超声电机在真空高低温环境下的驱动性能*
2018-05-04樊俊峰司永顺孙腾飞尚爱华
罗 婕, 樊俊峰, 司永顺, 孙腾飞, 尚爱华
(北京空间飞行器总体设计部机械系统事业部 北京,100094)
1 问题的引出
超声电机(ultrasonic motor,简称USM)是近30年来发展起来的一种新概念动力装置,它打破了由电磁效应获得转速和转矩的电机概念,是处于当前学科前沿的高新技术之一。与传统的电磁电机相比,超声电机具有低速大扭矩、响应快、定位精度高、结构简单、断电自锁力大以及不受磁场干扰等诸多显著的优点[1-5],因此在航空航天领域有着广阔的应用前景,尤其适用于对磁洁净度要求很高的卫星上。其中,行波型旋转超声电机由于研究的较多,且运行稳定性和可靠性较高,因此与其他类型的超声电机相比,应用更为广泛,是实用化的首选电机[1]。为了更好地掌握电机的特性,并在工程应用中充分发挥其作用,需要对超声电机的驱动性能进行研究,从而得到电机在不同的激发频率下,其转速和扭矩之间的对应关系,尤其对于超声电机在卫星上的应用而言,研究其在真空高低温环境下的驱动性能至关重要。在美国和日本,许多研究者率先开展了超声电机在非常态和真空环境下的驱动性能研究以及相关的探索性工作,但基本只有试验结论的报道,许多关键数据并未公开[6-7]。在国内,一些研究所和高校在超声电机研制方面也有着多年的技术积累和相关经验,但更多偏重于民用领域,对于电机在真空高低温环境下的特性研究以及在航天领域的应用研究依然十分有限[8-10]。为了能够将超声电机更好地应用到航天器上,满足国防和航天技术的发展需求,还有很多的研究工作亟待开展。
笔者主要针对行波型旋转超声电机在电磁监测试验卫星的卷筒式伸展机构上的应用来展开相关研究,获得电机在真空高低温环境下的驱动性能测试数据,并和常温常压环境下的数据进行比对,从而为电机的优化设计和推广应用提供重要的试验依据。电磁监测试验卫星是我国首颗面向地震研究及应用、用于监测全球空间电磁场、电磁波、电离层等离子、高能粒子沉降等物理量的空间试验卫星,星上配置有高精度电场探测仪。卷筒式伸杆机构是将电场探测仪伸展到距星体一定距离的指定位置,并使其满足测试条件的关键产品,它的核心部件是由一种高弹性合金材料所制成的弹性卷筒,如图 1所示。初始时,弹性卷筒处于收拢状态,并置于储藏罐中,当开始伸展时,它依靠自身弹性实现自驱动,并伸展形成具有一定刚度的薄壁管,从而实现支撑功能,其伸展总长度约为4.5 m。

图1 弹性卷筒结构图Fig.1 Elastic coiling block structure
