星载柔性可展桁架结构的模态试验与分析*
2018-05-04韦娟芳徐明龙赵建平
姚 科, 韦娟芳, 徐明龙, 赵建平, 冯 勃
(1.浙江大学建筑工程学院 杭州, 310058) (2.西安交通大学航天航空学院 西安,710049)
引 言
随着航天事业的迅速发展,空间结构日趋庞大,更大地展开结构可以满足更多的功能要求。由于运载工具有效空间的限制,许多空间结构(如空间平台大型可展天线、太阳帆、伸展臂等)必须以折叠压缩状态送入太空,进入预定轨道后再展开并组装为所设计的几何构形[1],因此,空间可展开结构的技术研究越来越受到人们的重视。空间可展结构在轨状态的动力参数,比如固有频率、振型及阻尼一直是人们关注的重点,因为这些参数对可展结构的姿态控制起着至关重要的作用[2]。
近些年由于商用有限元软件的兴起,国内外学者对空间可展开结构进行了大量的动力学分析,但动力学试验作为一种不可或缺的手段,依然在工程实践中被大量使用。可展结构的固有频率和振型是关注重点,故动力学试验的主要内容是模态试验。侯国勇等[3]对桁架式可展开天线进行了模态测试。冯长凯等[4]对3 m环肋可展开天线收态的结构特性进行了试验分析。Meguro等[5-8]对工程测试卫星(ETS-VIII)进行了地面动力学测试与分析。上述学者采用的方法均为锤击激振的SISO(single input single output,简称SISO)法,该方法属于单点激励频响函数测试技术,是一种宽频带激励,其力的频谱较宽,一次激励可以激出多阶模态[2],但是该方法适用固有频率大于2 Hz的结构(刚性结构),对于固有频率小于2 Hz的结构(柔性结构),由于结构本身太柔,仅仅通过人工操控激励锤并不能激发结构整体模态,因此必须考虑另外的试验方法。
