内河典型水域船舶领域特征
2018-05-07文元桥郑海涛周春辉肖长诗
文元桥, 李 通, 郑海涛, 黄 亮,2, 周春辉,2, 肖长诗,2
(1. 武汉理工大学航运学院, 武汉 430063; 2. 内河航运技术湖北省重点实验室, 武汉 430063;3. 国家水运安全工程技术研究中心, 武汉 430063)
内河典型水域船舶领域特征
文元桥1,2,3, 李 通1, 郑海涛1, 黄 亮1,2, 周春辉1,2, 肖长诗1,2
(1. 武汉理工大学航运学院, 武汉 430063; 2. 内河航运技术湖北省重点实验室, 武汉 430063;3. 国家水运安全工程技术研究中心, 武汉 430063)
为获取内河典型水域的船舶领域特征,利用船舶历史轨迹数据建立统计模型。通过网格化目标船周围水域,计算每一时刻下目标船周围距其最近的他船所占的网格,叠加每时刻下他船的网格分布,得到单船的网格密度图,对同一长度类型的船舶的网格密度图进行叠加,得到特定类型船舶的网格密度图。观测该网格密度图和分析该网格密度数据,得到特定类型船舶领域的形状和大小。分析结果表明:在内河典型水域,船舶领域的形状和尺度均与传统的基于理论分析的领域形状和尺度及海上自由航行水域船舶领域的形状和尺度有较大的区别。内河水域船舶的领域形状受船舶行为影响明显,呈非对称椭圆状,且椭圆长轴与船首向平行。船舶领域长度为船长的2.5~3.5倍,船宽的16~21倍;船舶领域宽度为船长的1.5~2.0倍,船宽的9~12倍。
船舶领域; 内河典型水域; 历史轨迹数据; 网格密度图
船舶领域[1]是指本船为保证航行安全,不许他船进入的本船周围的一片水域,广泛应用于船舶避碰和船舶航行风险评估等领域中。
在海上船舶研究领域,GOODWIN[2]在对北海南部水域进行海上交通观测和利用雷达数据进行统计研究之后,在考虑国际海上避碰规则影响的基础上,建立开阔水域的船舶领域模型,该船舶领域由船舶号灯划分的3个不等扇形组成。此后,DAVIS等[3-4],VAN DDR TAK等[5]和COLDWELL[6]对藤井和GOODWIN提出的船舶领域模型进行改进和完善。KIJIMA等[7-8]提出基于阻挡区域和瞭望区域的船舶领域,考虑船舶操纵参数和船速的影响,但未考虑人和环境的因素。