弹性卷筒在储藏罐中处于收拢状态时,其长度不足0.5 m,因此在压缩过程中储存了较大的弹性能量。在伸展过程中,如果不加以控制,它会依靠自身的储能快速地弹射出去,这会产生很大的冲击,很有可能造成卷筒撕裂或结构变形,大大降低产品的精度。为了解决这一问题,必须控制弹性卷筒的伸展速度。现在拟采用行波型旋转超声电机来实现速度控制,通过一个电缆绕筒组件将超声电机与弹性卷筒上的控制电缆相连接,在弹性卷筒展开时,通过调节超声电机的激发频率来控制其转动速度,从而间接控制弹性卷筒的伸展速度。
一般来说,超声电机是作为驱动源使用的,因此在研究超声电机的驱动性能时,多数情况下对其施加的是反向负载,即负载扭矩方向与超声电机的旋转方向相反。而在卷筒式伸展机构上,超声电机是作为弹性卷筒的负载来使用的,其目的是对弹性卷筒伸展起到拖拽和阻缓的作用。对超声电机来讲,弹性卷筒为其施加了一个同向负载,即负载扭矩方向与超声电机的旋转方向相同,目前国内尚未见到有关同向负载方面研究。因此,开展超声电机在同向负载下的驱动性能研究及真空高低温环境对其产生的影响,这对于优化超声电机设计、保证卷筒式伸杆机构安全可靠地实现展开功能以及促进超声电机在航天领域的推广应用都有着十分重要的意义。
2 测试原理及系统设计
2.1 常温常压环境下的测试系统设计
由于弹性卷筒在伸展过程中,控制电缆给超声电机施加的力矩在0~0.7 N·m范围内,因此需要研究行波型旋转超声电机在较小的同向负载下,其转速和负载扭矩之间的对应关系。根据测试要求,设计并搭建了一套测试系统来进行超声电机驱动性能的研究(常温常压环境),其原理如图2所示。该测试系统由超声电机及控制器、高精度扭矩传感器及显示仪表、直流力矩电机及控制器、弹性联轴器以及安装底座等组成,其中直流力矩电机的作用便是模拟同向负载,给超声电机施加一个与其旋转方向相同的扭矩,并通过高精度扭矩传感器来测出施加的扭矩值大小。需要提及的是,在选择直流力矩电机的输出力矩指标范围时,需要考虑到给超声电机施加力矩的范围(0~0.7 N·m),为了保证精度,直流力矩电机输出力矩指标范围不能选得太大。根据实际需求,最终选择了输出力矩范围为0~5 N·m的直流力矩电机。

图2 超声电机驱动性能测试原理(常温常压环境)Fig.2 Driving performance testing principle of ultrasonic motor(under normal temperature and normal pressure environment)