激振器激振是模态试验中常用的激振方法,通过力传感器、激振杆和激振器的连接配合实现对试验件的激振。该方法优点在于可进行线性化均衡、激振力度和波形可控、激振稳定、信噪比高[9]。黄怀德等[10]在单点激振不能满足试验需求的情况下,开发并详细介绍了多点激振系统的硬件、软件的组成及配置。在研究导弹舵面热模态时,麻连净等[9]采用激振器加耐高温长激振杆的方法,取得较好的试验效果。针对目前激振器研发周期长、成本高及产品更新不及时等缺陷,刘大龙[11]重点对微型激振器的可动系统和磁路系统进行了优化,成功将激振器的效率及性能提高了一个等级。文献[12-13]还分别对磁吸力电磁激振器、高频电液激振器进行了研究,这些新型激振器相对于传统激振器,无论从性能还是精度上都有了很大的进步。
1 可展结构及悬吊系统
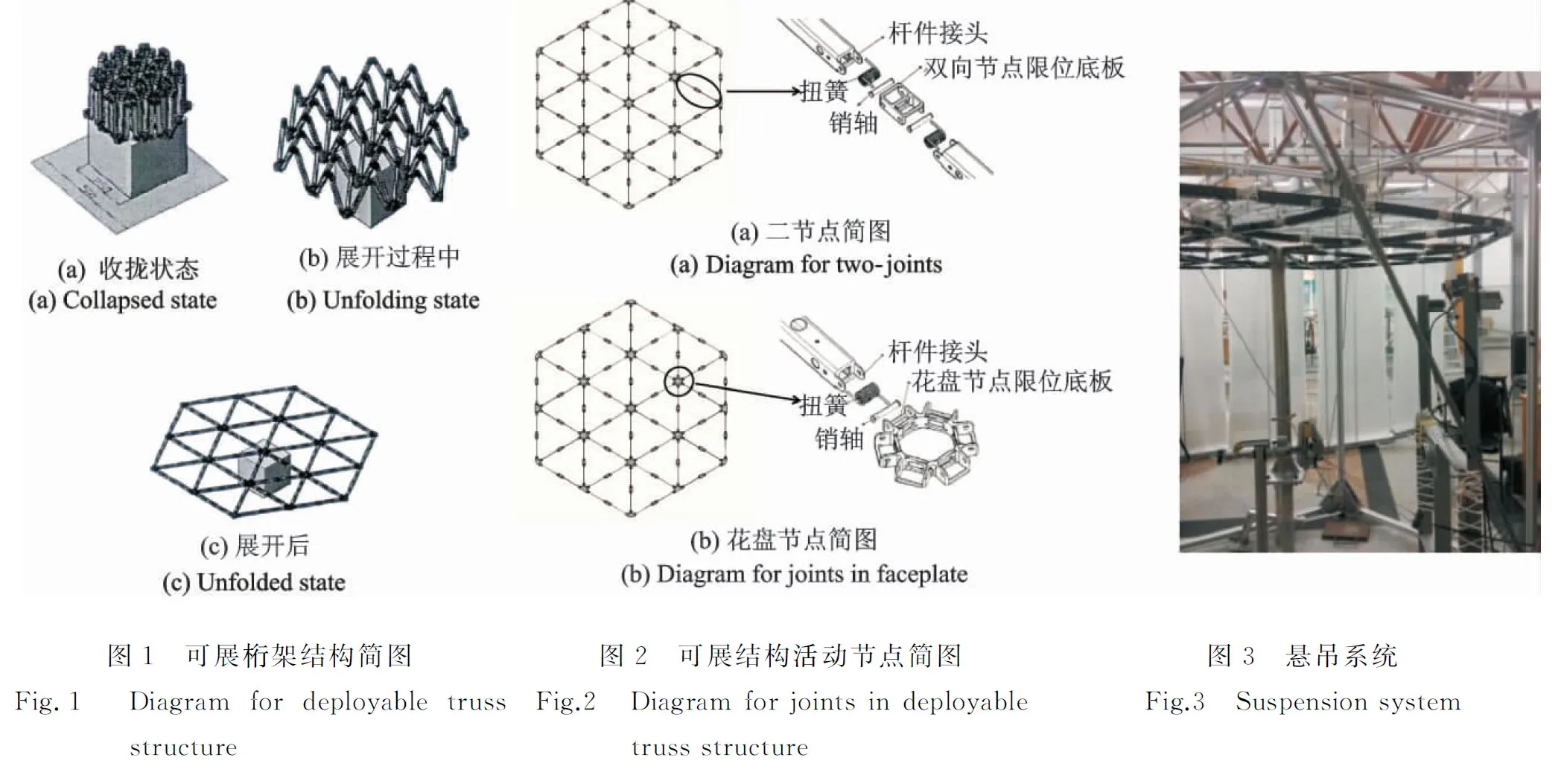
文中描述的可展桁架结构[14](如图1)是固定皮卫星上的可展反射面,碳纤维杆之间采用扭簧连接(如图2)。展开动力由扭簧提供,扭簧设计扭矩综合考虑展开动力、动力冲击及收拢难易多项因素,必须保持在合理的水平,这样就导致结构在展开状态下具有一定的柔性,人工施加强迫位移,观察结构振动的周期,表明该可展桁架结构的固有频率小于2 Hz。
为了准确地测试该结构的模态,笔者采用属于单点激励频响函数测试技术的另外一种方法——激振器激振法,并使用激光位移传感器计,该传感器不需要与展开结构直接接触即可得到测点的位置变化参数。由于该可展桁架结构在轨处于失重状态,故在模态试验中也应该消除重力的影响,本次试验采用绳索-弹簧系统外加单向滑轮式零重力吊架(如图3)作为可展结构的支撑系统[15],并将展开结构在竖直、水平两个方向分别悬挂测试,目的是消除吊悬吊系统本身模态的干扰。该方法为柔性结构模态试验提供了一条新的思路,试验结果与有限元分析结果数据对比表明,该试验结果较为准确,从而验证了试验方案的可靠性。
2 模态试验原理及设备
2.1 模态试验原理
模态是结构的固有振动特性,包括固有频率、振型和阻尼。模态参数获取的公式如(1)所示
(1)
其中:hij为响应自由度i与参考自由度j之间的频率响应函数;N为分析频带内模态个数;rijk为第k阶模态的留数;λk为第i阶模态的极点;符号“*”表示复共轭。
