软件接收机中时钟偏差的影响与修正
2018-05-04余成江文豪孙睿英
余成江,文豪,孙睿英
(1.重庆市勘测院,重庆 401121; 2.黑龙江第二测绘工程院,黑龙江 哈尔滨 150081)
1 引 言
GPS软件接收机这一概念被提出约二十年,由于其灵活性以及多模多频的可重配置等特点,目前主要被应用于GPS接收机的算法开发、测试以及与其他传感器的组合等。GPS软件接收机在硬件上只需天线和射频前端,中频数据处理全部在通用芯片中实现,算法实现和更改更加灵活。故其可轻易摆脱传统接收机结构的束缚,在实现方式和算法实现方面更加的多样化,为解决目前GPS应用中的实际问题提供了更多的可能性。而目前关于软件接收机的研究多集中于导航领域,其原因是目前的软件接收机实现多为伪距,故在测量精度等方面尚不能满足工程测量等精密行业的应用。而GPS在工程测量方面的应用由于一些环境限制也还有许多问题待解决,目前在工程测量领域,高精度的商用接收机价格昂贵,不适于大范围的铺设,且对于多模多制式的卫星全球定位系统新环境适应能力有限。故提高软件接收机的测量精度,并分析各种误差所带来的影响,为软件接收机解决工程测量领域的实际问题和应用提供了理论支持和技术基础。
在软件接收机二十年的发展中,前十年由于受到硬件条件的限制,研究大都集中在软件接收机的多通道、实时性实现。近十年的研究主要集中在软件接收机对多模多系统的支持,见文献[1],以及和惯导等系统的耦合应用。而对于载波相位观测值的输出和精度评定研究很少,从而限制了软件接收机在精密工程等领域的应用。故软件接收机的提出者AKOS在10年的文献[4]中针对这一现象详述了伪距观测值和载波相位观测值在软件接收机中的实现过程,并分析了时钟对观测值的影响。寇艳红[5]等在13年对于时钟对采样频率和下变频频率的影响进行了分析。但是上述文章采用的射频前端中频采样率都比较高,中频数据量和运算量都比较大。这在一定程度上限制了软件接收机的数据存储容量和数据传输,从而对软件接收机在工程测量中的实际应用产生影响。
故在压缩数据量的情况下保证软件接收机的测量精度显得尤为重要。故本文在文献[5]的基础上,根据射频前端的工作方式,分析了由晶振不稳对软件接收机平台所造成的影响,并根据其工作机制进行了补偿修正、比较了修正前后该平台的工作性能。经试验验证,经过时钟补偿修正过后的软件接收机在低采样率的情况下性能提高更加明显,精度可达到厘米级,能满足部分工程测量的需求。故该软件接收机应用于工程测量便具有采样率较低,成本低,数据量相对较小,运算速度快等优点。
2 软件接收机工作机制
软件接收机由天线、射频前端和中频数据处理模块三部分组成。天线接收GPS信号并将无线电信号转化为射频模拟信号。射频前端将射频模拟信号下变频并数字化采样为数字中频信号。中频数据处理模块完成接收信号的捕获、跟踪以及观测值的输出和定位。
接收到的信号频率fR为信号发射频率fRF加上由多普勒引起的频率偏移fD。
fR=fRF+fD
(1)
理想的软件接收机是天线后直接数字化,接数据处理模块,但是由于GNSS系统的射频信号一般在GHz数量级,而根据奈奎斯特采样定律,模数转换器(ADC)采样速率需大于信号最高频率的两倍,当前商用ADC无法满足要求。故在模数转换器前加入混频器将接收到射频信号的频率fR降为中频。