测试过程说明:当超声电机控制器以某一固定的频率激发超声电机时,超声电机的输出轴将以一定的转速开始旋转,此时启动直流力矩电机,使其以相同的旋转方向和超声电机一起旋转。调节直流力矩电机控制器上的速度旋钮,可以控制直流力矩电机的转速,当直流力矩电机的转速和超声电机的初始转速相同时,此时扭矩传感器的读数为零,也就是说,此时施加到超声电机上的负载扭矩为零,当逐渐增大直流力矩电机的转速时(旋转方向不变),此时可以观察到扭矩传感器的读数也会逐渐增大,说明此时施加给超声电机的是同向负载,且负载扭矩值可以通过调节直流力矩电机来进行改变。需要说明的是,由于直流力矩电机和超声电机是通过联轴器连接在一起的,因此它们的转速是相同的。通过扭矩传感器进行读数,使扭矩值从0逐渐增加到0.7 N·m,变化步长为0.1 N·m,在每个扭矩值下,通过直流力矩电机控制器上的速度显示窗口可以获得此时直流力矩电机的转速值,该值即为超声电机的转速值,由此便可以得到超声电机在较小的同向负载下(0~0.7 N·m)负载扭矩和转速之间的对应关系曲线,该曲线反映了超声电机的驱动性能。
2.2 真空高低温环境下的测试系统设计
在真空罐内进行电机类产品的驱动性能测试时,传统的方法是通过磁流体进行密封和传动,将罐内的电机与罐外的设备进行轴向连接。但是磁流体对扭矩的传输有一定的衰减作用,由于研究的是超声电机在较小同向负载下的驱动性能,负载扭矩范围为0~0.7 N·m,若仍采用磁流体传动的方式,会给测试结果带来较大的误差,难以控制测量精度。有相关单位曾采用这种方法对超声电机在较小负载下的驱动性能进行测试,结果由于磁流体对扭矩的衰减影响了测试结果,从而导致测试方法失败。因此,为了避免出现这样的问题,笔者在进行测试系统设计时,将高精度扭矩传感器和直流力矩电机连同超声电机一起放在真空罐内,此时通过罐外的显示仪表读出扭矩传感器的数值,即为超声电机负载扭矩的真实值,这样便避免了因扭矩衰减而产生的测量误差。
不过,超声电机在进行真空高低温试验时,要求温度变化范围为-40~+50 ℃,此时必须考虑到罐内测试设备对温度变化的承受能力。根据设备的标称使用温度,直流力矩电机可承受的工作温度范围为-55~+60 ℃,而高精度扭矩传感器可承受的工作温度范围仅为-30~+30 ℃,因此为了保证扭矩传感器的读数准确,测试精度不会下降,需要对扭矩传感器采用控温措施,使其在真空罐内的工作温度始终维持在-30~+30 ℃范围内。