模态分析即模态参数识别也就是估计模型的参数,以便由模型所预估的数据尽可能逼近(通过曲线拟合)测量数据。通过模态分析,可以提供一组表征结构动力特性的模态参数。
2.2 模态试验系统
因为可展结构中扭簧刚度较低,导致杆件局部模态较低,而且杆件、接头、节点质量较小,若采用粘贴加速度传感器的方法,由于加速度自身重量会影响到局部模态的数值。所以采用非接触式激光位移传感设备采集结构响应,可以测量从直流开始的低频振动位移,并且没有附加质量。
在激励方式选择时,考虑到普通的激振设备(如振动台或通用电磁激振器)一般用于2 Hz以上的结构频率测试,无法满足超低频测试需求,因此本试验需要采用特殊的超低频激振器及驱动设备。
本试验采用比利时LMS公司的LMS SCADS III 数采前端(精度0.1‰)和Test lab 11B 模态测试分析软件系统,激振设备采用西安交通大学的超低频激振器(频率范围DC-200 Hz),位移传感器采用日本KEYENCE公司的LK3100激光位移传感器。试验系统框图如图4所示。
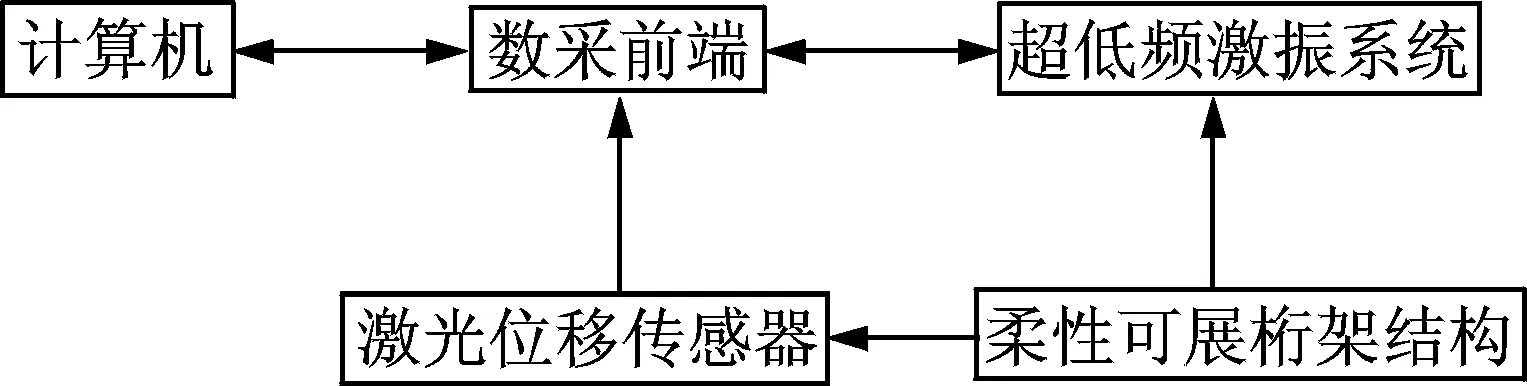
图4 模态试验系统框图Fig.4 Block diagram of modal test system
3 模态试验工装设计
3.1 可展结构模态试验固定方式
由于可展结构在轨飞行状态是中心花盘与小卫星星体固定连接,因此,为了真实模拟在轨的力学边界条件,试验中将通过中心花盘的6个M5螺纹孔连接到一个支柱,支柱接口为6个直径5.5 mm的通孔。可展结构的的重量为5 kg,根据模态试验规范,固定基础的重量必须是产品重量的8~10倍,所以中心立柱的底部固结的平板选择了700 mm×700 mm,厚度10 mm铁板,重量约40 kg。
3.2 绳索-弹簧重力卸载系统
