基于虚拟样机技术的外骨骼助力搬运机器人结构设计与仿真研究
2018-05-02刘会霞陈树洋
高 坤,刘会霞,陈树洋,王 霄
(江苏大学 机械工程学院,江苏 镇江 212013)
0 引 言
由于外骨骼搬运机器人可以穿戴在人体上[1],且对不同的工作环境具有较好的适应性,被认为是一种较好的辅助人体完成体力工作的器械。在国外,针对外骨骼助力机器人研究较早,如美国洛克希德·马丁公司研制的HULC外骨骼机器人[2]、美国雷神公司的XOS2机器人[3]、日本筑波大学研制的HAL外骨骼机器人[4]。近年来,欧洲太空总署研制的上肢助力机器人[5]、日本东京大学的可穿戴机器人等[6],物都可以较好地辅助人体搬动远远大于自身力量的重量。但这些机器人结构大都较为复杂,且价格昂贵。目前,国内外骨骼机器人,主要针对的是日常行动不方便的人群,且主要集中于外骨骼下肢[7-8],因此有必要设计一款结构相对简单,价格较为便宜,适用于普通劳动者需求的外骨骼助力搬运机器人。
针对上述问题,本文将基于虚拟样机技术,设计一款结构较为简单,方便人体穿戴的外骨骼助力搬运机器人。
1 外骨骼助力搬运机器人结构设计
1.1 人体动作分析
外骨骼助力搬运机器人主要是辅助穿戴者完成搬运动作,所以在进行外骨骼助力搬运机器人结构设计时,主要考虑的是完成搬运动作时人体主要的受力特点,在此分析的基础上对外骨骼助力搬运机器人进行结构设计。查阅相关人体运动学文献[9],人体在搬运货物时,人体主要的受力关节为髋关节与肩关节,人体在抬起货物后,人体主要起到对重物的支撑作用,最主要的支撑关节为人体的肘关节。人体搬运动作示意图如图1所示。
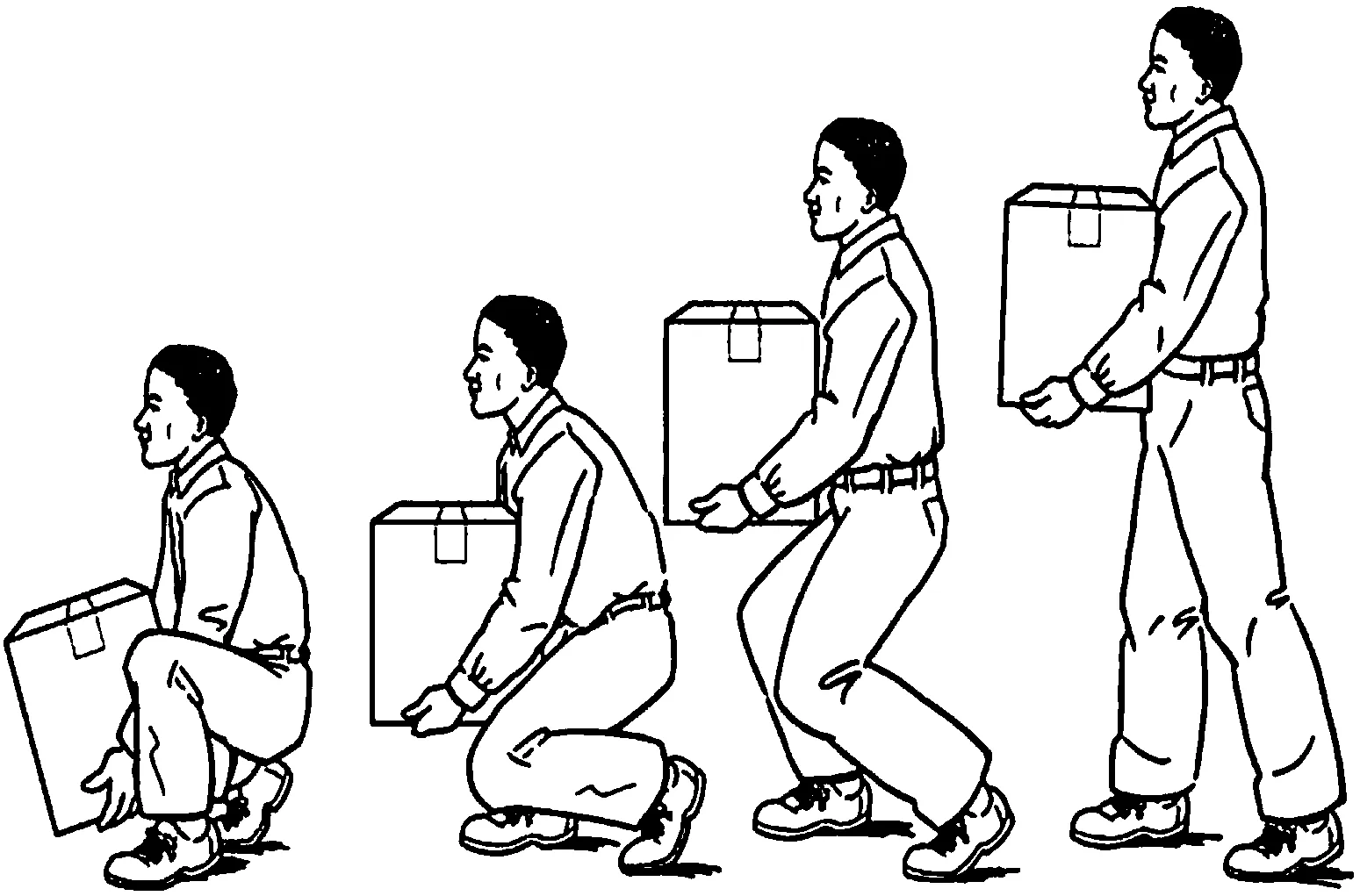
图1 人体搬运动作示意图
1.2 整体结构设计
本文所设计的外骨骼助力搬运机器人主要包括安装在髋关节与肩关节上的驱动装置,外骨骼四肢及安装外骨骼肘关节上的自锁结构。结构如图2所示。