图3所示为超声电机在真空罐内进行同向负载下驱动性能测试的原理图。将超声电机和高精度扭矩传感器之间的连接轴适当加长,并采用导热性差的钛轴,从而减小超声电机本身的温度变化对扭矩传感器温度的影响。在试验过程中,超声电机放置在红外加热笼内,靠红外加热笼加热和热沉液氮制冷的方式来达到其所需的高低温工况;而直流力矩电机和高精度扭矩传感器放置在温控盒内,通过调整温控盒的温度,来控制测试设备(主要是高精度扭矩传感器)始终工作在-30~+30 ℃范围内,从而保证测试精度。测试时的实物图照片如图4所示,测试过程和3.1节中常温常压环境下的测试过程是一样的。
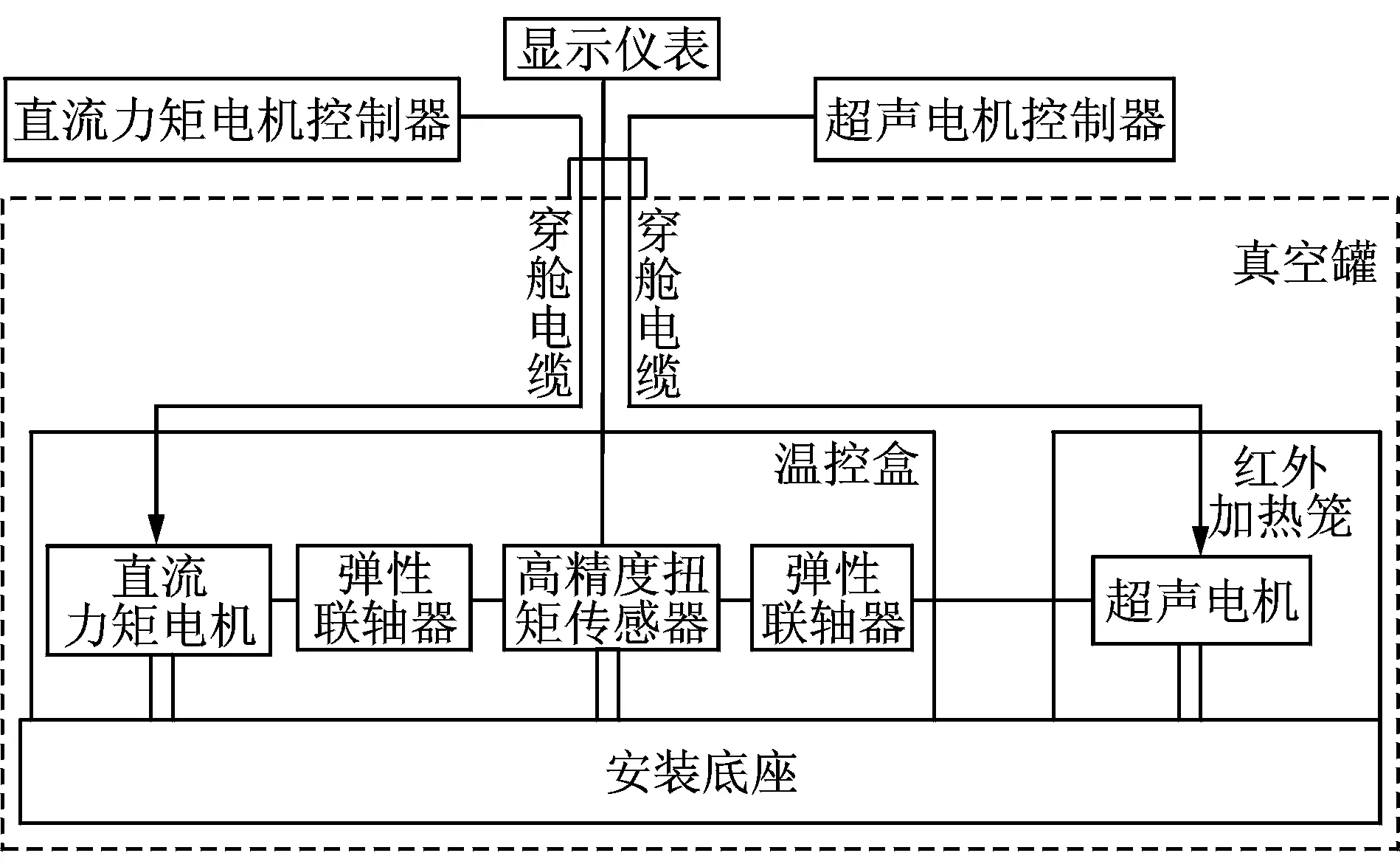
图3 超声电机驱动性能测试原理(真空高低温环境下)Fig.3 Driving performance testing principle of ultrasonic motor(under vacuum and high-low temperature environment)
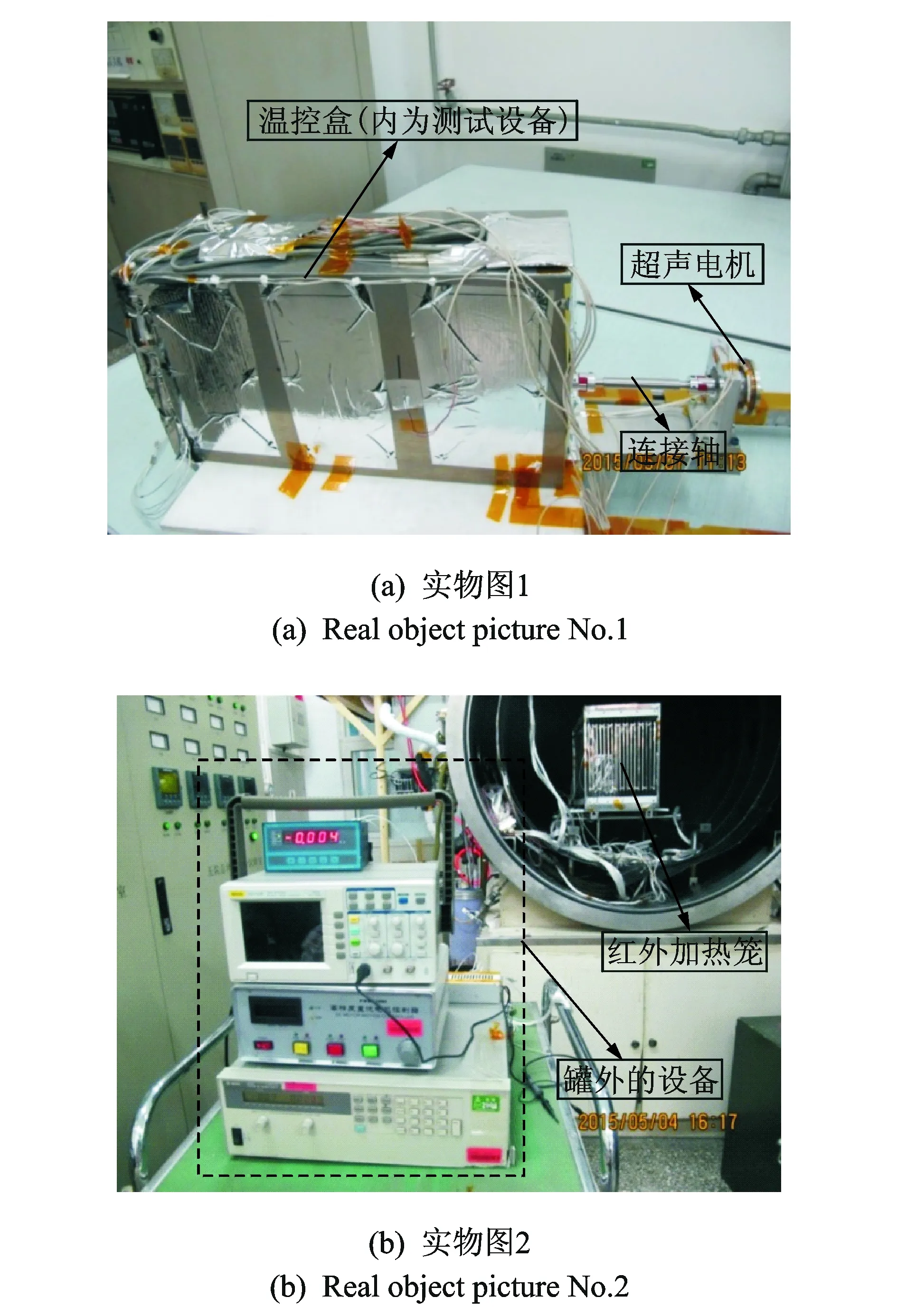
图4 驱动性能测试系统实物图(真空高低温环境下)Fig.4 Real objects of driving performance testing system(under vacuum and high-low temperature environment)
3 试验验证
超声电机在真空罐内进行真空高低温试验的条件如下:
1) 环境压力≤6.65×10-3Pa;
2) 试验温度-40~+50 ℃;
3) 循环次数3.5次;
4) 温度平均变化速率≥1 ℃/min;
5) 停留时间高温停1.5 h,低温停1.0 h。
3.1 扭矩传感器控温测试结果
试验时,在高精度扭矩传感器表面粘贴了热电偶,用于监测在高低温循环过程中,扭矩传感器表面的温度变化,变化曲线如图 5所示。可以看到,通过采取合理的控温措施,可以将高精度扭矩传感器的工作温度控制在-30~+30 ℃范围内,保证其测试精度,从而获得有效的测试结果。

图5 高精度扭矩传感器的控温测试结果Fig.5 The temperature control testing result of high precision torque transducer
3.2 在同向负载下的驱动性能测试结果及对比分析
超声电机在对弹性卷筒的伸展过程进行控速时,主要使用的是B09模态,因此本试验主要针对超声电机在B09模态下的驱动性能展开研究。
