周期环境下集装箱码头资源分配的动态干扰管理
2018-05-04韩笑乐钱丽娜陆志强
韩笑乐, 钱丽娜, 陆志强
(同济大学 机械与能源工程学院,上海 201804)
在集装箱进出口码头,泊位堆场作为关键资源相互制约又紧密联系,因此如何有效分配成为提升码头作业效率的关键.在研究初期,众多学者关注于单类资源的调度分配.Bierwirth等[1-2]及Carlo等[3]分别对海侧和堆场方面的现有研究进行了综述整理.随着研究的发展,多资源协同调度逐渐成为研究的趋势[4-8].
为了方便集装箱的运输管理,船运公司往往会定期访问相关码头(一般按周),即船舶的到港具备周期性的特征.依据船舶到港的周期性特征,码头依照船运公司所给定的预计到港时间对船舶进行作业资源预安排,即制定中长期模板,其具有周期重复性及稳定性的特征.模板的周期重复性指的是模板计划在一定周期内重复,简化执行过程中周期与周期间的资源分配变动;稳定性体现在每个周期的模板均与上一周期相同,便于码头提前安排作业.通常情况下,码头会依据模板的资源安排对到港船舶进行作业分配.而实际作业中各种不确定因素不可避免,如恶劣天气,作业故障,设备停机等.一旦干扰事件发生,会扰乱模板的执行情况,使得码头管理人员不得不对现有计划进行调整,甚至重新安排,造成实际执行的计划与模板的相差过大,原有的作业计划意义降低,增加了码头的作业负担.
干扰管理是对干扰事件发生后的应急处理方式,保证以尽量小的扰动恢复系统的正常运作.与重调度相比更注重于减小与原有模板之间的偏差.干扰管理作为实时处理干扰事件的方法逐渐受到学术界的关注.Zeng等[9]在集装箱码头的泊位分配问题的基础上,建立干扰管理模型,并采用仿真优化的方式进行求解.Zeng等[10]通过岸桥重调度及泊位重分配应对突发的中断现象,以最小化延迟成本以及最优泊位的惩罚成本作为目标函数.Li等[11]对集装箱码头的泊位与岸桥建立干扰管理模型,采用反应恢复策略,在这种策略下,泊位被限制在一定的空间范围内,岸桥能够在船舶之间转移,目的在于使得码头的服务质量最大化的前提下降低调整成本.Liu等[12]将干扰恢复的重调度问题分为两部分执行,包括第一部分泊位位置、靠泊时间以及岸桥数量的分配和第二部分对每个岸桥的具体调度.Gui等[13]研究由于船舶的延迟或者计划到港但取消到港或者未在计划中的船舶临时到港等干扰因素对泊位调度的影响,提出了基于人机交互的邻域搜索,依照干扰的类型影响程度等生成初始解,并且在迭代过程中进行修正.针对于集装箱码头,Li等[14]考虑由于船舶延迟造成的干扰因素,基于干扰管理提出了调整框架,并采用自适应的遗传算法以及计算机仿真优化的方式进行求解.Umang等[15]以散货港作为研究对象,在已知泊位调度模板的前提下,从干扰恢复的角度,对泊位分配的实时恢复进行研究.Umang等[16]考虑船舶的到港时间以及作业时间不确定性,假设船舶预计到港信息随着时间动态更新,以滚动计划的形式求解泊位分配问题,目标函数是最小化实时的计划成本,提出了基于集合划分和智能贪婪算法的优化恢复算法对问题进行实时的求解.
本文基于码头的实际作业特性,从动态干扰管理的角度出发,借鉴并使用针对复杂多阶段随机优化过程的、基于二阶段近似优化模型的决策框架[17],提出泊位-堆场的协同动态干扰恢复模型,基于滚动周期的动态决策框架,且在各周期决策点,提出两阶段决策框架.一方面预先考虑不确定因素,对后续若干周期的作业进行随机场景下的预调度,增强当前周期执行计划的鲁棒性;另一方面充分利用不断更新的确定性信息和最新掌握的不确定信息,将部分调度决策延迟,并保留前述预调度在下一决策点修改的权利,提高决策的灵活性.
1 问题描述与决策框架
1.1 周期性泊位堆场资源协同分配
基于码头的实际作业,现对问题做如下设定:考虑连续型泊位;船舶动态到港并具有周期性,且模板已定;其他资源不受限制,所有船舶均能以预定的速度进行作业,堆场内集装箱数量的改变可以瞬间完成;船舶到港前出口箱需要提前在堆场预留,船舶离港后进口箱需要留存一定时间,且设定预留与留存时间相等;时间轴和泊位长度分别作离散化处理,离散单位分别为4 h和50 m.如表1所示为参数及决策变量.

