海面波动引起的声场起伏特性研究
2018-04-27王振马晓民洪常委
王振 马晓民 洪常委
(1.第七一五研究所,杭州,310023;2.上海船舶电子设备研究所,上海,201108)
海面波动具有波长从毫米到百米的连续谱,一般来说,当信号被海面反射时会使声信号强度产生强烈的起伏,这种起伏主要与反射声束的幅度和相位起伏联系在一起[1]。海面波动引起接收信号强度的起伏,还与声源与接收点的距离、海况、散射、折射等有关。信号强度的起伏主要由声源和接收器附近的海面波动引起,而远离声源与接收器的传播路径之间的海面波动对声场的影响较小[2]。海面波动造成不同深度声源的幅度和相位起伏特征,以及声场起伏频率特性,可以辅助提高水下目标的检测性能,作为水下声信号的识别特征。
本文主要研究浅海海面波动引起的声场振幅和相位起伏。基于简正波理论模型,分析海面波动引起声场起伏的因素,针对浅海波导环境,对声源在不同深度下起伏特性进行研究。
1 浅海波导声场模型
典型浅海Pekeris波导环境如图1所示。图中,海面为压力释放表面,海面波动服从均值为μ、方差σ的高斯分布,声源辐射单频信号,海深为H=h1+h(r),声源深度为zs,接收点深度为z,声源与接收点之间的水平距离为rs,水层的密度为ρ0=1 000 kg/m3,声速为c0=1 480 m/s,海底层的密度为ρ1=1 800 kg/m3,声速为c1=1 550 m/s。

图1 浅海波导环境示意图
由于严重的衰减,侧面波在远场的贡献可以忽略不计,因此,浅海中声源在远场接收点处的复声压场可以表示成一系列简正波叠加的形式[3]:
其中,φm(z )为特征函数,κm表示水平波数,ω为声源的角频率,M为声源激发的简正模阶数。
其中,mγ是垂直波数,带‘—’符号为海面平整的波数。由公式(4)得:


其中h(r)为海面波动高度。由二项式定理及概率密度传递函数[4]得水平波数波动值mε:
海面波动波高方差为σ。由公式(1)知,相位波动与传播路径有关,第 m阶简正波相位因子表示为为相位因子的波动值,即

由公式(1)知,声场相位起伏波动会由相位因子κmr决定,公式(8)中,相位因子的变化Δφm不仅与海面波动有关,还依赖于声场传播距离。声场幅值起伏取决与模深度函数φ m ( zs ),其波动因子声源深度 zs变化 h (r) ≫ εm,故声场振幅波动主要取决于声源附近海面波动的起伏。