图2 外骨骼助力搬运机器人结构
人体搬运重物的过程中,人体主要的受力关节为人体的髋关节及肩关节。根据上述分析,驱动装置应该安装在外骨骼机器人的髋关节与肩关节处,肩关节驱动装置与髋关节驱动装置的内部结构一致。
驱动装置结构示意图如图3所示。

图3 驱动装置结构示意图
正常搬运重物过程中,人体搬起货物后,人体的主要受力来自于重物的重力,要减轻重物的重力对人体的影响,将外骨骼的肘关节设计为自锁机构。当搬起重物后,外骨骼肘关节自锁,此时重物的重力通过外骨骼上臂传递到外骨骼下肢与外骨骼鞋,此时重物完全由外骨骼来支撑。
1.3 驱动装置结构设计
外骨骼机器人的动力输出装置主要有液压驱动与电机驱动,由于液压驱动相对电机驱动运动方式较为笨重,液压缸也不适合安装于具有较多自由度的外骨骼上,外骨骼助力搬运机器人采用电机驱动。考虑到外骨骼机器人需要工作在不同的环境中,电机选择MaxonEC90盘式电机。考虑到外骨骼机器人的结构特点,驱动装置中的减速器选择谐波减速器。驱动装置中的增量式编码器与绝对式编码器分别用来检测电机转动的角度与人体关节运动的角度。
1.4 肘关节自锁结构设计
人体上肢在支撑重物时,外骨骼肘关节主要的弯曲角度为90°~180°,所以外骨骼肘关节的自锁角度需要设计为与人体上肢支撑重物时的角度相同,肘关节自锁结构如图4所示。