表1 参数及决策变量Tab.1 Parameters and decision variables
依照以上定义的参数与决策变量及周期性环境下的泊位堆场资源分配在时间上的关联,将“泊位-时间”与“堆场-时间”置于同一张图,具体如图1所示.在“泊位-时间”分配图中,中间白色矩形表示船舶的作业时间及泊位占用,如果两个矩形之间相互重叠,表示这两艘船在时间或空间上存在一定的冲突,在实际作业过程中不允许发生的;而浅灰色矩形的长度表示船舶作业开始时间与到达时间之差,即船舶的作业延迟等待时间;深灰色矩形分别表示船i需要提前或延后占用堆场的时间.而在“堆场-时间”分配图中,描述了本周期内由于船舶的装卸载作业,堆场集装箱库存的变化情况,包括出口箱提前存放到堆场到进口箱留存时间结束离开堆场整个过程中堆场集装箱数量的波动情况.
此外,由于周期性的存在,在实际作业中每个周期均可能存在尚未完成作业的船舶,这将占用部分下一周期的资源,即还需要考虑其他周期船舶对本周期资源占用的情况,因此设置虚拟船舶应对这些跨周期船舶的资源占用问题.虚拟船舶当前周期的调度计划中并非真实存在,而只用作码头资源的提前占用.图中虚线部分即为本周期内的虚拟船舶,其资源占用包括上一周期未完成作业以及下一周期需要提前存放的集装箱的船舶造成的.

图1 周期性泊位堆场分配示意图Fig.1 Interrelationship between berth-yard resourceallocation in periodic environment
1.2 干扰环境下动态决策框架
由于船舶的到港时间及市场需求的不确定是大多数干扰事件的源头,且其不确定性随着时间的推移准确度越高,越靠近船舶的期望到达时间,码头对其掌握的信息越准确.一旦船舶离开上个港口,其集装箱的装卸载量已定,但与模板制定时会有一定差异.而到港时间的不确定仅存在于部分船舶中,其余到港时间与所制定的模板相同,且船舶的准确到港时间能够提前一天准确获得.
依据已知参数以及所需决策的变量,将一定时间内到港的船舶分为以下3类(其中周期k的是从时间点k到时间点k+1的时间段),如图2所示.
(1)A类:在决策点k时已经开始但未完成作业.(船0、船1)
(2)B类:在决策点k尚未开始作业,但将在k周期内到达.包括某些会在周期k内开始作业(船3、船4、船5), 某些预计会延迟到下一周期(船6、船2).
(3)C类:在k+1~k+TL(k+3)周期内到达(船7、船8、船9、船10、船11、船12、船13).

图2 周期k码头决策示意图Fig.2 An example of vessel scheduling planning at k
不同类型船舶将执行不同的决策方式:A类船的作业已经开始,因此不需要进行决策,按照其上一周期所分配的资源继续作业.B类船引入决策延迟判断因子ui,用于判断该船舶是否需要被延迟到下一周期重新做决策,若延迟则令ui=1,否则ui=0.依照ui的取值,将B类船分为B0和B1两类,对于B0类船,需要进行第一阶段的固定性决策,决策量包括作业开始时间si、作业结束时间ei、泊位位置bi和进口箱堆场留存截止时间gi.而B1类船和C类一样,在本阶段需要进行各场景下的可调整预决策,并且在后续阶段保留修正的权利.
1.3 各阶段滚动机制
假设图2为周期k时码头管理人员所做的决策示意图,在决策点时,船0和船1已经开始作业,因此在本周期内不需要对其决策,将被分为A类船.船2、3、4、5、6作为能够在该周期内到达的船舶,并不是所有船都能够在本周期内被安排开始作业.按照该优先级列表进行作业安排,2、6号船将被延迟到下周期重新决策.其余预计在k+4前到港的船舶将被分为C类,将于B1类船一起决策,但并不在该周期内执行.
在周期k+1开始前,周期k所做的决策已经执行完毕,相关信息也已经更新.假设图3是周期k+1码头管理人员所做的决策示意图.图2与图3的对比,可以明确的了解滚动的机制,具体如表2所示.
为了更好描述干扰情况下的动态更新过程,现以以下4船作为例子进行说明,各参数如表3所示.船2由于干扰事件,其到港时间需要延迟13h,导致其不能按照模板开始作业,针对如上干扰,分别对时刻0及时刻24的作业安排如表4所示.