由于可展结构是柔性结构,在试验时,必须同时利用吊索在每个花盘处进行零重力卸载,以模拟太空中的无重力状态。为了保证在模态测试的过程中,吊索对产品不产生过大的附加刚度,因此,在吊索中部增加柔性弹簧。弹簧的刚度取值方法如下:试验对象可展结构由84根杆件,19个花盘,42个二节点连接组成,模型总重量为5 kg。试验时将采用悬吊花盘,原则是每个花盘节点一个吊点。因此每个吊点平均承载2.58 N。弹簧的刚度设计值为K=0.05 N/mm。
3.3 中心花盘固定支架结构动态特性要求
可展结构和激振器由专门设计的支架支撑,支架的模态会对可展结构的模态有影响。要使其影响
较小,就要使支架的固有频率远离可展结构的固有频率,因而有必要通过试验了解支架的固有频率特性。通过在固定支架上安装加速度传感器,用力锤敲击支架上部、中部、下部等不同位置来完成测试,得到固定支架的传递函数,从而识别出固定支架的第1阶固有频率。
4 模态试验及结果
4.1 固定支架模态试验
固定支架本身的动力特性会对可展桁架结构的模态测试产生影响。为了降低这种影响,需要保证支架的固有频率远离可展结构的固有频率,因此进行模态试验考察固定支架的模态特性。


图5 固定支架敲击试验Fig. 5 The hammering experiment for bracket
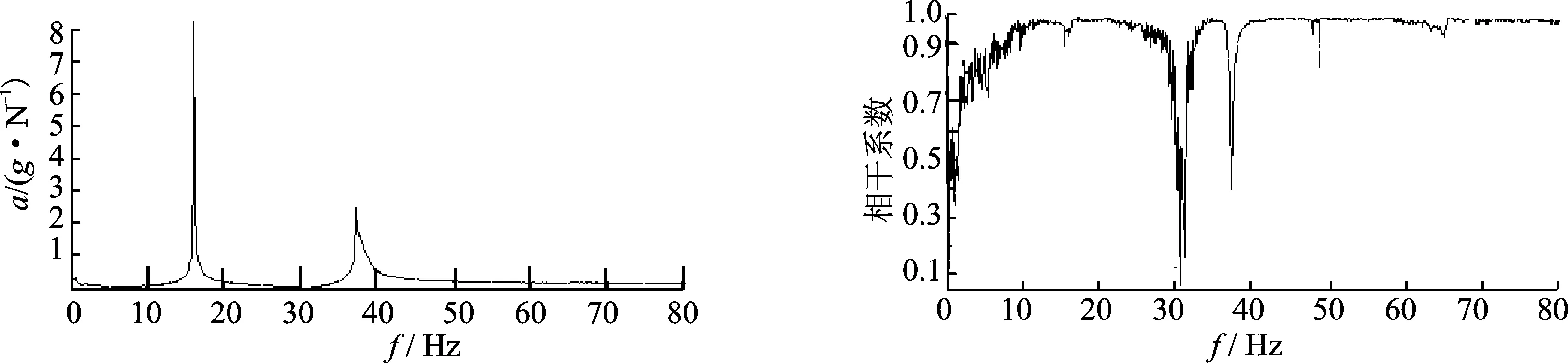
图6 支架的传递函数
Fig.6 Transfer function of bracket for exciter
图7 支架的相干函数
Fig.7 Coherence function of bracket for exciter
表1 支架基频
Tab.1Thefirstnaturalfrequencyofbracketforexciter(square)

敲击位置f0/Hz阻尼/%f0/Hz上部15.9740.16中部15.9780.1515.98下部15.9800.16
其他固定支架模态试验步骤相同,试验结果如表2所示。
