航空影像直角房屋轮廓半自动提取
2018-05-04李大军杜神斌郭丙轩薛万唱
李大军,杜神斌,郭丙轩,薛万唱,游 琦
(1. 东华理工大学测绘工程学院,江西 南昌 330013; 2. 武汉大学测绘遥感信息工程国家重点实验室,湖北 武汉 430079; 3. 武汉讯图科技有限公司,湖北 武汉 430079; 4. 福州市勘测院,福建 福州 350000)
随着摄影测量技术进入数字化摄影测量时代,摄影测量也进入了全数字化时代[1]。在航空影像中,城区80%的人工目标物为建筑物和道路[2],建筑区域作为人类活动的主要场所,识别和提取建筑物具有很重要的意义。另外,建筑物作为地物类别中主要内容之一,建筑物的识别和提取也会直接影响地物提取的自动化水平。
近年来,国内外学者对于航空遥感图像上建筑物提取的方法作了大量的研究,主要分为半自动提取和自动提取两种方法。房屋提取算法大多为基于边缘特征的灰度信息和几何约束的整体优化计算[3-6]。对于半自动提取,如Freeman编码和Hough变换相结合的直角型房屋半自动提取的方法[7]、基于Snake和动态规划提取房屋轮廓[8],以及一种几何约束和影像分割相结合的快速半自动房屋提取的方法[9]等,这些方法的区别只是优化计算的手段不同,对于实用化的算法来说,还应该考虑如何实现高效的人机交互。对于全自动提取,如基于原始激光雷达点云数据使用规则化提取建筑物轮廓的方法[10]、利用多层次特征的建筑提取算法[11],以及一种把相邻匹配点中获取的高度信息作为约束,进行线部分分组,在多边形建筑边界的先验知识指导下对每一个高度层进行线分组,然后在立体航空影像中提取建筑物的方法[12]等,这些方法都只是依靠影像,很难分离出建筑物区域和非建筑物区域,建筑物周围的道路边界和阴影部分会对轮廓提取造成干扰,因此准确自动提取房屋轮廓技术的难度仍非常大。
由于影像本身存在对比度较低的情况,现有的边缘检测算法不够成熟,因此一般情况下不能完整地表达房子在影像中所具有的几何特征信息,而房屋边缘附近的阴影部分及各种微小物体的存在会干扰房屋边缘信息。边缘信息直接决定了直线提取结果的好坏,也直接反映了边缘检测的结果,因此检测出许多房屋存在边界不够完整、一条长边分裂成好几条短线、距离边界处出现一系列疑似边界直线的问题。
良好的直线处理方法可以弥补边缘检测算法的不足,为此本文使用LSD算法[13]进行边缘检测,使用最小二乘算法进行直线的拟合和直角化。由于建筑物的自动提取过程复杂而比较难以实现,尤其是在复杂场景中,全自动提取由于受场景限制适用性更差,人机交互的半自动建筑物提取适用性更好,因此本文围绕直角房屋进行人机交互半自动提取。
1 直角房屋提取的方法和策略
建筑物多边形主要是由相互垂直的直线段构成[14]。本文提出的直角房屋半自动提取算法,主要采用LSD算法进行边缘检测,采用最小二乘法对提取的边缘线进行拟合和直角化。目的是在结合房屋
的实际特征的条件下,尽量保证其提取结果的稳健性和准确性。具体流程如图1所示。

图1 算法流程
1.1 直线条件约束的影像分割
影像分割是图像处理中一种很常见的技术方法。在航空影像的房屋提取中,可以利用影像分割对房屋进行识别和定位。虽然影像分割算法无需人工标定,但还是需要人工操作在房屋边缘画出大致位置,本文通过人工目视解释在影像的房屋边缘位置上画一条直线,然后通过式(1)得到一个窗口影像,最后对窗口影像进行处理。由于不需要操作人员十分精确地标记房屋边缘直线,因此减轻了操作人员的劳动强度。
dst(x,y)=src(M11x+M12y+M13,M21x+M22y+M23)
(1)


图2 获取窗口影像
1.2 直线检测
本文使用LSD算法进行直线检测。LSD算法是Rafael Grompone Von Gioi等于2008年在Burns等所提出方法的基础上,引入直线支撑区域概念后提出的一种新的直线检测算法。
1.2.1 提取直线支撑区域
首先将原图像降采样按比例缩小80%,然后根据式(2)计算降采样后图像中每个像素的梯度。
(2)
式中,I(x,y)为像素(x,y)的灰度值。像素(x,y)的梯度方向为
(3)
像素(x,y)的梯度幅值为
(4)
为了提高算法的效率,将所有像素的梯度按大小进行排序,将梯度值小于阈值ρ的像素剔除,一般设置图像灰度量化误差上限q为2个像素,设置像素点生成直线支撑区域时梯度方向角的最大容差为τ,则ρ为
(5)
直线支撑区域的生成过程为:首先引入辅助矩阵STATUS用于标记像素的使用状态,初始化像素为NOT USED;对于梯度大于ρ的像素在STATUS矩阵中标记USED;以梯度最大的像素点P开始检测直线段,并标记该状态为NOT USED:把P点作为种子点开始进行区域生长,在P点连接,与P点梯度角小于一定阈值的点进入生长区域,并标记该状态为USED。
1.2.2 直线支撑区域的矩形估计
得到直线的支撑区域后,对该支撑区域进行矩形估计,计算矩阵的中心、方位角、长度和宽度。并利用该矩形对直线进行表示,如果在直线支撑区域中匹配的像素点的密度小于阈值D,则对这个直线支撑区域进行处理,减小角度阈值,减小直线支撑区域的半径。
1.2.3 直线误检计算