WANG[9]结合模糊集理论,提出了模糊四元船舶领域模型,用于船舶空间碰撞危险度的评价,所得结果具有一定的优越性。PIETRZYKOWSKI[10]采用人工神经网络,提出动态模糊船舶领域模型,将人的经验数据和船舶的因素融入到模型中,但未考虑环境因素。周丹等[11]利用人工神经网络研究船舶领域与其影响因素间的关系,考虑因素比较全面,所得结果具有较好的拟合度。
在内河水域船舶研究领域,大多数研究集中于构建船舶领域与船舶自身属性的关系方面。贾传荧[12]通过研究受限水域内船舶领域大小与船舶航速、船舶尺度之间的关系,提出受限水域内可变尺度的船舶领域。廖河树等[13]在考虑船舶操纵性能和航行环境的影响之后,建立船舶在狭水道航行的球场式船舶领域,其尺寸是与本船船长、船宽和航速相关的函数。徐周华等[14]通过对我国内河船舶操纵与避碰的特点进行分析之后提出船舶领域三维模型的设想,该船舶领域与本船的大小、运动性能、水域及与他船的相互位置关系等因素有关。陈厚忠等[15]结合水动力学和船舶操纵性能,对船舶通过桥区的可行性进行分析,建立矩形船舶领域模型,其尺寸与桥墩宽度、船宽和单双向通航等因素有关。范贤华等[16]基于水流条件对船舶航行的影响,提出一种改进的船舶领域模型。
随着现代自动识别系统(Automatic Identification System,AIS)技术的兴起,基于AIS的船舶领域研究变得越来越有意义,齐乐等[17]利用琼州海峡航行船舶的AIS数据,通过数理统计和模糊数学方法,获得不同避让度下船舶领域的边界曲线,建立海上船舶领域模型。HANSEN等[18]和向哲等[19]利用AIS数据,分别对丹麦与德国之间的Fehmarn Belt水域和受限水域内的船舶领域模型进行研究,所得结果的差异表明航行环境对船舶领域模型有较大的影响。
通过以上研究可知,目前对船舶领域的研究方法主要分为基于统计分析、基于解析表达和基于智能技术等3种,其中:统计分析法所采用的数据为雷达观测数据,信息量少,因此所得结果不够精确;解析法在构建船舶领域模型时虽然考虑了船舶本身的操纵特性,但忽略了船舶驾驶员和环境因素对船舶领域的影响;基于智能技术的方法还只是使用简易模型,对人为因素和航行环境等复杂因素还远未考虑到。