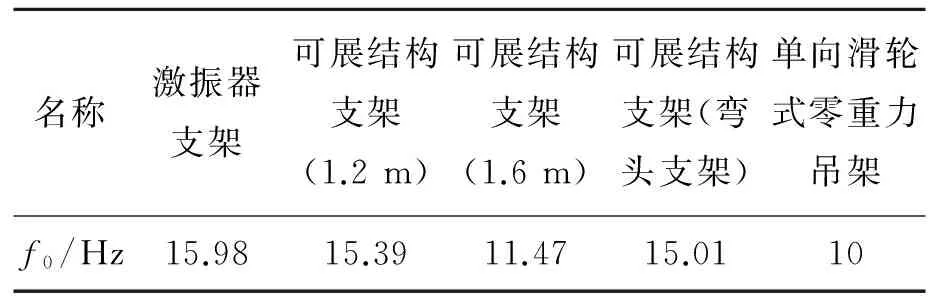
表2 固定支架基频表
测试结果表明,无论激振器支架、可展结构支架或滑轮吊架,其固有频率远高于可展结构,满足固定支架的频率远离柔性展开桁架结构频率的要求。
4.2 柔性可展桁架结构模态试验
可展结构模态测试的状态分水平和垂直两种状态,目的是为了考查不同悬吊状态下产品的模态特性,试验选择水平悬吊状态A(离地1.2 m)、水平悬吊状态B(离地1.6 m)、竖直悬吊状态(法向激励)和竖直悬吊状态(切向激励),如图8所示。采用单点激励、两点响应的试验方式,即在可展结构上选取1个激励点,采用超低频激振系统进行激励,激励方式选择为单点0.05~10 Hz扫频激励。
可展结构的每个花盘位置可作为一个测点,最多可布置19个测点,试验测点的编号如图9所示。测量方向垂直于可展结构平面,测点的响应采用激光位移传感器测量。实际测量时,由于花盘是镂空的,无法布置激光位移传感器,测点实际上布置在离花盘约5 mm的碳纤维杆上,相对整个桁架展开结构尺寸而言,偏移比例约为0.3%,显然可以忽略不计。
所有测点完成后,观察各个测点的传递函数和相干函数是否满足试验要求。测点12的传递函数和相干函数如图10,11所示,从图中可以看出响应和激励的相干性较好,试验数据可靠。
通过模态分析软件处理后的模态频率和阻尼如表3所示,模态置信矩阵(modal assurance criterion,简称MAC)值矩阵图形如图12所示。表中fg为固有频率。

图8 悬吊状态Fig.8 The suspended state

图9 可展桁架结构测点编号
Fig.9 Number of measuring point on deployable truss structure
图10 测点12的传递函数
Fig.10 Transfer function of measuring point 12
图11 测点12的相干函数