表2 动态更新机制Tab.2 Dynamic update mechanism
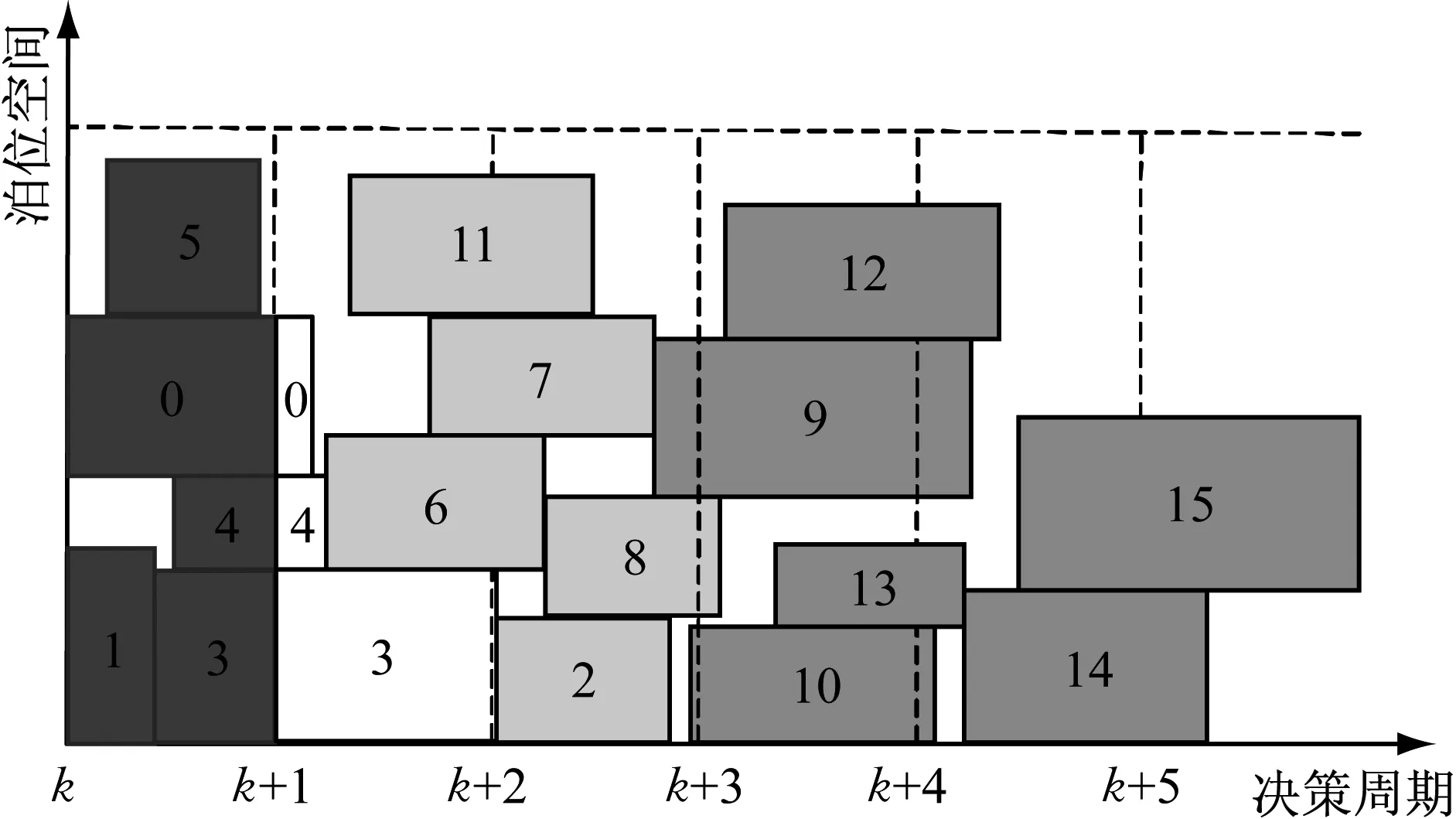
图3 周期k+1码头决策示意图Fig.3 An example of vessel scheduling planning at k+1表3 示例船舶参数Tab.3 Parameters of example vessels

船舶编号预计到港时间点模板开始时间点真实到港时间点模板作业时间/h真实作业时间/h11313138922020331010323252398430303078
2 二阶段近似优化模型
基于前述参数和决策的动态性分析,建立决策点k的二阶段优化模型,以最小化与模板的偏差作为计划调整成本作为目标函数,包括对应的第一阶段固定性成本以及第二阶段各场景下的可调整期望成本.在各个场景ω中补充参数,并对决策变量进行更新.修正后的参数及变量设置如表5所示.