此外,在海上船舶研究领域已出现相对较多的基于观测数据的实证研究,但在内河船舶研究领域,对船舶领域模型的研究大多还停留在理论和计算模型阶段,缺乏实证研究。对此,选择内河典型水域,采用AIS观测数据对内河船舶的领域特征进行研究,以得到领域尺寸与船舶尺寸之间的关系。
1 数据与算法
1.1 数据及研究区域的选取
研究水域为长江中游武汉段,西起武汉鹦鹉洲长江大桥水域,东至黄冈公铁两用长江大桥水域(见图1),全长44.92 n mile,通航船舶长度主要为60~120 m,包含武汉长江大桥、武汉长江二桥、武汉二七长江大桥、天兴洲长江大桥、武汉青山长江大桥和阳逻长江公路大桥等6处桥区,天兴洲水道、牧鹅洲水道、罗湖洲水道等3处弯曲航段,以及汉口港、青山港和阳逻港等多处港口及码头,航行环境特征丰富,为内河典型水域。

图1 长江中游武汉段水域
研究选用的AIS数据来自于长江海事局AIS数据中心,包含武汉段水域内2014年1月份超过1 000万条在航船舶AIS数据记录,该数据为时间序列数据,每时刻下都包含对应船舶的位置、航向、船首向、航速和船舶尺寸等信息,相对于雷达数据提供的船舶位置和航向信息显得更加丰富。由于AIS基站不能同时发送每艘船舶的数据信息,因此各艘船舶的信息之间存在一定的时差,且每艘船的AIS数据也可能包含有位置异常值和速度异常值,在应用前需对初始AIS数据进行插值和异常数据剔除。
1.2 算法原理
船舶领域的边界可由一艘船周围各方位上允许其他船舶靠近的最近距离来确定;该最近距离可通过选取目标船,以目标船在航行过程中距离目标船最近的他船的相对位置的分布情况来表示。为更清楚地反映目标船周围距其最近的他船的分布情况,将目标船每航行时刻下的周围水域网格化,并将他船按其尺寸看作是以其航向为长轴方向的矩形,然后判断该矩形所占的网格数,为所占网格计数为1,不为所占网格计数为0,其原理见图2。此外,将目标船每航行时刻下网格编号相同的网格计数叠加,以获得单船的网格密度图。由于一艘船舶在所选水域的航行时间有限,其单船网格密度图所反映的信息通常不够完整,因此按照目标船的长度对其进行分类,通过叠加同一长度类型目标船的单船网格密度图获得特定类型船舶的网格密度图,该网格密度图能比较完整地反映目标船周围距其最近的他船的航行分布情况,可用来对不同长度类型船舶的领域特征进行分析。该计算流程见图3。