通过激光测振系统测出超声电机定子的B09模态所对应的峰值频率一般在39.5~40 kHz范围内。从理论上讲,为了在定子中激发出B09模态,提供给超声电机的激励电压频率应为B09模态所对应的峰值频率。但是在实际情况中,由于定子在峰值频率处的振幅太大,很容易造成陶瓷片断裂,因此根据经验,在超声电机实际工作时所提供给它的激励电压频率一般在40.5~43.0 kHz之间,这样既可以激发出较纯的B09模态,又不会出现陶瓷片因振幅过大而断裂的情况。
图 6~图 8所示是60型超声电机在3个激发频率值下(42.3,41.5,40.8 kHz),分别在常温常压环境下和真空高低温环境下,所测得的转速-扭矩曲线,其中横轴代表同向负载扭矩值(0~0.7 N·m,变化步长为0.1 N·m),纵轴代表超声电机在不同扭矩值下所对应的转速值。需要说明的是,在进行真空高低温试验过程中,只在高温工况+50℃和低温工况-40℃时对超声电机通电并完成驱动性能测试,在升温和降温的过程中超声电机不工作。

图6 超声电机的转速-扭矩曲线(激发频率42.3 kHz)Fig.6 Speed-torque curves of ultrasonic motor (excitation frequency: 42.3 kHz)
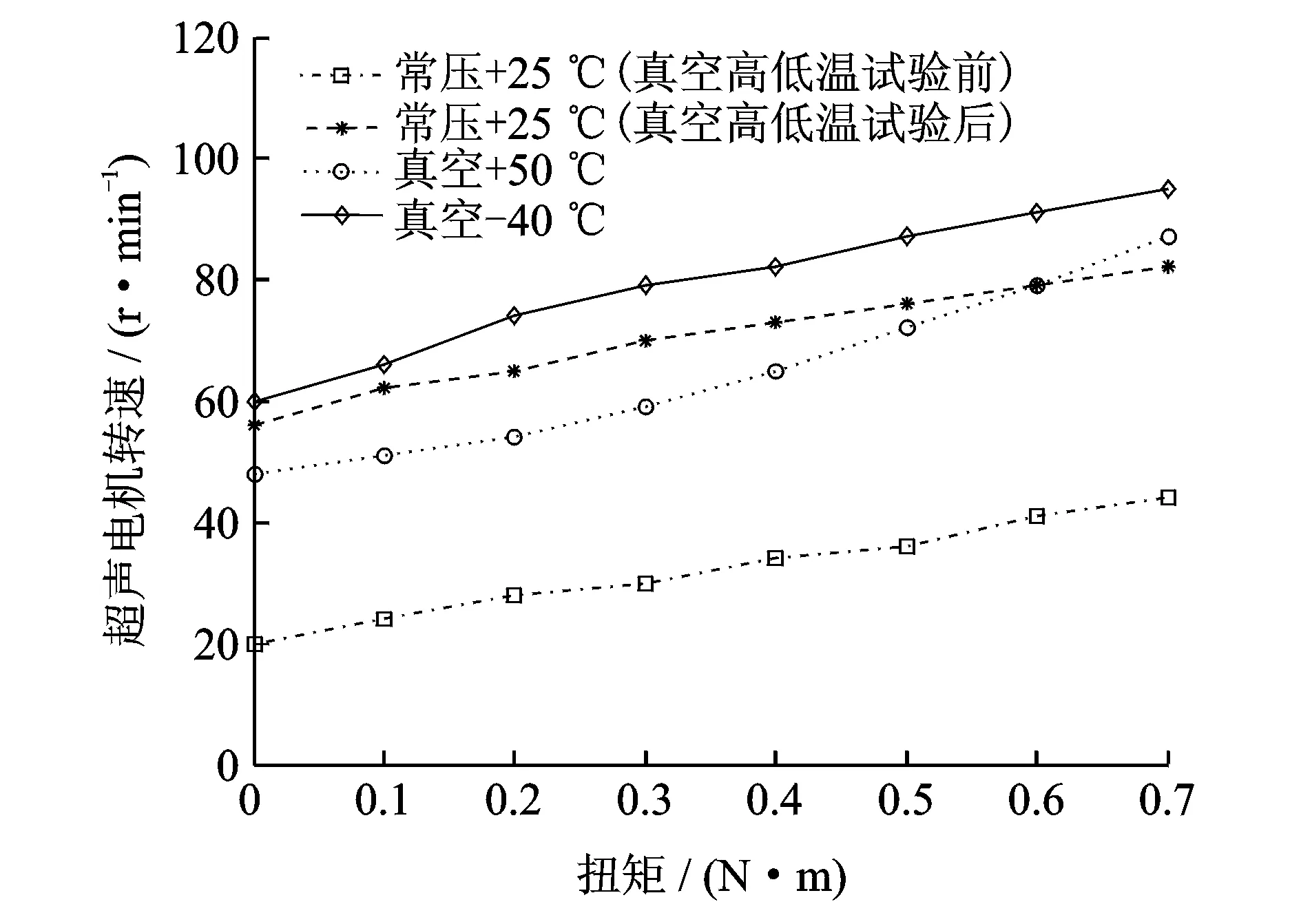
图7 超声电机的转速-扭矩曲线(激发频率41.5 kHz)Fig.7 Speed-torque curves of ultrasonic motor (excitation frequency: 41.5 kHz)
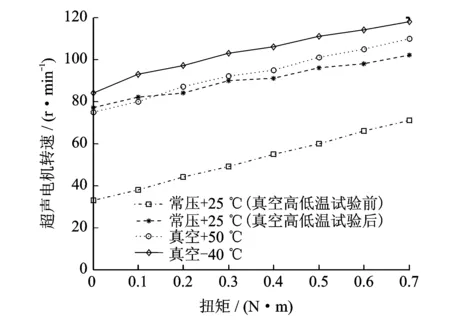
图8 超声电机的转速-扭矩曲线(激发频率40.8 kHz)Fig.8 Speed-torque curves of ultrasonic motor (excitation frequency:40.8 kHz)
通过对图6~图8的驱动性能曲线(即转速-扭矩曲线)分析和对比,可以总结出以下规律。
1) 无论在常温常压环境下,还是在真空高低温环境下,随着同向负载的扭矩值逐渐增大,超声电机的转速值也是逐渐增大的,而且基本呈线性增长。
2) 在相同环境条件下和相同负载扭矩下,激励电压的频率越低(不低于B09模态的峰值频率),超声电机的转速就越高:例如在常压+25℃时(高低温试验前),电机在42.3,41.5和40.8 kHz的激发频率下,所对应的空载转速(即同向负载为零时)分别为10,20和33 r/min,这和超声电机定子的模态特性是一致的。因为激发频率越低,就越接近于B09模态的峰值频率,则定子的振幅就越大,它靠摩擦力推动转子旋转的速度就越快,因此输出轴的转速就越大。