表4 各时刻作业安排表Tab.4 Scheduling planning at each time point
依据以上更新的参数及决策变量,同时结合问题的描述及已知的周期性模板,对决策点k建模如下:
目标函数:
(1)
约束条件:
-Mui≤si,ω-si,1≤Mui,∀i∈VB,ω∈Ω
(2)
M(ui-1)≤si,ω-Tk+1≤Mui,∀i∈VB,ω∈Ω
(3)
-Mui≤bi,ω-bi,1≤Mui,∀i∈VB,ω∈Ω
(4)
si,ω=sR,i,∀i∈VA,ω∈Ω
(5)
fi,ω=fR,i,∀i∈V,ω∈Ω
(6)
bi,ω=bR,i,∀i∈VA,ω∈Ω
(7)
si,ω≤txit,ω+M(1-xit,ω),∀i∈V,t∈T,ω∈Ω
(8)
ei,ω≥txit,ω,∀i∈V,t∈T,ω∈Ω
(9)
fi,ω≤tyL,it,ω+M(1-yL,it,ω),
∀i∈V,t∈T,ω∈Ω
(10)
ei,ω≥tyL,it,ω,∀i∈V,t∈T,ω∈Ω
(11)
si,ω≤tyD,it,ω+M(1-yD,it,ω),∀i∈V,t∈T,ω∈Ω
(12)
gi,ω≥tyD,it,ω,∀i∈V,t∈T,ω∈Ω
(13)

(14)
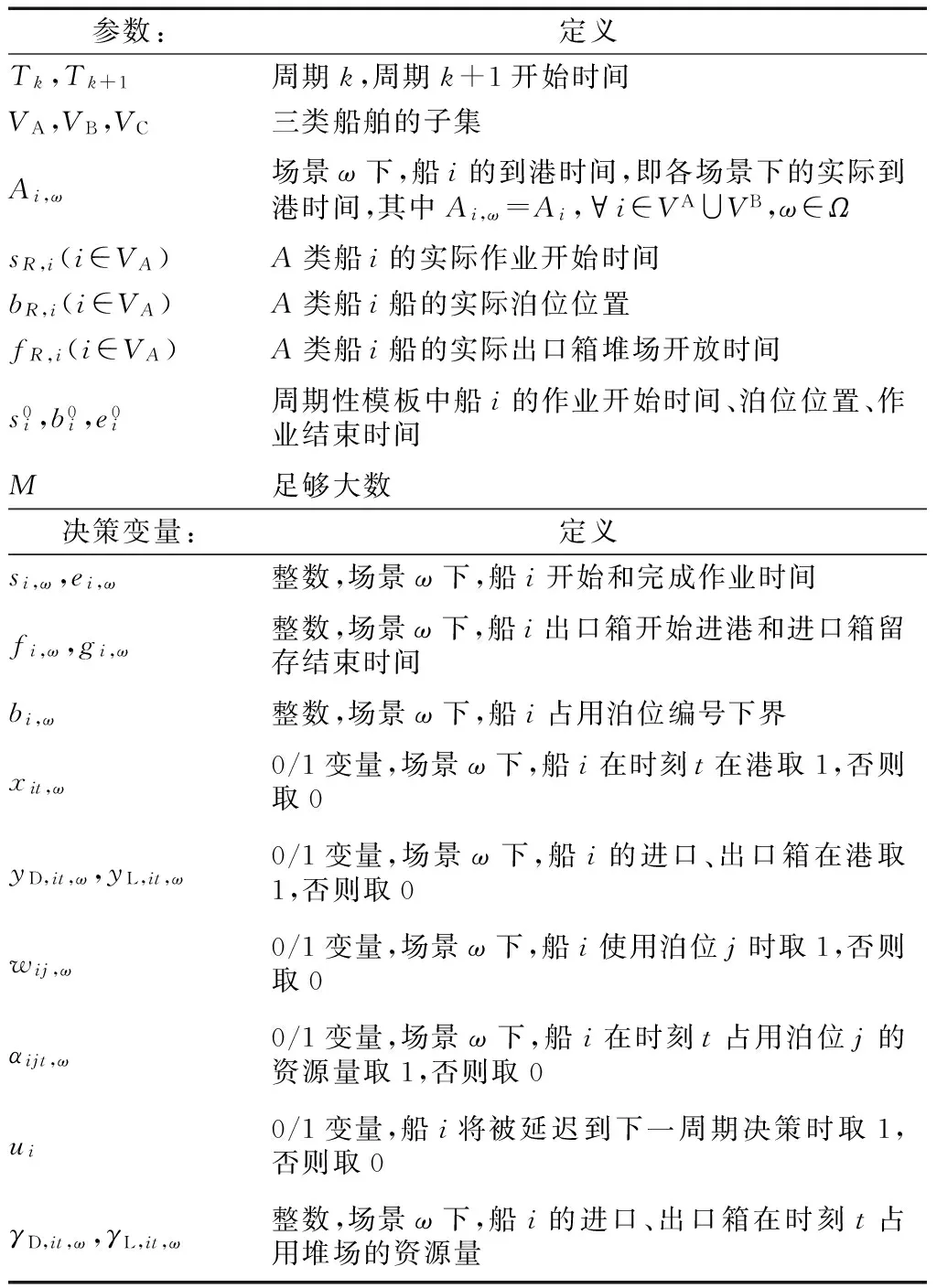
表5 修正参数及变量设置Tab.5 Modified parameters and decision variables
gi,ω=ei,ω+TD,∀i∈V,t∈T,ω∈Ω
(15)