Fig.11 Coherence function of measuring point 12
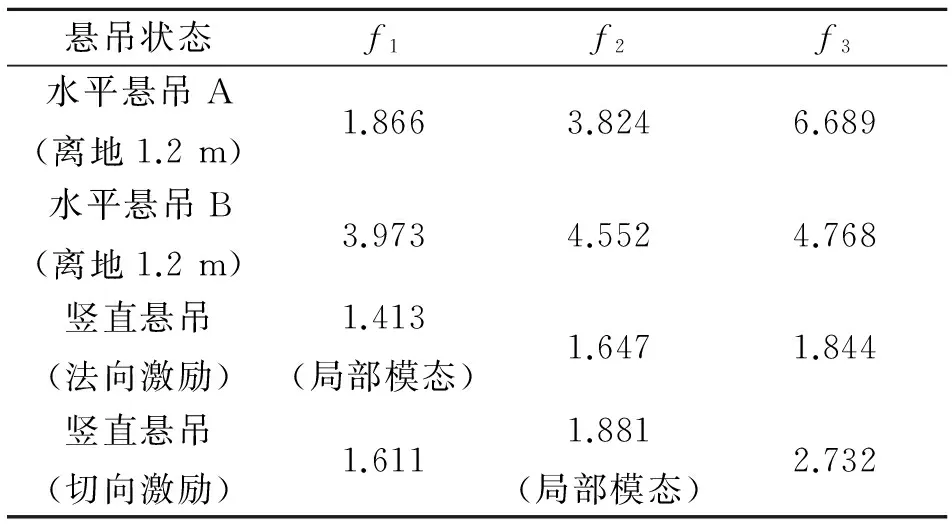
图8中的4种悬吊状态试验数据不再一一赘述,试验结果汇总见表4。表中:f1,f2,f3分别为1阶、2阶、3阶模态频率。
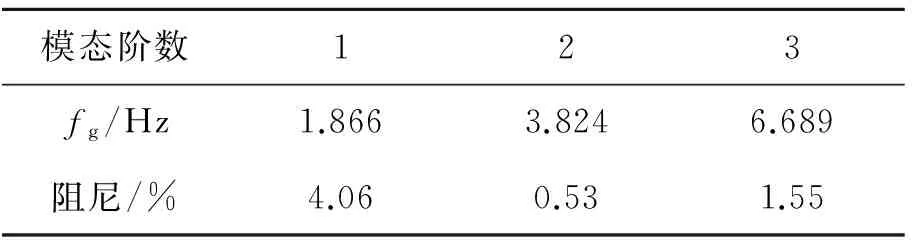
表3 测试结果

图12 模态试验结果MAC值矩阵图Fig.12 MAC value matrix of modal experiment results
Hz
由表4中的数据可知,柔性可展桁架结构在水平悬吊状态时,状态B测得的基频3.973 Hz比状态A的试验结果1.866 Hz超出了113%。之所以会出现如此大的差别,是因为水平悬吊时可展结构一共有18个悬吊点,结构本身的状态受绳索-弹簧悬吊系统的影响很大,试验测出的频率实际上很有可能是可展结构与悬吊系统综合作用的结果,并不能代表结构本身的频率。这一点,从基频随悬索长度(即水平悬吊状态A与水平悬吊状态B)而产生很大变化也可以证明。因此可以认为,将可展桁架结构水平悬吊进行模态测试不符合试验要求,其试验结果不符合实际情况。
竖直悬吊时,吊索的力只是沿可展结构的平面内,而在垂直于桁架平面的方向上没有约束力,试验结果受悬吊系统的影响较小,在误差范围内可认为试验结果准确。为了对结构可能发生的振型进行针对性激励,激励方向分为法向、切向两个方向(如图8(c)所示)。从阵型图可以看出,法向激励时第1阶模态均为局部模态,故取切向激励第1阶模态、法向激励第2,3阶模态作为试验最终结果。
5 有限元模态分析及结果对比
5.1 模态分析
为了进一步验证试验结果的准确性,笔者使用商业有限元软件对柔性可展平面桁架结构进行模态分析,扭簧的扭矩采用spring单元模拟,其他部件均按照实体建模,边界条件为固定中心花盘。花盘与碳纤维杆的连接节点建模如图13所示。为了模拟碳纤维杆相对于花盘节点的单向转动,建立一根梁,并在梁两端添加1-3水平梁和2-3竖直梁。3处梁节点与杆节点添加刚性杆;1-3梁与杆平面粘结,并且杆可绕1-3梁转动;2处梁节点与杆节点之间施加spring单元,模拟杆转动时受到的扭簧力矩。