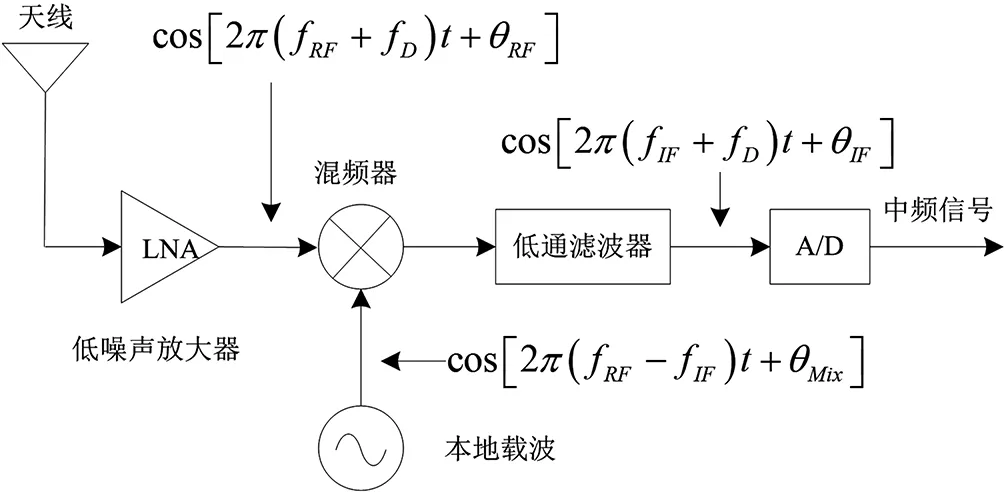
图1 射频前端工作机制
射频前端晶振通过倍频分别为下变频操作中的混频电路提供固定频率的本地载波(如图1所示),还为模数转换器的采样频率提供基准。其中本地晶振频率为foc,采样频率为fs。
fdown=n1×foc
fs=n2×foc
(2)
标称中频fIF=fRF-fdown,中频信号频率fdata=fIF+fD。
数字中频信号可以表示为:
sdata(t)=cos[2π(fIF+fD)t+θIF]
(3)
3 载波相位观测值输出
多普勒现象是由于卫星与接收机天线之间的相对运动产生的。故多普勒频移fD与距离变化之间的关系为:
fD=-ρ/λ
(4)
ρ为距离变化,λ为卫星发射信号波长。
当接收机稳定跟踪信号之后,数字中频信号中的信号频率fdata可通过锁相环PLL持续输出。由式(4)可以得到载波相位观测值的计算公式:

(5)
φ1为t1时的载波相位观测值,φ2为t2时的载波相位观测值。由式(5)可以看出载波相位观测值是通过积分多普勒得到。且考虑到信号在大气中的传播和卫星钟差、接收机钟差等因素,ti时刻的载波相位观测值φi与该时刻卫星与接收机的距离ρi之间的关系可表示为:
φi=λ-1[ρi+Ii+Ti+c×(δtu-δts)]+N+εi
(6)
Ii、Ti为该时刻由电离层和对流层引起的延迟误差,δtu、δts为接收机钟差和卫星钟差,N为整周模糊度,εi为其他噪声误差。通过式(5)输出载波相位观测值,再根据星历文件计算卫星位置,再通过差分定位便可以得到接收机天线位置处的精确位置。
4 时钟偏差的影响和修正
由式(5)可知,载波相位观测值根据积分多普勒计算得出,而多普勒频率fD由锁相环PLL输出的数字中频信号载波频率fdata与标称中频fIF相减得到。
当时钟产生漂移时,本地生成的载波频率和采样频率等都会产生偏差。设晶振的漂移速度为tu,则真实的中频频率和采样频率为:
fIF_act=fRF-fdown(1+tu)
fs_act=fs(1+tu)
(7)
故射频前端晶振foc不准确会使得得到的数字中频信号的中频与标称中频之间存在一定的偏差fbias。而真实的多普勒频移为:
fD_act=fD-fbias
其中多普勒频率的偏差:
fbias=fD-fD_act

=-fdatatu-fdowntu
=-(fRF+fD)tu
≈-fRFtu
(8)
当tu的数值为 0.1 ppm(即1e-7),接收GPS系统L1频率的信号时,由晶振引起的多普勒频移偏差fbias约为150赫兹。对于低速率的接收机来说,多普勒频移主要是由于卫星运动所产生,根据GPS星座的分布和运行,可以得到地表上的接收机接收到的GPS信号多普勒频移变化范围为正负六千赫兹。故由晶振输出频率的偏差带来的多普勒频移偏差不能忽视。一般认为式(6)中的整周模糊度N在稳定跟踪过程中是不变的,则由多普勒频移偏差带来的积分多普勒偏差也会导致载波相位观测值与伪距观测值不一致。
故式(5)在多普勒频移产生偏差的情况下,载波相位观测值需要进行补偿和修正。将式(8)带入得到:

(9)
其中fRF根据接收机接收的卫星信号频率得到,tu的根据最小二乘方法来计算。
5 时钟频率修正对观测值的影响