3) 无论在真空高温+50 ℃时还是真空低温-40 ℃时,超声电机在相同负载扭矩下的转速相对于常压+25 ℃时(高低温试验前)的转速都有了较大幅度的提高,而且低温时的转速基本都略高于高温时的转速。
4) 当超声电机经历了3.5个真空高低温循环之后,再回到常压+25 ℃时,电机在相同负载扭矩下的转速比高低温试验前有了较大幅度的增长,说明真空高低温环境对超声电机的驱动性能影响较大。
4 结束语
笔者通过设计并搭建了一套测试系统,完成了行波型旋转超声电机在承受较小的同向负载时(0~0.7 N·m),在真空高低温环境下的驱动性能研究,获得了有效测试数据,并通过将其和常温常压下的测试数据进行对比分析,得到了一些有用的结论。试验结果表明,超声电机在真空高低温环境下可以有效地工作,并且在激发频率不变时,随着同向负载扭矩的增加,电机转速基本呈线性增长,而且转速相对于常温常压下的转速有了较大提高。通过对比真空高低温试验前后的测试数据可以发现,真空高低温环境确实使超声电机的驱动性能发生了较大变化,电机转速有了大幅度增长。研究者可以通过这些曲线选择合适的激发频率,将超声电机的转速限定在合适范围内,从而实现在真空高低温环境下对弹性卷筒伸展过程的控速。
[1] 王光庆. 行波型超声电机的若干关键问题研究[D]. 杭州:浙江大学,2006.
[2] 赵淳生. 超声电机技术与应用[M]. 北京: 科学出版社, 2007:85-89.
[3] 赵淳生. 面向21世纪的超声电机技术[J]. 中国工程学报, 2002,4(2):86-91.
Zhao Chunsheng. Ultrasonic motor techniques for 21st century[J]. Journal of Engineering Science, 2002,4(2):86-91. (in Chinese)
[4] 赵淳生. 超声电机技术的发展、应用和未来[J]. 电气时代,2001(3):1-3.
Zhao Chunsheng. Development, application and future of ultrasonic motor techniques[J]. Journal of Electric Age, 2001(3):1-3. (in Chinese)
[5] Uchino K. Piezoelectric ultrasonic motor: overview[J]. Smart Material Structures, 1998,7(3):273-285.