(16)

(17)

(18)
bi,ω≤jwij,ω+M(1-wij,ω),∀i∈V,j∈J,ω∈Ω
(19)
bi,ω+Li-1≥jwij,ω,∀i∈V,j∈J,ω∈Ω
(20)

(21)
(xit,ω+wij,ω-1)/2≤αijt,ω≤(xit,ω+wij,ω)/2,
∀i∈V,j∈J,t∈T,ω∈Ω
(22)

(23)
γD,it,ω=yD,it,ωND,i,∀i∈V,t∈T,ω∈Ω
(24)
γL,it,ω=yL,it,ωNL,i,∀i∈V,t∈T,ω∈Ω
(25)

(26)

(27)
si,ω,ei,ω∈{Ai,…,T},∀i∈V,ω∈Ω
(28)
fi,ω∈{-TL,…,T},∀i∈V,ω∈Ω
(29)
gi,ω∈{Ai,…,T},∀i∈V,ω∈Ω
(30)
bi,ω∈{1,…J-Li+1},∀i∈V,ω∈Ω
(31)
xit,ω,yD,it,ω,yL,it,ω,wij,ω,αijt,ω∈{0,1},
∀i∈V,t∈T,ω∈Ω
(32)
ui∈{0,1},∀i∈VB
(33)
为了保持码头作业安排的稳定性,在每个决策周期考虑目标函数(1)最小化与已知模板的偏差,包括时间及空间上的偏差值.由于在模板制定以及真实执行过程中存在市场需求的不确定性,其作业时间会存在一定的偏差,因此以作业结束时间的偏差作为时间偏差的衡量,而空间上的偏差则以泊位差异来体现,依据Umang[16],时间与空间偏差的比例为500 m相当于1 h,因此按照现有的单位精度λ=0.025.

3 双层嵌套禁忌搜索算法
在决策点k上的二阶段近似优化问题可以看作是基于场景的混合整数规划模型,依照该模型的特点及决策逻辑,提出了双层嵌套动态禁忌搜索(Tabu Search,TS)框架,包括在第一阶段需执行的固定性决策ξk及第二阶段各场景下的可调整决策ξk+1,其步骤如下:
获取初始优先级列表L0:L*∶=L0
TS1开始
构建集合N(L*):随机更换B类船在列表的顺序⟹[L](首个循环包括L*)
对所有的L∈N(L*),若Π(L)未禁忌
对于所有场景ω
TS2 开始




TS2结束,返回ξk当前场景下的成本
重复所有场景,返回ξk的期望成本
找出l∈N(L*),具有最小成本
找出L*∶=l,更新禁忌表1,迭代,再次构建N(L*)
TS1结束
3.1 TS1:第一阶段固定性决策
依据1.2中对船舶的分类,生成优先级列表L,如图4所示.