图4 肘关节自锁结构
初始位置时关节夹角为180°,由初始位置到关节夹角为90°的过程中,两个带齿止动块受到弹簧片一定的弹力,外部链接件上的齿被带齿止动块卡主,所以肘关节上的链接件只能向肘关节角度减小的方向运动,向反方向运动时引发自锁。当外骨骼肘关节运动到夹角为90°时,链接件上的凸点拨动拨片的突出部分,使带齿止动块上的齿与链接件上的齿分离,使得肘关节自锁结构可以恢复到初始状态。
2 机器人下肢运动学分析
针对所建立的外骨骼机器人的模型,其运动学分析主要是针对外骨骼下肢。
构造外骨骼助力搬运机器人的运动学模型,根据D-H法建立外骨骼助力搬运机器人下肢的D-H坐标系如图5所示[10]。

图5 外骨骼机器人下肢D-H坐标系
按照D-H矩阵参数的定义方法,得到的参数值如表1所示。
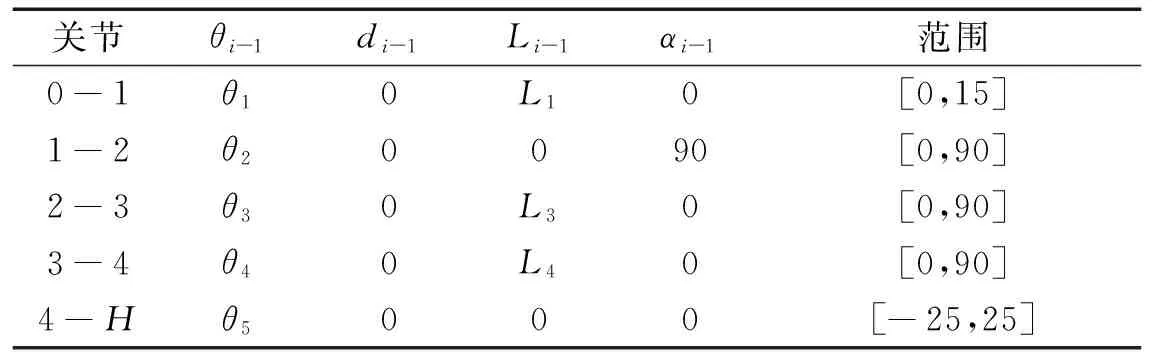
表1 外骨骼助力搬运机器人下肢D-H参数表/(°)
2.1 运动学正解
本研究将上述外骨骼助力搬运机器人下肢D-H参数表带入到齐次变换矩阵公式,可求得各连杆变换矩阵如下:
(1)
外骨骼助力搬运机器人的下肢运动学矩阵为:
(2)
其中:
r11=C345C12,r21=C345S12,r31=S345;
r12=-C345C12,r22=-S345S12,r32=C345;
r13=S12,r23=-C12,r33=0;
px=L1C1+L4C12C34+L3C12C3;
py=L1S1+L4C34S12+L3S12C3;
py=L4S34+L3S3;
Si=sinθi,Ci=cosθi,Sij=sin(θi+θj),Cij=cos(θi+θj)。
为验证运动学正解的方程是正确的,代入一组已知位置的关节角度值。现将初始位置坐标θ1=0,θ2=π/2,θ3=0,θ4=0,θ5=0代入后得:px=a1,py=a3+a4,pz=0。
得到的关节末端位置值与已知的相同,可以验证运动学正解的正确性。
2.2 运动学逆解
运动学逆解就是在已知系统末端位姿时,求解系统各个关节的角度变量。使用齐次矩阵逆变换左乘或右乘运动学方程,将各个关节变量分离出来,进行求解各个关节变量的值。
对式(2)两边同时右乘4TH的逆可得:
(3)
式(3)两边元素(1,1)对应相等得:
对式(3)两边同时右乘3T4的逆可得:
(4)
式(4)两边的元素(3,4)相等得:
对式(1)两边同时左乘0T1的逆:
(5)
式(5)两边的元素(3,1)与(3,2)对应相等得:
并由式(5)两边的元素(1,4)对应相等得:

为验证逆运动学解的正确性,将外骨骼机器人的如图5所示的以下初始位姿:
代入到所求得的运动学逆解当中,求得各关节的角度为:θ1=0,θ2=π/2,θ3=0,θ4=0,θ5=0,与已知的实际关节角度相符,验证上面所求逆解的正确性。
通过对机器人的正运动学分析,在已知下肢尺寸及关节角度的情况下,获得末端的位姿;通过逆运动学分析,可以在已知末端位姿的情况下,获得各关节的角度。
3 步态动作仿真及联合控制仿真
为了验证外骨骼助力搬运机器人在搬起重物后步态行走时的稳定性,本研究利用基于ADAMS的虚拟样机技术对外骨骼助力搬运机器人进行下肢步态动作的仿真分析。进行步态仿真时,需要获得人体在行走过程中下肢各关节的数据,数据获取思路是,采用人体运动捕捉系统,主要测量人体下肢行走过程中关节角度值,将测得髋关节、膝关节与踝关节的实验数据作为外骨骼助力机器人行走运动时的关节数据,具体数据参考文献[11-12]。并基于ADAMS与Matlab对机器人模型采用PID控制算法,对其进行了联合控制仿真。
3.1 外骨骼模型的导入
本研究将在三维设计软件Creo中建立的三维模型保存为Parasolid格式,以便于在ADAMS中打开。模型在ADAMS中打开后,对所设计的模型施加约束,添加材料,施加外骨骼脚与地面的接触。将所测得的步态实验数据在ADAMS中以TestData形式导入ADAMS中。最后对关节添加驱动,驱动函数的格式为STEP(time,102,1,102.01,0)*AKISPL(time,0,SPLINE_d,0)*1d,SPLINE_d为通过实验所获得的人体相应关节的步态数据。
在ADAMS中的步态仿真效果如图6所示。

图6 步态仿真效果
为验证所做步态仿真结果的可靠性,笔者通过分别检测步态仿真过程中外骨骼下肢的末端位置曲线,以及下肢各关节的髋、膝、踝关节角速度与角加速度,并与人体CGA步态数据库的相关数据进行比较,以此说明外骨骼下肢步态仿真的可靠性,进而说明结构设计的可靠性。
3.2 运动学仿真结果与分析
在人体步态实际行走时,人脚落地的整个过程中,首先是脚跟着地然后是脚尖着地,所以末端脚位移曲线在地面垂直面上有两个波峰,第一个为脚跟着地,第二个为脚尖着地,下肢末端位置如图7所示。

图7 末端位置曲线
其所显示的为两个步态周期中的数据,第一个步态周期与第二个步态周期曲线中的数据基本一致,这与人体的实际步态运动情况相符。每一个步态周期的过程中都有两个波峰,第一个代表脚跟着地,第二个代表脚尖着地,这与人体的CGA步态数据库中的数据相一致。
髋、膝、踝关节的角加速度曲线在0 deg·s-2~0.85 deg·s-2范围内波动,波动范围小,运行平稳,关节角加速度如图8所示。
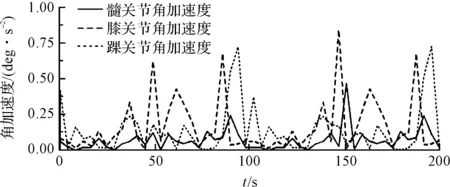
图8 髋、膝、踝关节角加速度图
并与CGA人体步态数据库中的数据相比较,运动趋势与仿真数据基本一致,验证了所做下肢各关节加速度曲线的准确性。
3.3 联合控制仿真模型的建立
基于导入的虚拟样机模型建立联合仿真时的控制模型,其所控制的变量是虚拟样机模型中的下肢膝关节与髋关节扭矩。本研究在ADAMS中分别定义输入状态变量与输出状态变量,并将输入状态变量定义为扭矩,输出状态变量定义为所控制关节的角速度与角度[13]。输入输出状态变量定义完成之后,在ADAMS中导出控制参数。
导出的控制控制参数在MATLAB中打开,将adams_sub拖动到MATLAB/Simulink当中。采用PID控制方式,在Simulink中建立所示的PID控制方案如图9所示。

