据,根据点云数据自身的特征,对点云进行三角化,实现对目标轮廓影像的再生,最终得到某采砂船的三维模型见图4。
a)b)
图4 某采砂船的三维重构效果
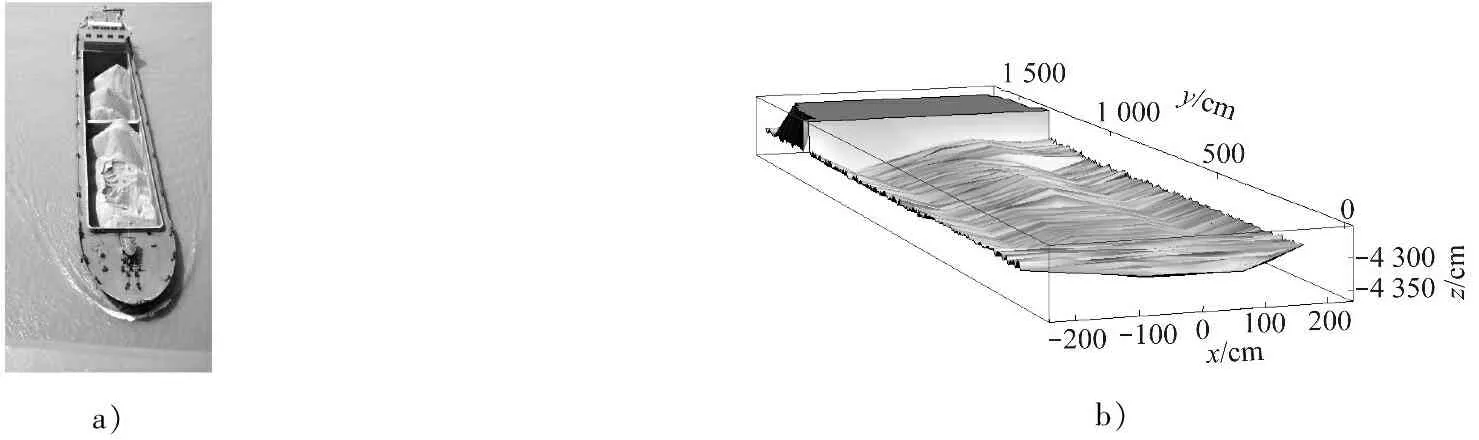
采用同样的处理方法可获取其他类型船舶的三维重构效果图。图5为某空载货船的三维重构效果。
结合上述2艘货船的AIS静态信息,可得检测结果见表2。
由上述检测结果可知,这些船舶的测量水上高度比理论水上高度略小,这可能是由水面波动影响造成的。测量结果基本上能反映实际情况,有较高的参考价值。

a)b)

图5 某空载货船的三维重构效果
4 结束语
本文归纳总结了现有船舶吃水自动检测技术,分析了各方法的优劣,最终确定采用将激光传感器放置在桥梁下方扫描过往船舶的测量方法。针对激光检测设备容易产生大量噪声点的问题,提出基于聚类分析的船舶轮廓提取方法。对经该方法处理的激光点云数据进行三角化处理,即可实现对目标轮廓影像的再生,得到船舶水上部分三维模型。最后,结合船舶静态信息计算出船舶吃水状态。
经实际验证,利用本文方法可准确得到船舶的水上高度,从而推断目标船是否违规装载。该方法可提高海事监管效率,减少船舶安全事故发生。
[1] 孙星,吴勇,初秀民. 船-标-岸协同下智能长江航运及其发展展望[J]. 交通信息与安全,2010(6):48-52.
[2] 严奇,陈卫民,汪伟. 货运船舶超载报警系统仪的研制[J]. 仪器仪表学报,2006(S1):228-229.
[3] 姜宾彬,魏海军,郑慧敏. 基于浮子式船舶超载远程监控系统的研究[J]. 科技致富向导,2014(15):202-203.
[4] 黄其培. 基于多波束声纳的船舶超载检测系统设计[J]. 舰船电子工程,2016(10):126-131.
[5] 陈德山,朱剑华,李吉祥,等. 基于多波束仰扫的内河船舶吃水检测技术[J]. 水运工程,2016(1):152-157.
[6] 吴俊,丁甡奇,余葵,等. 船舶底部纵剖轮廓线扫描测量方法[J]. 交通运输工程学报,2014(2):62-67.
[7] 吴显德,闵雪明,黄启春. 内河船舶超载量化检测系统设计探讨[J]. 工业控制计算机,2009(6):55-56.
[8] 王炎龙,陶青川. 基于计算机视觉的运砂船超载状态检测[J]. 现代计算机(专业版),2014(32):49-54.
[9] 王茹军,陈俊,熊辉,等. 船舶超载吃水监测系统设计与实现[J]. 交通科技,2015(2):157-160.
[10] SEDEK M, SERWA A. Development of New System for Detection of Bridges Construction Defects Using Terrestrial Laser Remote Sensing Technology[J]. The Egyptian Journal of Remote Sensing and Space Science, 2016(19): 273-283.
[11] 李祎承,胡钊政,初秀民. 基于图像处理的内河船舶目标提取与特征值计算[J]. 交通信息与安全,2015(3):1-8.
[12] KESEMEN O, TEZEL Ö, ÖZKUL E. Fuzzy C-Means Clustering Algorithm for Directional Data (FCM4DD) [J]. Expert Systems with Applications, 2016, 58:76-82.
[13] REYES-GALAVIZ O F, PEDRYCZ W. Enhancement of the Classification and Reconstruction Performance of Fuzzy C-Means with Refinements of Prototypes[J]. Fuzzy Sets and Systems, 2016.
[14] 王璇,翁小雄. 基于模糊C均值聚类的快速路交通流相态划分[J]. 交通信息与安全,2009(1):149-152.
[15] ZHANG T, LIU Jianhua, LIU Shaoli, et al. A 3D Reconstruction Method for Pipeline Inspection Based on Multi-Vision[J]. Measurement, 2017, 98: 35-48.
DraughtMonitoringBasedonContourClusterAnalysis
XIELei,XUEShuangfei,HUANGLi,BAOZhu
(National Engineering Research Center for Water Transport Safety, Wuhan University of Technology, Wuhan 430063, China)
Manually checking the draught of a ship can be inconvenient and inefficient. The automatic monitoring technology based on contour analysis is proposed which produces 3D image of the hull with the point cloud from the laser scanner. With the image the system can find the draught of the ship through checking the contour of the above water part of the hill against its drawing. The cluster algorithm is used for getting rid of measurement noises. Tests prove that the design works satisfactory with high accuracy and quick response.
laser point cloud; draught monitoring; fuzzy c-means algorithm; 3D reconstruction
2017-10-25
国家自然科学基金(51479158);交通运输部应用基础研究项目(2013329811220)
谢 磊(1975—),男,辽宁海城人,副教授,博士,研究方向为水上交通信息感知与控制技术。E-mail:xielei@whut.edu.cn
1000-4653(2018)01-0060-04
U665.26
A