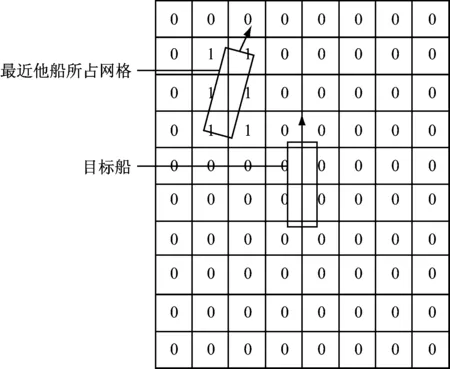
图2 单船网格计算原理
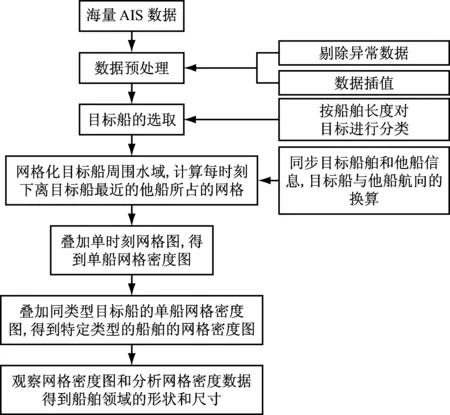
图3 算法流程
1.3 具体计算步骤
由于初始AIS数据中包含一些异常数据,因此需从所选的AIS数据中剔除船舶长度和宽度不符合实际情况、船舶位置异常(不在航行水域内)、速度异常及航向异常的数据信息。此外,AIS数据中的位置信息为AIS天线位置,并非船舶中心,因此需将该位置换算到船舶中心。另外,由于AIS基站不能同时发送每艘船舶的数据信息,使得目标船的航行信息与在其附近水域内的其他船舶的航行信息之间一定的时差,因此需采用数据插值的方法将其他船舶的位置推算至待研究的目标船发出AIS信息的时刻,以保证航行信息同步。利用处理好的AIS数据进行以下所需的网格密度图计算。
1.3.1单艘目标船的网格图
以目标船为正中心,以其艏向为纵轴方向,将其附近水域被等分为300×100个网格,为更加准确地记录目标船周围水域距其最近的他船的航行情况,划定每个网格的长度和宽度均为10 m,从位于该矩形水域的其他船舶中选出距离目标船最近的船舶的AIS数据,按船舶长度和宽度计算矩形,并判明该矩形所占的网格,可获得目标船各航行时刻的单船网格图。此外,为将目标船作为中心视角,保证目标船在各航行时刻下的艏向始终为网格图的纵轴方向,须解决由于目标船处于航行状态,使得其他船舶的相对方位一直在变的问题,从而对该矩形水域内的所有其他船舶的航向和目标船的航向进行换算,以保证所选统计样本的准确性。
1.3.2获取单船网格密度图
为更加准确地反映单艘目标船在航行过程中距离其最近的他船的航行情况,同时考虑到内河船舶实际航速的分布范围,将目标船在每航段内的航行信息插值到每2 s一个间隔。随着目标船航行时间的推移,可获得大量的单船网格图,累加这些网格图可获得单船的网格密度图。
1.3.3获取特定类型船舶的网格密度图