图4优先级列表L
Fig.4PrioritylistLforvessels
不同类型的船舶,其在TS1中所需的决策不同,因此位于列表的位置不同.
(1)A类:作业已安排,不需要在该阶段决策,因此位于编码列表的最高优先级位置.
(2)B类:其准确到港时间已知,在本阶段需执行固定性决策,因此其位于编码列表的第二优先级位置.
(3)C类:到港时间存在干扰的可能性,在第一阶段不进行决策.因此位于列表的最后.
初始列表L0采用经验式生成方式:以EDD原则排序A类船,随后按照FCFS的原则排序剩余B、C.
在本阶段需要做决策的主要是B类船,因此第一阶段的领域生成方式为对B类船进行单项互换操作,即初始列表L0的基础上随机选取两艘B类船更换其在列表上的位置,生成搜索领域N(L).禁忌对象为上一步移动的互换操作,禁忌次数在上限tabu_max和下限tabu_min间随机生成.循环进行禁忌搜索直至最大循环次数Iter_max.
解码过程中,依照优先级顺序,以首次适应(First Fit)原则,考虑剩余可用泊位位置以及堆场的容量,依次将船舶添加到当前的部分计划中.在解码过程中,B类船会被划分为两类:B0类计划能够在当前决策周期内安排并开始作业(令ui=0);而B1类船无法在该周期内安排作业,将被延迟到下一周期重新决策(令ui=1).对于B0类船来说,在该阶段已经做了固定性的决策,包括其船舶靠泊位置,作业开始时间等关键决策变量,需要在该阶段实际执行,该计划一旦决策,则无法更改.而B1类船由于将被延迟到下一周期重新做决策,因此在该周期B1类船相当于C类船,需进行在各个场景下的第二阶段调整性决策,具体解码过程如下:
TS1:
对于所有L中的船
(1)A类:保留si,ei,bi,fi,gi,并从k点开始继续作业
(2)B类:保留fi,并且在k~k+1之间,寻找最早开始时间s,确定对应的e,g,保证在s~g之间内堆场资源能够满足;以及找到可行且最小的泊位b,若能找到,则令ui=0,si=s,ei=e,bi=b,gi=g,否则ui=1.
(3)C类:跳过
3.2 TS2(ω):第二阶段可调整决策
第二阶段主要基于场景ω对B1及C类船进行调整性预决策.其优先级列表L2(ω)由B1和C类船构成,如图5所示,且基于单项互换操作生成搜索邻域N(ξk+1,ω).