如图2所示为两颗卫星的伪距和载波相位观测值,下图为相应的未修正时钟时输出的伪距观测值变化(伪距率,绿色)和载波相位观测值变化(多普勒,蓝色)与修正过后的多普勒(红色)。由下图可见载波相位观测值变化(多普勒,蓝色)曲线相对于伪距率(绿色线)更加平滑,抖动更小。但是由于测得的多普勒频移fD与真实的多普勒频移fD_act有偏差fbias,故积分多普勒有明显的偏差。图中用最小二乘计算tu出后载波相位观测值变化与伪距观测值变化两条曲线重合。可以看出在对时钟频率修正过后,载波相位观测值与伪距的一致性得到了提高。由多普勒频移偏差引起的载波相位观测值偏移得到了改正。

图2修正前后的伪距与载波相位观测值一致性
6 时钟频率修正对差分定位结果的影响
如图3中左图所示为修正前的差分定位结果,轨迹图东西方向跨度 14 cm,标准差为 4.3 cm。南北方向跨度 4 cm,标准差 1.4 cm。而修正过后的轨迹图较之前定位精度得到了显著的提高,东西跨度 5 cm,标准差 1.4 cm,南北跨度 2 cm,标准差 0.4 cm。
图3修正前后的差分定位结果轨迹图和NEU三方向偏差
7 结 论
根据时钟频率修正前后的结果可以看出,射频前端晶振对多普勒频率的提取和载波相位观测值的生成有着较明显的影响,对晶振频率进行修正能够显著提高伪距观测值和载波相位观测值的一致性,并且使得差分定位的结果得到了显著提高。晶振在射频前端中同时作为混频器和模数转换器的时钟基准,故可以根据伪距观测值来计算时钟的偏移,从而来改正多普勒频移,从而输出精确的多普勒观测值和载波相位观测值。由于载波相位观测值的定位精度远高于伪距的定位结果、配合精确的速度信息,可以更加灵活地运用在精密工程测量领域。
[1] 谢刚. GPS原理与接收机设计[M]. 电子工业出版社,2009.
[2] 张提升,郑建生,章红平等. GNSS接收机晶振参数对载波相位测量的影响分析[J]. 武汉大学学报·信息科学版,2012,37(12):1413~1416.
[3] 郑彬,吴舜晓,刘增军等. 接收机载波初始相位偏差变化特性分析[J]. 大地测量与地球动力学,2012,32(4):139~143.
[4] XiaoFan Li,D. Akos. Implementation and performance of clock steering in a software GPS L1 single frequency receiver[C]. Navigation,Journal of the Institute of Navigation,2010,57(1):69~85.
[5] Kou Yanhong,Morton Yu. Oscillator frequency offset impact on software GPS receivers and correction algorithms[J]. IEEE Transactions on Aerospace and Electronic Systems,2013,49(4):2158~2178.
[6] D. Akos,A Software Radio Approach to Global Navigation Satellite System Receiver Design[D]. Ohio University,Athens,OH,1997.