图13 连接节点有限元模型Fig.13 The FEM of connecting joint
考虑到杆件局部重力引起节点转动接触面的正压力,以及铰链装配误差引起接触面挤压,这两种因素会造成节点的附加摩擦刚度,因此,在有限元模型中对节点的连接刚度进行了修正, 分析结果如图14所示。
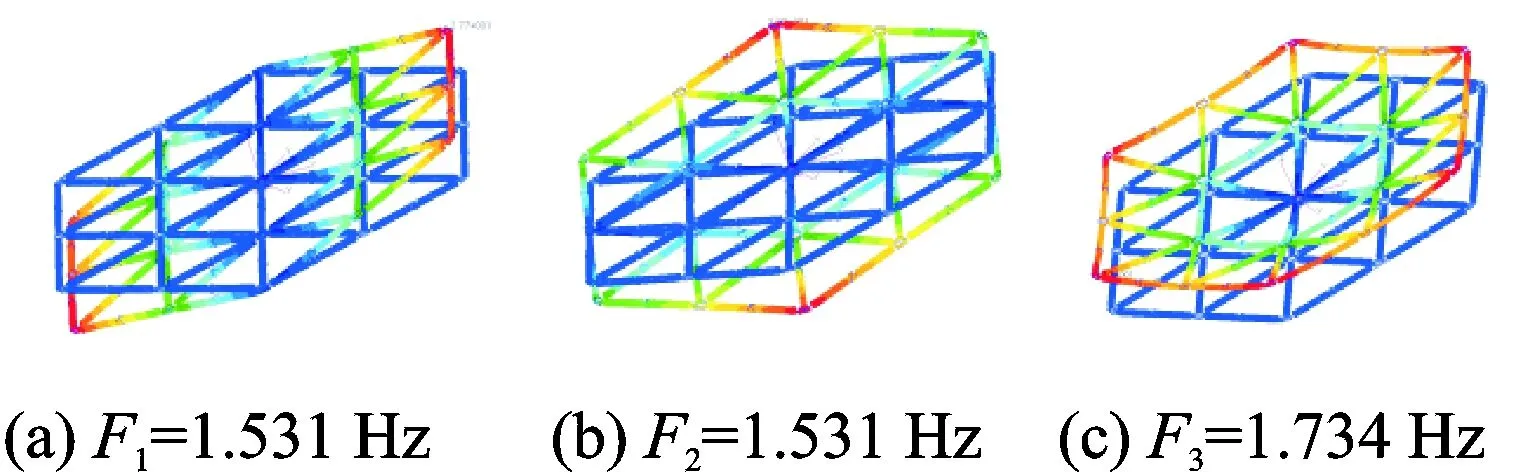
图14 前3阶频率及振型Fig.14 The first three frequencies and mode shapes
5.2 结果对比分析
有限元分析结果与试验结果对比如表5所示,两者相对误差小于10%,工程上认为误差处于可接受范围,说明该有限元模型分析结果是正确的。
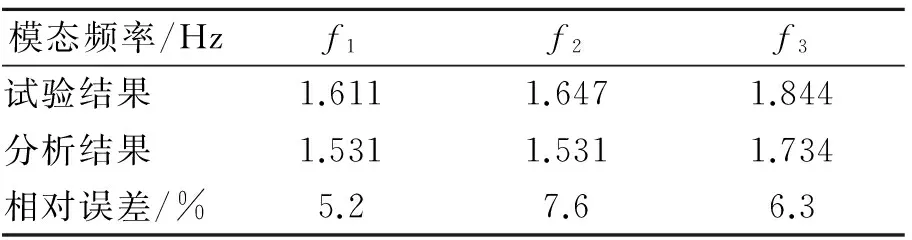
表5 分析结果与试验结果对比
6 结 论
1) 试验数据表明超低频激振器与激光位移传感器在模态试验过程中提高了试验的准确性,并且很适合该类柔性结构试验。
2) 将柔性可展平面桁架结构水平悬吊进行模态试验时,结构容易受到悬吊系统的干扰,对试验结果会产生比较大的影响,反而在竖直悬吊时,吊索的力分布在可展结构的平面内,垂直于桁架平面的方向上没有约束力,试验结果受悬吊系统的影响较小,故建议类似的柔性结构模态试验尽量采用竖直悬吊的试验方法。
3) 由于在轨是无重力状态,而地面试验虽然在每个花盘节点上进行了重力卸载,但仍然无法完全消除局部杆件重力对转动面引起的静摩擦刚度。因此在轨无重力状态下,模态频率的实际值应该小于地面测试数据。
[1] 赵孟良,吴开成,关富玲.空间可展桁架结构的动力学分析[J].浙江大学学报:工学版,2005,39(11):1669-1674.