图5场景ω下优先级列表L2(ω)
Fig.5PrioritylistL2(ω)forvesselsinscenarioω
在场景ω下,采用首次适应原则依次按照优先级列表将B1与C类船添加到已有的计划中.在各个场景下补充ξk得到第二阶段的邻域解ξk+1.在本阶段中,B1与C类船的决策量均独立于各场景ω,但均补充自同一个第一阶段固定性决策.第二阶段禁忌的对象仍为上一步移动的操作,禁忌次数在上限tabu_max和下限tabu_min间随机生成.
TS2
对所有场景ω所有L2中的船
(1)B1类,保留fi,从时间k+1找最早开始时间sω,确定对应的eω,gω,保证在s~g之间内堆场资源能够满足,以及找到可行且最小的泊bω.
令si,ω=sω,ei,ω=eω,bi,ω=bω,gi,ω=gω.
(2)C类,保留fi,从Ai,ω开始,寻找最早开始时间sω,确定对应的eω,gω,保证在s~g之间内堆场资源能够满足,以及找到可行且最小的泊位bω.
令si,ω=sω,ei,ω=eω,bi,ω=bω,gi,ω=gω.
4 数值实验
采用Zhang[18]和Zhen[19]研究中的算例用于数值实验测试.将船舶分为三类,包括小船(Feeder)、中船(Medium)、大船(Jumbo),分别占总量的三分之一.假设岸桥资源不构成瓶颈,各船分配的岸桥数取其平均值,大中小船分别设置为2、3、4.5.设置小、中、大三种规模算例,其每周到港船舶数分别为20、30、40,基于Zhen[20]设置不同规模下码头可用资源量.同时考虑到进出口港与转运港运作上存在差异,设置堆场的名义利用率在50%左右,即小、中、大规模下堆场容量分别设置为27 000、39 000、54 000TEU(Twenty foot Equivalent Unit,20英尺标准集装箱);并设置各船的进口箱占比服从均匀分布U[0.2,0.8].
船舶的周期性作业模板已定,且假设每个周期内随机选取发生干扰的船舶占总船舶数量的20%.设定除干扰船舶到港时间存在不确定性,其余船舶准确到港时间已知.通过生成随机到港时间场景体现干扰现象,其延迟时间在[20 h,30 h]内随机选取,且随着时间的接近其准确度越高,不同时间段的到港时间分别与其准确到港时间偏差分布服从均匀分布[-12 h,12 h],[-8 h,8 h],[-4 h,4 h],针对出现的干扰现象,设置场景池,场景池的大小为2 000,每个算例从中选取30个场景(Ω=30)并取其期望值作为目标函数.由于市场需求的不确定性,所有船舶的实际作业时间与模板中的作业时间存在一定偏差,其服从均匀分布[-4 h,4 h].
由于船舶本身的到港具有周期性,在每个周期均会存在部分船舶作业需要延续到下周期,针对这些“跨周期”的船舶,在实际调度过程中需要将其资源考虑到当前周期的资源分配中.在首个决策周期中,将模板中的跨周期船舶设置为虚拟船舶作为A类船,其不参与决策过程,但是在本周期有一定的资源占用.
现设置测试环境如下:
(1)部分后验信息下,考虑周期性模板,以最小化加权偏差为目标函数,采用商用求解软件CPLEX滚动求解近似二阶段优化模型.
(2)干扰环境下,考虑周期性模板,以最小化加权偏差为目标函数,基于随机场景信息,使用动态决策框架,滚动求解二阶段近似优化模型,在各决策周期内采用双层嵌套禁忌搜索.
(3)干扰环境下,不考虑周期性模板,以最小化船舶在港时间为目标函数,使用提出的动态决策框架,滚动求解二阶段近似优化模型,在各决策周期内采用双层嵌套禁忌搜索.
(4)干扰环境下,基于周期性模板,保持泊位位置不变的前提下,以最小化船舶在港时间为目标函数,采用右移策略(right shift)应对干扰事件.
其中由于周期性模版是已知的,因此在数据测试中,小规模的模板由CPLEX求解3 h获得的最优解或者高界.而中大规模由于CPLEX无法获得较理想的可行解,因此,采用确定环境下的简化TS获得.
每组实验均通过10组随机数组进行测试,在C#(Visual Studio 2013)语言环境下编程,测试平台为Intel Xeon E5-1650 v3处理器,3.50GHz主频,16G内存,实验结果见表6.其中“-”表示无法求得可行解.Obj=Δe+Δb0.025;差异=(Obj2-Obj1)/Obj1;改善1=(Obj3-Obj2)/Ob3j;改善2=(Obj4-Obj2)/Obj4.
实验1在部分后验的前提下,已知决策当天及后续3 d的船舶准确到港时间,并采用CPLEX进行滚动求解,在实际中是无法实现的理想情况.在中小规模下能够基本上求得相应最优解,但在大规模CPLEX在某一循环周期中无法在5 h内获得可行解.总的来说运算时间较长,中小规模下平均求解时间分别在150 min、694 min.
实验2在存在干扰的前提下,滚动调用所提出的TS求解二阶段近似优化模型,相比较于实验1在部分后验前提下采用CPLEX滚动求解,中小规模下平均差异均为10%,其差异的差值体现了第二阶段准确信息的价值及重要性,侧面体现抽样场景与真实值之间的差异.由于实验1是基于部分后验信息且采用CPLEX求解精度较高,相比较于实验2的第二阶段采用抽样样本,其10%的差异在可接受范围内.同时由于CPLEX针对各规模的求解时间较长,