对目标船进行分类,对特定类型的目标船的单船网格密度图进行叠加,以获得比较完整的反映目标船周围距离其最近的他船的航行分布信息。本文只考虑船舶尺度对船舶领域的影响,因此根据内河水域船舶的长度分布,将目标船划分为60~69 m,70~79 m,80~89 m,90~99 m,100~109 m和110~119 m等6类,对每类船舶的网格密度图进行叠加,获得特定类型船舶的网格密度图,通过观测该密度图和分析该密度数据来得到各类船舶领域的形状和大小。
2 船舶领域统计结果分析
2.1 船舶领域统计结果
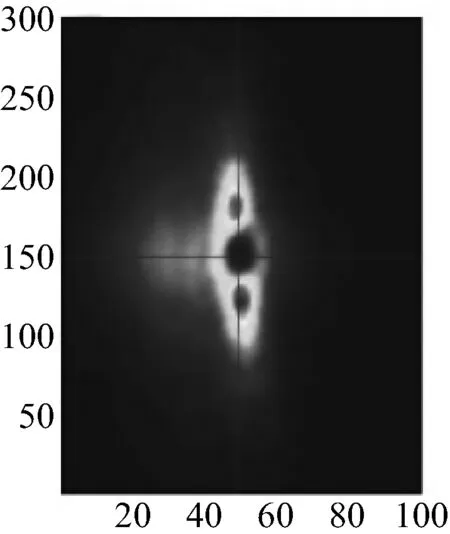
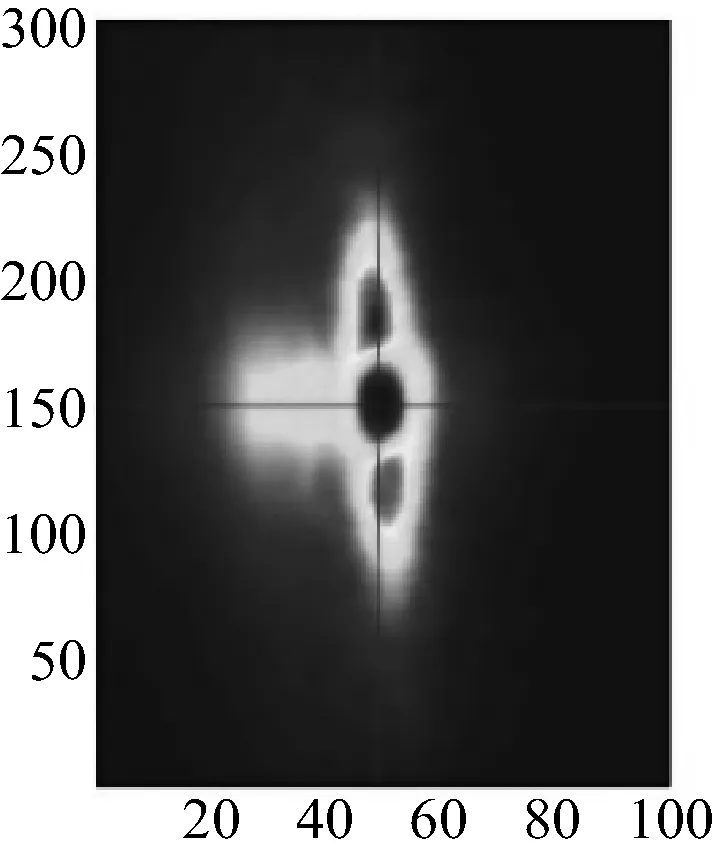
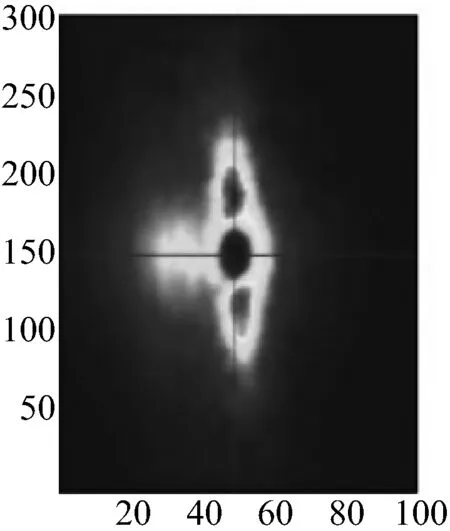
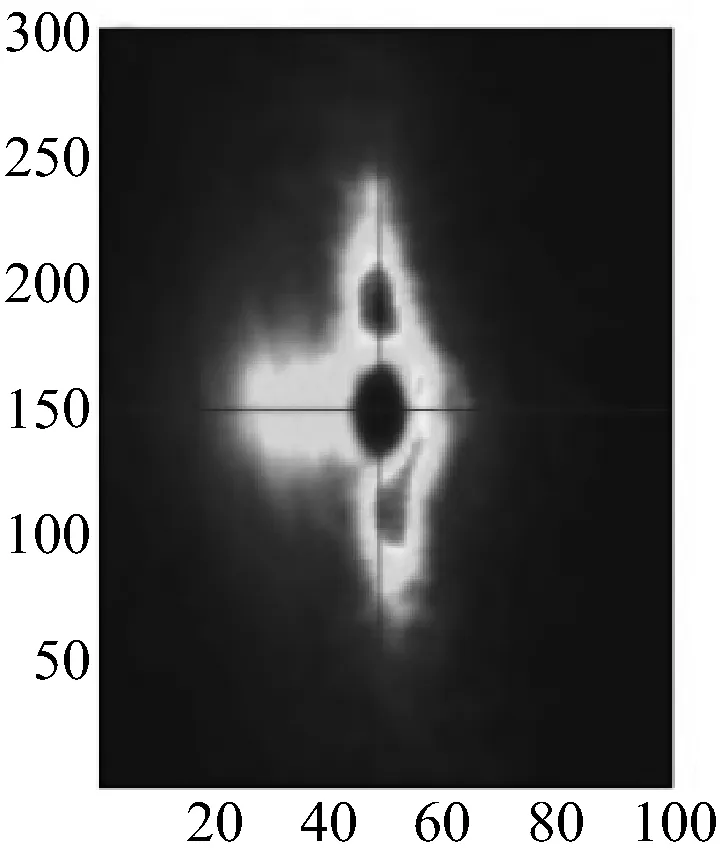
利用武汉段AIS数据获得超过4 000万张网格图,并将其按船舶长度进行分类和叠加,最终获得特定类型船舶的网格密度图,按密度大小填充颜色,可清晰地显示船舶领域的形状。6类船舶的船舶领域见图4,其中横轴和纵轴均表示网格数。
a) 60~69 m船舶的领域

b) 70~79 m船舶的领域
c) 80~89 m船舶的领域
d) 90~99 m船舶的领域

e) 100~109 m船舶的领域
f) 110~119 m船舶的领域
图4中,网格密度图中心(横轴50个网格,纵轴150个网格,即图中实线的交点)即目标船周围一小片水域,其网格密度远低于其他水域,可将该水域认为是船舶领域。
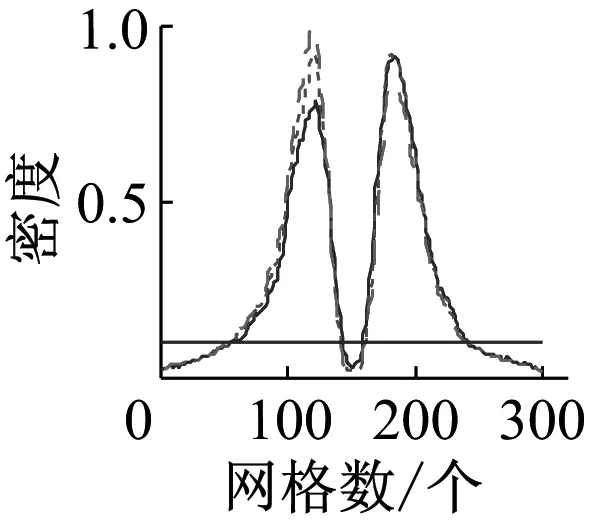
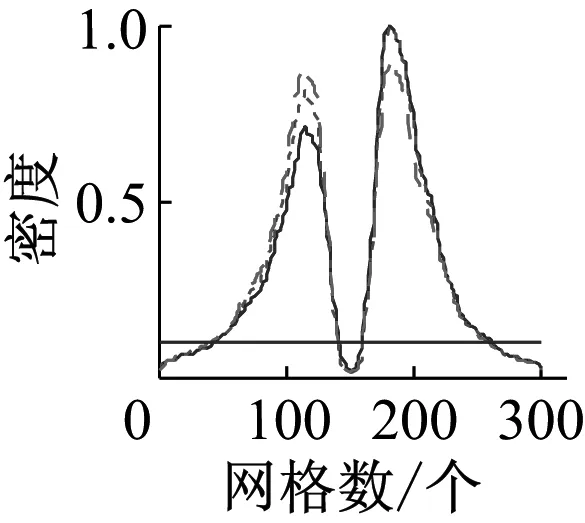
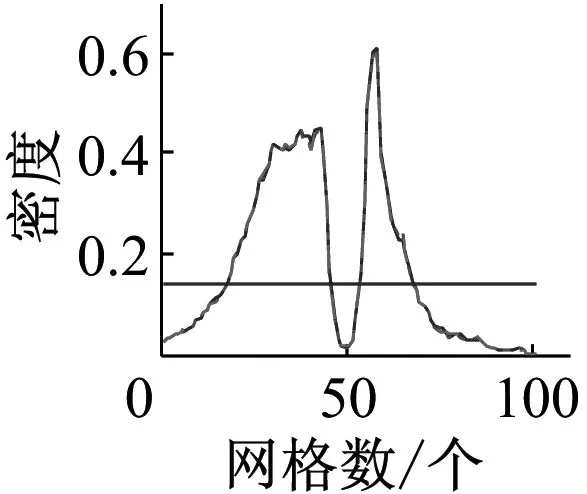
对网格密度图进行切割,得到各类船舶领域的大小[19],分别选取该网格密度图中心周围的长轴方向几列网格密度数据和短轴方向几行网格密度数据,生成的断面见图5。以密度最大值的20%为阈值来对该断面图进行切割,由该断面图可知:6类船舶领域长度分别占24个、25个、26个、28个、30个和32个网格,宽度分别占11个、13个、15个、17个、20个和22个网格;6类船舶本身长度分别占7个、8个、9个、10个、11个和12个网格,宽度分别占1.16个、1.28个、1.42个、1.58个、1.70个和1.91个网格。