2 海面波动产生的总声场起伏
海面波动造成海洋深度以及声源深度变化,海面扰动参数是垂直距离及水平距离随时间变化的随机函数。为简单起见,本文只研究海洋垂直方向深度扰动[5]。在研究海洋声场起伏中,文献[6]利用声信号强度的波动指数 η表示声场起伏大小( η=〈I2〉/〈I〉2-1,表示平均,I为声信号强度),无波动时为零。为了探究海面波动产生的声场起伏,本节分三种总声场起伏情况进行分析。海洋深度100 m、水平距离1 km,其它海洋环境信息与上节相同:(1)单一频率80 Hz声源、声源深度为10 m仿真结果见图2(a);(2)单一频率80 Hz声源、声源深度为60 m,仿真结果见图2(b);(3)两个频率均为80 Hz声源,声源深度分别为10 m及60 m仿真结果见图2(c)。总声场起伏强度利用蒙特卡洛仿真实验,重复进行100次不同深度海面波动试验,取试验均值。海面波动参数均服从均值为0、方差为4的高斯分布。由图2(a) 、2(b)可以看出,近海面声源的声场起伏强度明显大于远离海面声源起伏强度。由图2(c)知,当同时存在较深声源与近海面声源时,总声场的起伏强度会减弱,介于两者单一声源之间。由海面波动引起深度变化导致的声场起伏,可以简单解释为[7]:当声源的深度非常小时,由简正波理论知γmzs≪π/2,模深度函数φ(zs)=sin(γmzs)≈γmzs,与 zs成比例,当声源深度 zs→0时,声压振幅趋近于零。因此海面波动会造成近海面声源的声场剧烈起伏。
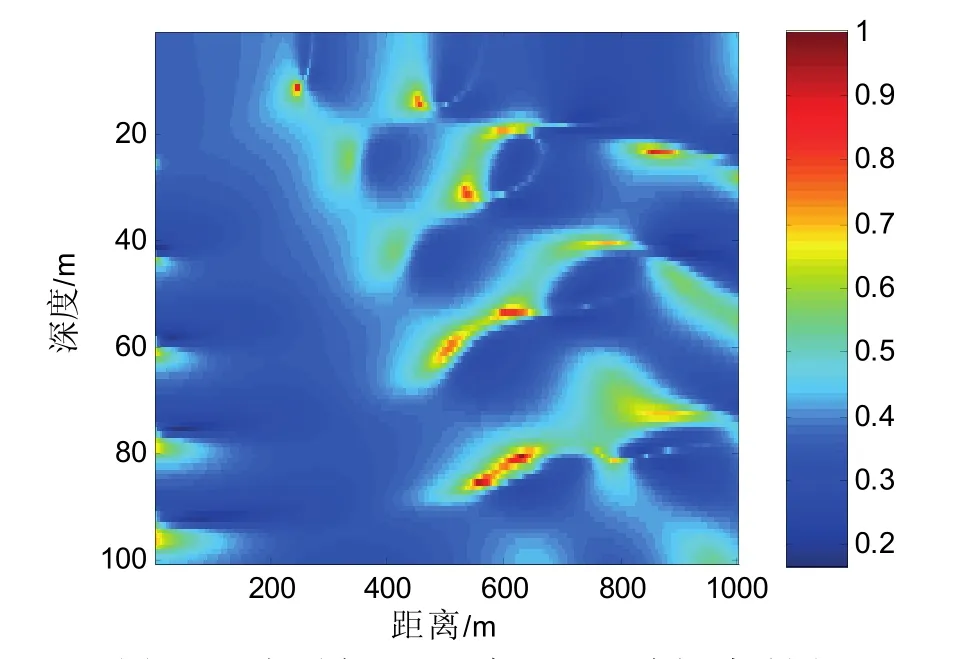
图2 (a) 水面声源(深度10 m)声场波动图
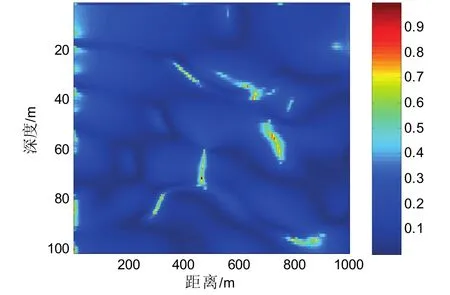
图2 (b) 水面声源(深度60 m)声场波动图

图2 (c) 两种声源(深度10 m、60 m)声场波动
3 不同海深声场能量起伏特性