图9 联合仿真控制图
本研究通过不断调整PID控制中的比例增益、积分增益与微分增益来使期望的关节角度曲线与实际响应的关节角度虚线不断接近。
3.4 联合仿真结果分析
外骨骼助力搬运机器人在步态行走过程中需要有较好的响应特性与跟随特性,由于调整PID参数时,各关节调整步骤基本相同,所以只选择外骨骼左腿膝关节进行了响应特性与跟随特性的分析。
随后对联合仿真控制模型中的左腿膝关节进行了跟随特性的分析仿真结果如图10所示。

图10 跟随特性曲线
其中所施加的初始信号为正弦信号,通过不断调整PID参数,使响应曲线不断逼近如图7所示的期望曲线仿真结果。响应曲线可以较好地跟随正弦信号波动而波动,符合初始设计的要求。在ADAMS中也可以实时的显示出左腿膝关节的运动情况。
4 结束语
本文设计了一款结构相对简单,适用于普通劳动者需求的外骨骼助力搬运机器人,并针对所设计的结构,对外骨骼助力搬运机器人下肢进行了正逆运动学分析,得到了其运动学分析结果;基于ADMAS的虚拟样机技术,对其下肢进行了步态仿真及联合控制仿真。
步态仿真结果表明:其步态运动情况符合人体的实际运动情况;联合控制仿真结果显示,所设计的外骨骼机器人有较好的响应特性与跟随特性。上述分析可为今后样机的试制打下基础。
参考文献(References):
[1] 柴 虎,侍才洪,王贺燕,等.外骨骼机器人的研究发展[J].医疗卫生装备,2013,34(4):81-84.
[2] Word Scientific Publishing Company. Foreword[J].InternationalJournalofHumanoidRobotics,2009,6(3):329-335.
[3] MCHALE J. Exoskeleton technology reduces soldier fatigue and injury[J].Military&AerospaceElectronics,2009,20(6):6.
[4] TSUKAHARA A, KAWANISHI R, HASEGAWA Y, et al. Sit-to-stand and stand-to-sit transfer support for complete paraplegic patients with robot suit HAL[J].AdvancedRobotics,2010,24(11):1615-1638.
[5] GEMIGNANI J, GHEYSENS T, SUMMERER L. Beyond astronaut's capabilities: the current state of the art[C]. Engineering in Medicine & Biology Society, 37th International Comference of the IEEE, Milan: IEEE,2015.
[6] NWE Y Y, TOYAMA S, AKAGAWA M. Workload assessment with ovako working posture analysis system (OWAS) in Japanese vineyards with focus on pruning and berry thinning operations[J].Journal-JapaneseSocietyforHorticulturalScience,2012,81(4):320-326.
[7] 宁 萌,罗 超,马泽峰,等.一种下肢外骨骼助行康复机器人及康复评价方法[J].机械科学与技术,2017,36(5):697-703.
[8] 李纬华,孙洪颖.下肢康复机器人人机运动分析及仿真研究[J].机电工程技术,2016,45(8):24-27.
[9] 陈斐然,黄德寅,张 倩,等.手工搬运作业人体工效学评价方法实例应用[J].中国工业医学杂志,2014(2):83-86.
[10] 于丰博,杨惠忠,卿兆波.基于D-H参数法的二自由度并联机械手逆运动学求解[J].制造业自动化,2015,37(22):10-13.
[11] 尹军茂.穿戴式下肢外骨骼机构分析与设计[D].北京:北京工业大学机械工程与应用电子技术学院,2010.
[12] 孙明艳,胡 军,刘有海,等.穿戴式下肢外骨骼机器人的结构设计与仿真[J].机械,2016(1):43-46.
[13] 叶仁平,曾德怀.基于Adams和Matlab的机器人手臂运动控制联合仿真研究[J].现代制造工程,2017(6):56-61.