[6] Morita T,Niino T,Asama H.Rotational feedthrough using ultrasonic motor for high vacuum condition[J].Vacuum,2002,65(1):85-90.
[7] Morita T,Takahashi S,Adama H,et a1.Rotational feedthrough using an ultrasonic motor and its performance in ultra high vacuum conditions[J].Vacuum,2003,70(1):53-57.
[8] 苏娜,芦丹,赵淳生. 超声电机在真空环境下的负载特性试验研究[J]. 振动、测试与诊断,2006,26(2):151-153.
Su Na, Lu Dan, Zhao Chunsheng. Experimental research on load characteristics of ultrasonic motor under vacuum condition[J]. Journal of Vibration, Measurement & Diagnosis, 2006,26(2):151-153. (in Chinese)
[9] 芦丹,郑伟,赵淳生. 超声电机真空环境试验研究[J]. 压电与声光, 2009,31(2):213-217.
Lu Dan, Zheng Wei, Zhao Chunsheng. The experimental research of ultrasonic motor in the vacuum environment[J]. Piezoelectrics & Acoustooptics, 2009,31(2):213-217. ( in Chinese)
[10] 郑伟,朱春玲,芦丹,等. 高温环境下旋转型行波超声电机性能研究[J]. 中国电机工程学报,2008,28(21):85-89.
Zheng Wei, Zhu Chunling, Lu Dan,et al. Research on characteristic of traveling wave type rotary ultrasonic motors under high temperature[J]. Proceedings of the Chinese Society for Electrical Engineering, 2008,28(21):85-89. (in Chinese)