(6)

利用LSD算法对窗口影像进行直线检测后,同时设置直线的阈值,即所检测的线段和画的直线夹角不得超过±10°,所检测的线段的两个端点到所画直线的距离均不得超过15个像素。然后将不满足阈值条件的直线段删除,如图3所示。
1.3 最小二乘拟合和直角化
在理想的情况下,LSD算法检测出的直线闭合且连通,但在实际中,由于噪声和阴影的影响,检测出来的直线往往为一些不连续的直线段。又因为扫描纠正误差、测量误差和立体测图误差导致图像的内角和多边形的实际直角存在一定的偏差[15],解决房屋边缘线直角化的问题必须满足2个条件:一是将近似矩形的房屋直角化为矩形房屋;二是保证每个角点整体位移和数值偏差最小。因此在精度允许的范围内利用最小二乘算法对这些直线段进行线拟合和直角化,如图4所示。
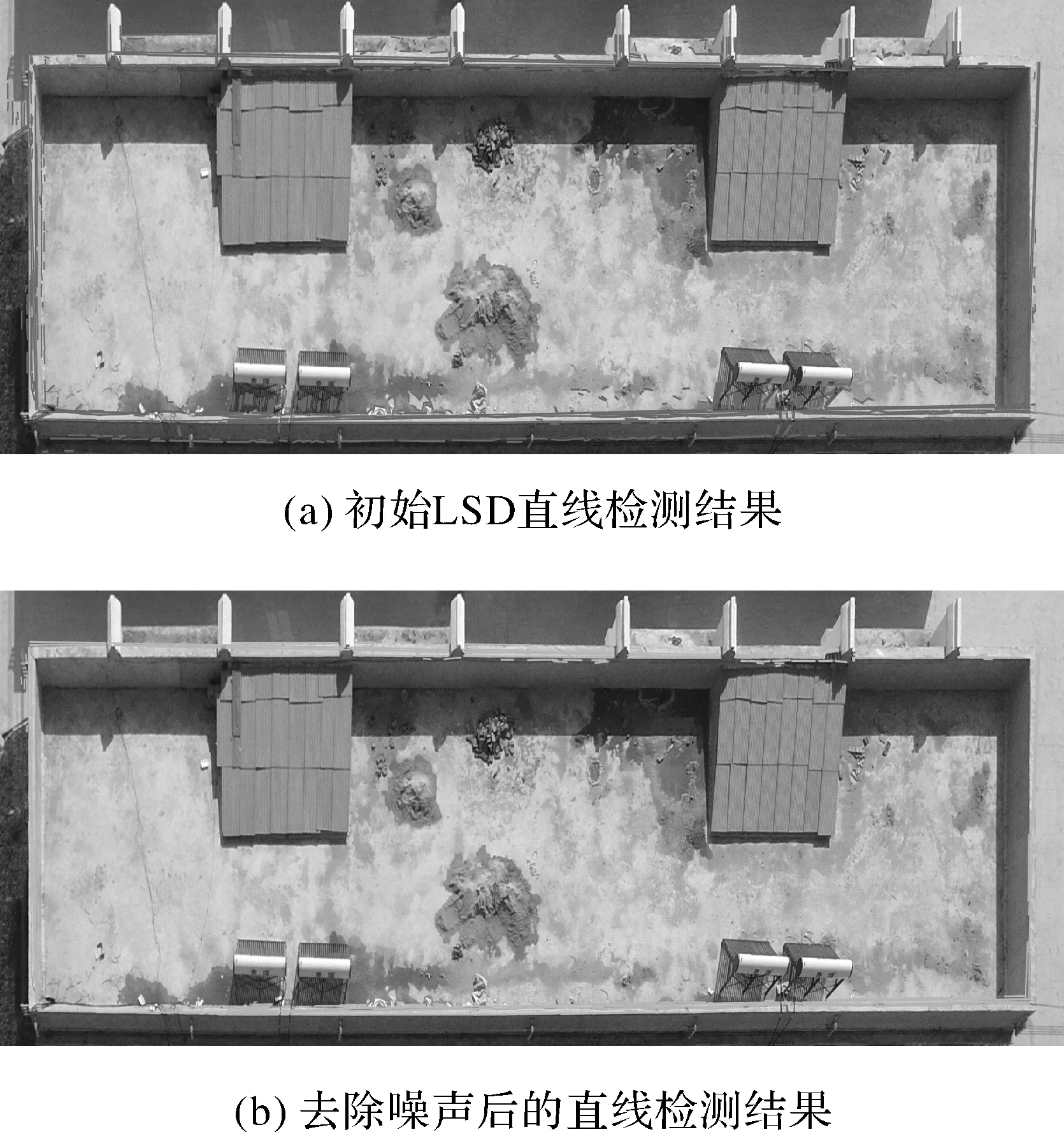
图3 LSD直线检测结果