船舶领域长度与船长的比值分别为3.43,3.13,2.89,2.80,2.73和2.67;船舶领域宽度与船长的比值分别为1.55,1.63,1.69,1.74,1.78和1.81;船舶领域长度与船宽的比值分别为20.69,19.53,18.31,17.72,17.65和16.75;船舶领域宽度与船宽的比值分别为9.37,10.19,10.72,11.01,11.51和11.38。

a) 60~69 m船舶领域长轴断面
b) 70~79 m船舶领域长轴断面
c) 80~89 m船舶领域长轴断面

d) 90~99 m船舶领域长轴断面
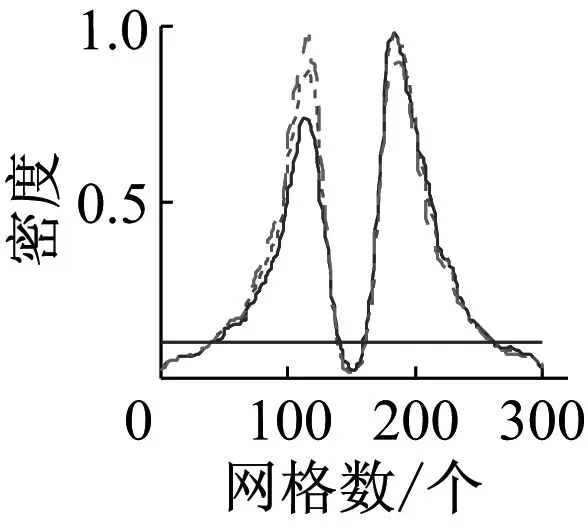
e) 100~109 m船舶领域长轴断面
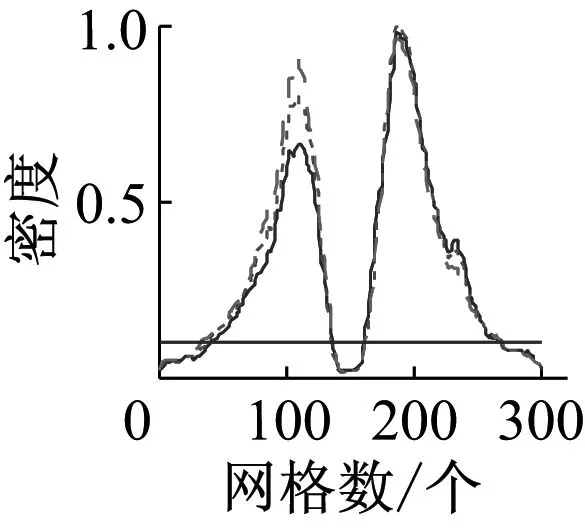
f) 110~119 m船舶领域长轴断面

g) 60~69 m船舶领域短轴断面
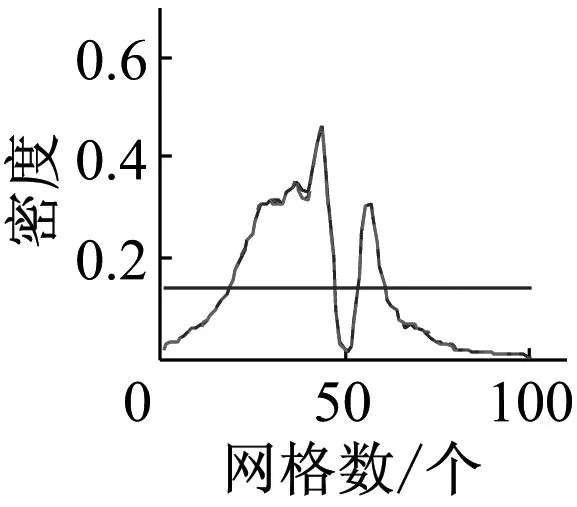
h) 70~79 m船舶领域短轴断面

i) 80~89 m船舶领域短轴断面
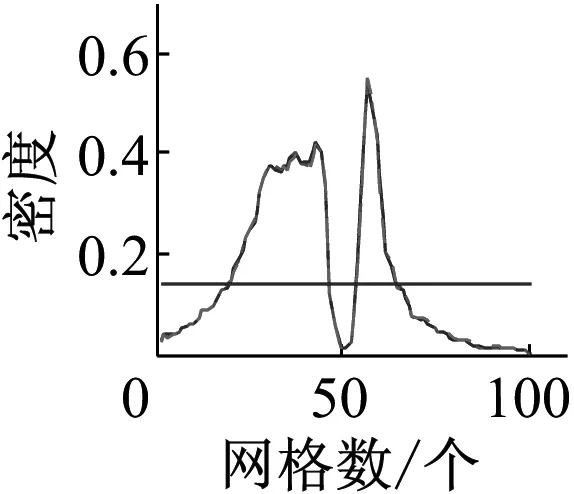
j) 90~99 m船舶领域短轴断面

k) 100~109 m船舶领域短轴断面
l) 110~119 m船舶领域短轴断面
图5 各类船舶的领域长轴及短轴断面
2.2 结果分析
由图4可知:所划分的6类船舶领域均呈非对称椭圆状,且椭圆长轴与艏向平行,领域尺寸与船舶尺寸的比值均有所变化。随着目标船舶尺度的增大,船舶领域尺度和领域右边的密度也逐渐增大,这表明船舶越大,其右舷船舶追越情况更加频繁,这也符合内河航行水域大船在占据主航道之后,他船多从其右舷追越的情况,这种船舶行为使得领域左右密度不对称,从而形成领域形状的非对称性;随着目标船舶尺度的增大,领域前后高密度区域逐渐变广,领域左边的密度逐渐增大,这表明船舶越大,其艏艉跟驰现象和左舷对遇情况更加明显,这种不同大小船舶的行为差异使得领域长度与船舶尺度的比值逐渐减小,领域宽度与船舶尺度的比值逐渐增加。因此,在内河典型水域,船舶领域的形状和尺度均与传统的基于理论分析的领域形状和尺度及海上自由航行水域船舶领域的形状和尺度有较大区别,领域的形状受船舶行为的影响明显。