Zhao Mengliang, Wu Kaicheng, Guan Fuling. Dynamic analysis of deployable space truss structures[J]. Journal of Zhejiang University:Engineering Science, 2005, 39(11): 1669-1674.(in Chinese)
[2] 黄元林.小卫星机构运动仿真与结构动态特性分析研究[D].杭州:浙江大学,2005.
[3] 侯国勇.桁架式展开结构设计、分析及试验[D]. 杭州:浙江大学,2008.
[4] 冯长凯.星载可可展结构的动力学仿真分析[D].西安:西安电子科技大学,2008.
[5] Meguro A, Shintate K, Usui M, et al. In-orbit deployment characteristics of large deployable antenna reflector onboard engineering test satellite VIII[J]. Acta Astronautica, 2009, 65(9):1306-1316.
[6] Meguro A, Ishikawa H, Tsujihata A, et al. Analysis and test methods for large deployable space structures[C]∥ 42nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference and Exhibit. Seattle WA:[s.n.],2011: 2212-2221.
[7] Meguro A, Ishikawa H, Tsujihata A. A study on the Accuracy of deployment testing for large deployable structures[C] ∥43rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference and Exhibit. Denver Colorado:[s.n.],2002:3107-3116.
[8] Meguro A, Jin M. Ground verification of deployment dynamics of large deployable spacestructures[J]. Journal of Spacecraft & Rockets, 1992, 29(6):835-841.
[9] 麻连净,蔡俊文.导弹舵面热模态试验激振方法研究[J]. 战术导弹技术,2013(6):20-25.
Ma Lianjing, Cai Junwen. Study of rudder thermo-modal test excitation method [J]. Tactical Missile Technology,2013(6):20-25.(in Chinese)
[10] 黄怀德, 郎德民, 黄卫瑜,等. 多点激振系统的模态试验技术[J]. 导弹与航天运载技术, 1999(6):23-31.
Huang Huaide, Lang Deming, Huang Weiyu, et al. The modal test technology of multipoint excitation system[J]. Missiles and Space Vehicles,1999(6): 23-31.(in Chinese)
[11] 刘大龙.一种微型激振器结构设计与优化[D].南京:南京航空航天大学,2015.
[12] 雷剑锋.基于磁吸力的电磁激振器研究[D].成都:西南交通大学,2015.
[13] 任燕.高频电液激振器的特性研究[D].杭州:浙江工业大学,2011.
[14] 曹长明, 关富玲. 小型星载预应力可展开结构的可靠性研究[J]. 低温建筑技术, 2015, 37(11):34-37.
Cao Changming, Guan Fuling. The reliability analysis of small spaceborne prestressed deployable structures[J]. Low Temperature Architecture Technology,2015, 37(11): 34-37.(in Chinese)
[15] 韦娟芳. 卫星天线展开过程的零重力环境模拟设备[J]. 空间电子技术, 2006, 3(2):29-32.
Wei Juanfang. Zero-gravity environment simulation equipment in the process of satellite antenna deployment[J]. Space Electronic Technology,2006, 3(2):29-32.(in Chinese)