图4 直角化
(7)
式(7)可以转换为
(8)
根据最小二乘算法原理令Ax=0,由奇异值分解[16]SVD(ATA)=USVT可得方程解。然后通过式(9)求得矩形改正后的角点坐标,最后将矩形改正后的角点坐标在原图上绘制并导出改正后的角点坐标。
(9)
2 试验结果与分析
利用该算法在内存为32 GB,CPU为Intel(R) Core i5-4430 CPU @ 3.00 GHz的硬件环境下进行试验。考虑到以上原因,本文选择20套无人机影像图作为试验数据,然后从中选出3个典型的直角房屋为例说明。图5(a)为原图;图5(b)为本文算法提取直角房屋的结果,其中黑线是手工画的种子线,白线是提取的结果;图5(c)为提取结果图像局部放大图。试验结果表明,本文方法只需要操作人员少量的编辑工作,对于同样的房屋,本文方法只需要1 s的时间,比完全人工切准提取速度快得多。从局部放大图可以看出,本文方法在边界阴影和干扰线较多的情况下仍然可以很好地提取房屋的轮廓线,所提取的结果与实际的房屋边缘基本吻合,定位精确性较好。

图5 试验结果
3 结 语
由于本文方法不需要人工标定,只需要用鼠标在房屋边缘线处粗略地画一条直线,就可以快速得到十分精确的边缘轮廓信息,利用最小二乘算法以误差平方和最小为前提进行线拟合和直角化。试验结果表明,基于LSD直线检测和最小二乘拟合和直角化的直角房屋半自动提取方法不仅很大程度上提高了提取速度、减轻了操作人员的工作强度,而且还可以获得高于人工切准的定位精度。
参考文献:
[1] 张祖勋.由数字摄影测量的发展谈信息化测绘[J].武汉大学学报(信息科学版),2008,33(2):111-115.
[2] 明冬萍,骆剑承,沈占锋,等.高分辨率遥感影像信息提取与目标识别技术研究[J].测绘科学,2005,30(3):18-20.
[3] COTE M,SAEEDI P.Automatic Rooftop Extraction in Nadir Aerial Imagery of Suburban Regions Using Corners and Variational Level Set Evolution[J].IEEE Transactions on Geoscience and Remote Sensing,2012,51(1):313-328.
[4] 杨化超,邓喀中,张书毕.基于Hough变换的航空影像建筑物半自动提取[J].测绘科学,2006,31(6):93-94.
[5] SHACKELFORD A K,DAVIS C H.A Combined Fuzzy Pixel-based and Object-based Approach for Classification of High-resolution Multispectral Data over Urban Areas[J].Geoscience and Remote Sensing IEEE Transactions on,2003,41(10):2354-2363.
[6] 胡勇,张孝成,马泽忠,等.无人机遥感影像中农村房屋信息快速提取[J].国土资源遥感,2016,28(3):96-101.
[7] 秦永,宋伟东.基于Freeman编码的遥感影像直角型房屋半自动提取方法研究[J].测绘科学,2009,34(6):203-205.
[8] 杨贵宝,李瑞俊,高霞.基于Snake和动态规划优化的屋顶轮廓提取算法[J].内蒙古大学学报(自然科学版),2015(6):664-671.
[9] 张煜,张祖勋,张剑清.几何约束与影像分割相结合的快速半自动房屋提取[J].武汉大学学报(信息科学版),2000,25(3):238-242.
[10] SAMPATH A,SHAN J.Building Boundary Tracing and Regularization from Airborne LiDAR Point Clouds[J].Photogrammetric Engineering and Remote Sensing,2007,73(7):805-812.
[11] 吕凤华,舒宁,龚龑,等.利用多特征进行航空影像建筑物提取[J].武汉大学学报(信息科学版),2017,42(5):656-660.
[12] HAO L,ZHANG Y,CAO Z.Building Extraction from Stereo Aerial Images Based on Multi-layer Line Grouping with Height Constraint[C]∥Geoscience and Remote Sensing Symposium.[S.l.]:IEEE,2016.
[13] GIOI R G V,JAKUBOWICZ J,MOREL J M,et al.LSD:A Line Segment Detector[J].Image Processing on Line,2012,2(4):35-55.
[14] 郭仁忠,艾廷华.制图综合中建筑物多边形的合并与化简[J].武汉测绘科技大学学报,2000,25(1):25-30.
[15] 王立新,朱伟.基于ArcGIS的1∶5万DLG数据库生成地形图的设计与实现[J].测绘通报,2008(5):58-61.
[16] 鲁铁定,宁津生,周世健,等.最小二乘配置的SVD分解解法[J].测绘科学,2008,33(3):47-51.