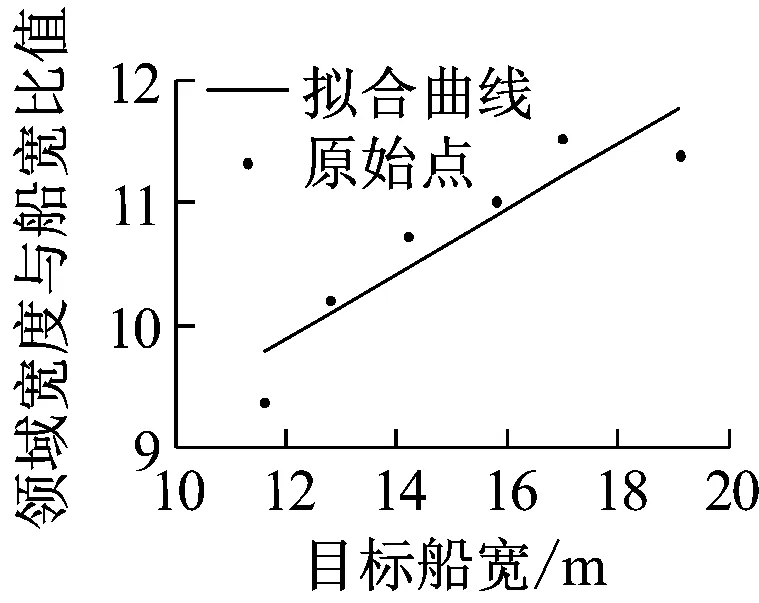
令目标船长为x1,目标船宽为x2,领域长度与船长的比值为y1,领域宽度与船长的比值为y2,领域长度与船宽的比值为y3,领域宽度与船宽的比值为y4(见图6),其相互之间的拟合关系为
(1)
由图5可知:领域长度和船长的比值在2.5~3.5,船舶越长,比值相对越小;领域宽度和船长的比值在1.5~1.9,船舶越长,比值相对越大;领域长度和船宽的比值在16~21,船舶越宽,比值相对越小;领域宽度和船宽的比值在9~12,船舶越宽,比值相对越大。
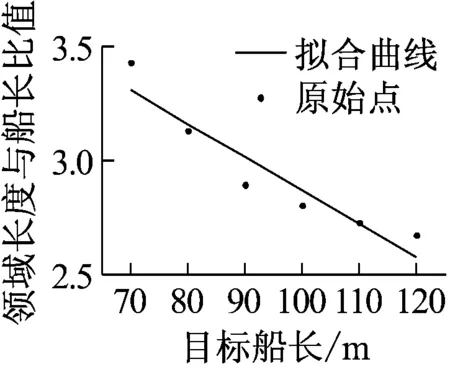
a) 船舶领域长度和船长的比值与船长的拟合关系
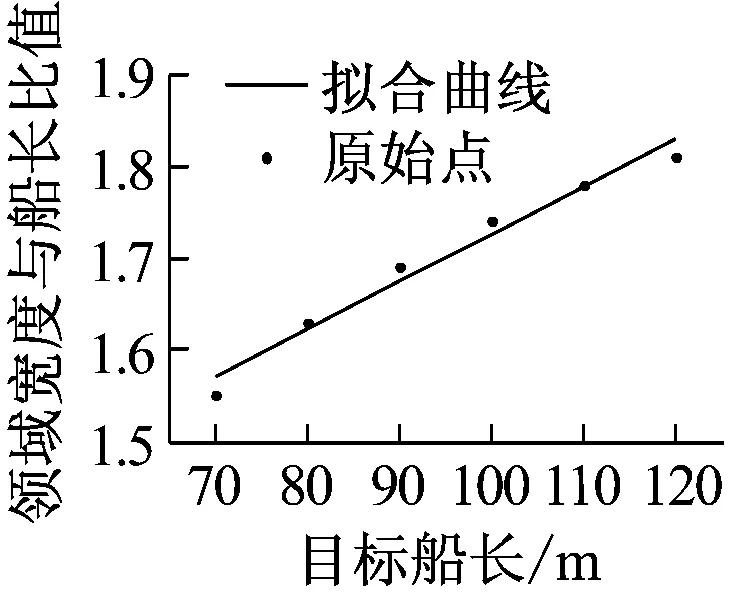
b) 船舶领域宽度和船长的比值与船长的拟合关系
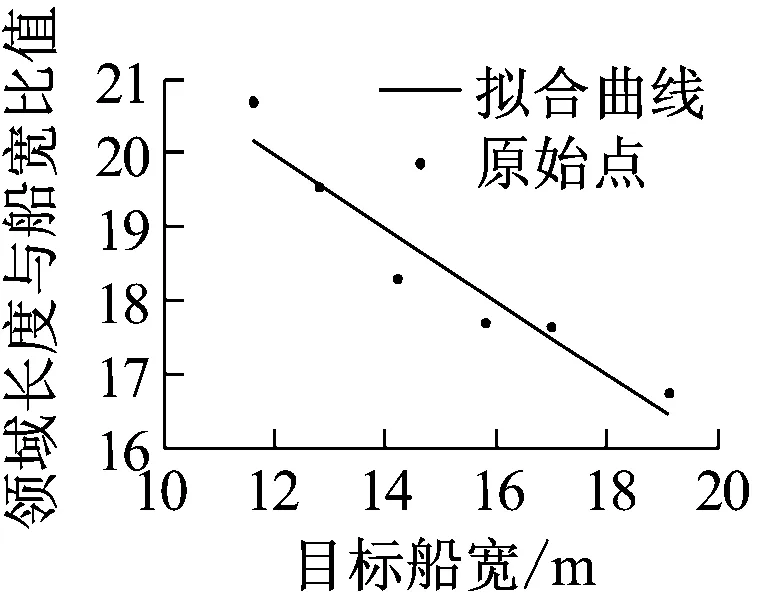
c) 船舶领域长度和船宽的比值与船宽的拟合关系
d) 船舶领域宽度和船宽的比值与船宽的拟合关系
图6 船舶领域长度、宽度与船长、船宽的拟合关系
3 结束语
本文提出利用船舶历史轨迹数据进行内河典型水域船舶领域特征研究的统计方法,并选取武汉段内的航行船舶的实际轨迹数据进行统计分析,通过获取的网格密度图和网格密度数据得到所划分的6类船舶的领域的形状、长度和宽度,结果表明:在内河典型水域,船舶领域的形状和尺度均与传统的基于理论分析的领域形状和尺度及海上自由航行水域船舶领域的形状和尺度有较大区别,领域尺度与船舶尺度的比值并非定值,领域的形状受船舶行为的影响明显,呈非对称椭圆状,且椭圆长轴与艏向平行。该船舶领域特征研究只考虑船舶尺度的影响,为获得更加准确的内河典型水域船舶领域模型,今后需考虑船舶速度、航行环境等更多因素对船舶领域的影响。
[1] FUJII Y, TANAKA K. Traffic Capacity[J]. Journal of Navigation, 1971, 24(4): 543-552.