表6 数值实验汇总表Tab.6 Results of numerical experiments
实验2在求解质量可接受的前提下提升了求解速度,在各规模下的平均求解时间分别为:0.22 min,1.87 min,18.75 min.同时CPLEX在大规模问题无法在5 h之内滚动求得可行解,体现了所提出求解框架与算法在求解效率上的优势.
为了证明周期性模板在作业执行中的稳定作用,设计实验3进行验证.实验3在不考虑模板的前提下,以作业效率最小化总在港时间为目标,最后将作业计划与模板进行偏差比较,各规模下与实验2的改善分别为14%,4%,8%,显示周期性模板在维持船舶作业稳定性上的作用.分别从时间与空间单角度偏差出发,其各规模平均均比实验2(采用周期性模板)差异值大,两者在各规模下时间偏差值在16%,2%,5%,其空间偏差值分别为30%,24%,24%.无论从整体偏差还是时间空间单角度偏差上均充分体现了考虑周期性模板能够在存在干扰的前提下使作业执行更加稳定.
实验4与实验2基于相同的干扰环境,使用传统的右移策略充分考虑模板,保持泊位位置不变,按照先到先服务的原则对到港船舶安排作业.相比而言,采用动态的决策框架在各规模下的改进分别为42%,41%和43%,体现了动态决策框架在应对干扰事件时的优势性,也体现了第二阶段随机场景信息的重要性.虽然在右移策略下泊位的偏差均为0,但是由于船舶干扰因素主要体现在到港时间及需求市场的不确定性上,倾向性的保证空间上的稳定性会造成时间上存在较大的偏差,这也是两者差距在40%以上的原因之一.
5 总结
针对集装箱进出口码头运作层面,考虑周期性船舶到港时间及市场需求的干扰,采用动态决策框架协同调度泊位堆场资源.通过对信息动态特征分析及船舶分类,同时考虑作业执行的稳定性,以最小化与周期性模板的时间空间加权偏差作为目标函数,提出基于随机过程的二阶段近似优化模型.通过延迟部分决策充分利用准确信息,增加决策的灵活性,同时通过随机场景可调整预决策,使决策更具鲁棒性.依据提出的决策框架及模型,设计双层嵌套禁忌搜索,验证该框架的有效性.
参考文献:
[1] BIERWIRTH C, MEISEL F. A survey of berth allocation and quay crane scheduling problems in container terminals[J]. European Journal of Operational Research, 2010, 202(3):615.
[2] BIERWIRTH C, MEISEL F. A follow-up survey of berth allocation and quay crane scheduling problems in container terminals[J]. European Journal of Operational Research, 2015, 244(3):675.
[3] CARLO H J, VIS I F A, ROODBERGEN K J. Storage yard operations in container terminals: Literature overview, trends, and research directions[J]. Flexible Services & Manufacturing Journal, 2014, 235(2):412.
[4] MOORTHY R, TEO C P. Berth management in container terminal: the template design problem[J]. OR Spectrum, 2006, 28(4): 495.
[5] JIN J G, LEE D H, HU H. Tactical berth and yard template design at container transshipment terminals: A column generation based approach[J]. Transportation Research Part E: Logistics and Transportation Review, 2015, 73:168.
[6] TAO Y, LEE C Y. Joint planning of berth and yard allocation in transshipment terminals using multi-cluster s9tacking strategy[J] Transportation Research Part E: Logistics and Transportation Review,2015, 83:34.
[7] ROBENEK T, UMANG N, BIERLAIRE M,etal. A branch-and-price algorithm to solve the integrated berth allocation and yard assignment problem in bulk ports[J]. European Journal of Operational Research, 2014, 235(2):399.
[8] HENDRIKS M P M, LEFEBER E, UDDING J T. Simultaneous berth allocation and yard planning at tactical level[J]. OR Spectrum, 2013, 35(2):441.
[9] ZENG Q, HU X, WANG W,etal. Disruption management model and its algorithms for berth allocation problem in container terminals[J]. International Journal of Innovative Computing Information & Control: IJICIC, 2011, 7(5):2763.
[10] ZENG Q, YANG Z, HU X. Disruption recovery model for berth and quay crane scheduling in container terminals[J]. Engineering Optimization, 2011, 43(9):967.
[11] LI M Z, JIN J G, LU C X. Real-Time Disruption Recovery for Integrated Berth Allocation and Crane Assignment in Container Terminals[J]. Transportation Research Record Journal of the Transportation Research Board, 2015, 2479:49.
[12] LIU C, ZHENG L, ZHANG C. Behavior perception-based disruption models for berth allocation and quay crane assignment problems[J]. Computers & Industrial Engineering, 2016, 97:258.
[13] GUI J, YANG C. A Human-computer Interaction-based neighborhood search heuristic for disruption management[C]∥Third International Conference on Intelligent System Design and Engineering Applications. [S.l.]: IEEE, 2013:77-80.
[14] LI Q, TONG S, YANG C,etal. Optimization of operation scheme of container terminal based on disruption management[C]∥International Conference on Transportation Engineering. [S.l.]: 2009:3477-3482.
[15] UMANG N, BIERLAIRE M. Disruption management and re-scheduling in Berth allocation problem in Bulk Ports[R]. [S.l.]: Ecole Polytechnique Federale de Laussane, 2012.
[16] UMANG N, BIERLAIRE M, ERERA A L. Real-time management of berth allocation with stochastic arrival and handling times[J]. Journal of Scheduling, 2017, 20(1):67.
[17] ZHANG G, SMILOWITZ K, ERERA A. Dynamic planning for urban drayage operations[J]. Transportation Research Part E: Logistics and Transportation Review, 2011, 47(5):764.
[18] ZHANG C, LIU J, WAN Y W,etal. Storage space allocation in container terminals[J]. Transportation Research Part B Methodological, 2003, 37(10):883.
[19] ZHEN L, CHEW E P, LEE L H. An integrated model for Berth template and Yard template planning in transishipment Hubs[J]. Transportation Science, 2011, 45(4):483.