[2] GOODWIN E M. A Statistical Study of Ship Domains[J]. Journal of Navigation, 1975, 28(3): 328-344.
[3] DAVIS P V, DOVE M J, STOCKEL C T. A Computer Simulation of Marine Traffic Using Domains and Arenas[J]. Journal of Navigation, 1980, 33(2): 215-222.
[4] DAVIS P V, DOVE M J, STOCKEL C T. A Computer Simulation of Multi-Ship Encounters[J]. Journal of Navigation, 1982, 35(2): 347-352.
[5] VAN DER TAK C, SPAANS J A. A Model for Calculating a Maritime Risk Criterion Number[J]. Journal of Navigation, 1977, 30(2): 287-295.
[6] COLDWELL T G. Marine Traffic Behaviour in Restricted Waters[J]. Journal of Navigation, 1983, 36(3): 430-444.
[7] KIJIMA K, FURUKAWA Y. Design of Automatic Collision Avoidance System Using Fuzzy Inference[C]//Proceeding of IFAC Conference on Control Applications in Marine Systems, 2001.
[8] KIJIMA K, FURUKAWA Y. Automatic Collision Avoidance System Using the Concept of Blocking Area[C]//Proceeding of IFAC Conference on Manoeuvring and Control of Marine Craft, 2003.
[9] WANG N. An Intelligent Spatial Collision Risk Based on the Quaternion Ship Domain[J]. Journal of Navigation, 2010, 63(4):733-749.
[10] PIETRZYKOWSKI Z. Ship’s Fuzzy Domain-a Criterion for Navigational Safety in Narrow Fairways[J]. Journal of Navigation, 2008, 61(3):499-514.
[11] 周丹,郑中义. 船舶领域与其影响因素的关系[J]. 大连海事大学学报,2016,42(3):25-30.
[12] 贾传荧. 拥挤水域内船舶领域的探讨[J]. 大连海运学院学报,1989,15(4): 15-19.
[13] 廖河树, 彭国均. 船舶在狭水道航行的碰撞危险性评价研究[J]. 中国航海, 2003 (1): 48-52.
[14] 徐周华,牟军敏,季永清. 内河水域船舶领域三维模型的研究[J]. 武汉理工大学学报(交通科学与工程版),2004,28(3): 380-383.
[15] 陈厚忠,郭国平. 内河并列桥梁桥区水域船舶领域模型与通过能力研究[J]. 船海工程,2008,37(5): 113-116.
[16] 范贤华,张庆年,周锋,等. 水流条件下内河船舶领域模型[J]. 大连海事大学学报,2013, 39(1): 46-48.
[17] 齐乐, 郑中义, 李国平. 互见中基于AIS数据的船舶领域[J]. 大连海事大学学报, 2011, 37(1):48-50.
[18] HANSEN M G, JENSEN T K, LEHN-SCHIØLER T, et al. Empirical Ship Domain Based on AIS Data[J]. Journal of Navigation, 2013, 66(6): 931-940.
[19] 向哲, 胡勤友, 施朝健, 等. 基于 AIS 数据的受限水域船舶领域计算方法[J]. 交通运输工程学报, 2015(5): 110-117.
CharacteristicsofShipDomaininTypicalInlandWaters
WENYuanqiao1,2,3,LITong1,ZHENGHaitao1,HUANGLiang1,2,ZHOUChunhui1,2,XIAOChangshi1,2
(1. School of Navigation, Wuhan University of Technology, Wuhan 430063, China; 2. Hubei Key Laboratory of Inland Shipping Technology, Wuhan 430063, China; 3. National Engineering Research Center for Water Transport Safety, Wuhan 430063, China)
In order to understand the characteristics of the ship domain in typical inland waters, the historical trajectory data of ships are studied, and the statistic model is constructed. Meshes are created in the vicinity of the target ship and the cells occupied by the closest ship at sampling time are recorded. In this way the diagram of ship number of each cell for single ship can be plotted. Overlying the diagrams of same type ships gives a diagram for ships of particular type. Looked into the resultant diagram, the shape and size of the ship domain can be determined. An interesting fact is seen in the investigation that the ship domain in real life is quite different from the theoretical prediction. The shape of the ship domain in typical inland waters takes the form of an asymmetrically shaped ellipse, with its major axis coinciding with the ship’s central line. The ratio of ship domain length to ship length is 2.5~3.5,and 16~21 to ship breadth; the ratio of ship domain width to ship length is 1.5~2.0 and 9~12 to ship breadth.
ship domain; typical inland waters; historical trajectory data; density-in-cell diagram
2017-11-24
国家自然科学基金(51579204; 51679180;51709218);武汉理工大学国家级大学生创新创业训练计划资助(20171049712005)
文元桥(1975—),男,湖北松滋人,教授,博士生导师,博士,研究方向为水上交通安全与环境。E-mail:3444324@qq.com
1000-4653(2018)01-0043-05
U675
A