探究相同海面波动条件下,声场起伏对不同海洋深度的依赖特性。基于单点接收简正波理论单点接收处声场起伏强度[3],开展仿真实验,分析不同海深、不同声源深度的起伏波动。假定水平距离2 km的108 Hz声源分别处于3种海洋深度状况下 :(1)海洋深度30 m,声源深度变化为1~29 m,接收点深度为29 m;(2)海洋深度70 m,声源深度变化为1~68 m,接收点深度69 m;(3)海洋深度100 m,声源变化深度为1~98 m,接收点深度99 m。三种海洋深度的海面波动状况均服从均值为0、方差为4的高斯分布,基于简正波模型探究不同海洋深度声场起伏特性。重复进行100次蒙特卡洛仿真实验,按照信号强度波动指数公式计算不同海洋深度声场起伏强度,分别取其平均值,得到不同海洋深度条件下声场起伏如图3所示。
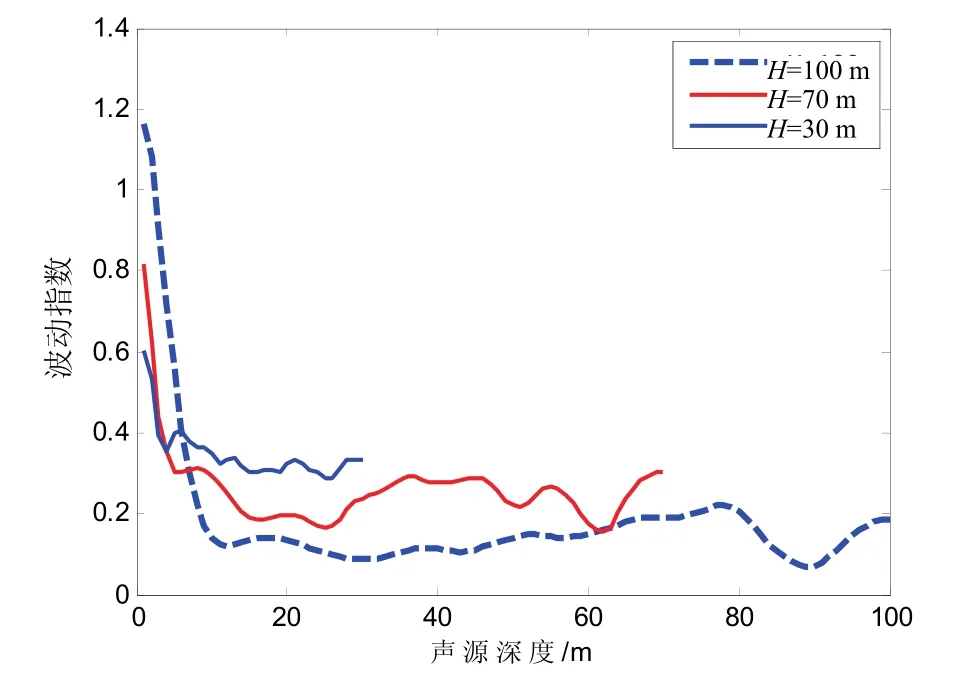
图3 波动指数对海深的依赖特性
从图3可以看出,近海面声源声场波动值明显比远离海面声源的波动指数高,声源深度7~10 m为声场波动剧烈程度划分范围[8],声源深度小于这一范围时,声场波动剧烈;声源深度大于这一范围时,声场波动程度减弱。这一声源深度特性可以用来分辨表面声源与水下声源。100 m海洋深度时,近海面声源声场波动值约为远离海面声源波动指数的 4~5倍;随着海洋深度的减小,远离海面声源的波动值增大,近海面声源的波动值减小,两者之间的波动值差距在减弱。公式(7)可以解释这一现象:随海洋深度的减小,计算的波动值会增大,引起模深度函数波动,导致公式(1)计算的声压起伏强度增加。
探究不同海洋深度频率和简正波模态的深度依赖性关系。在低频范围内,可只限于两个简正波,考虑简正波阶数 m=2时的起伏强度。仿真条件:(1)海洋深度为100 m,声源深度为60 m,声源的频率变化范围为60~110 Hz;(2)海洋深度为70 m,声源深度为40 m,声源的频率变化范围为60~110 Hz。接收距离为4 km分析模式2的频率深度函数波动特性。海面波动状况均服从均值为0、方差 为4的高斯分布,重复进行100次蒙特卡洛仿真实验,取其均值。仿真1的处理结果见图4(a) ,仿真2的处理结果见图4(b)。图4(a)中,声源深度60 m处,水平亮带显示较高的波动数值,该亮带与声源的深度位置相对应。由图4可知其它深度位置模态波动强度较小,显示出微弱的频率依赖性。
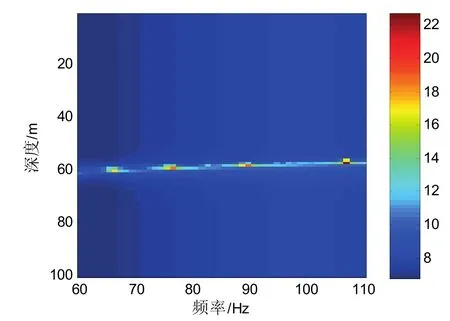
图4 (a) 100 m海深信号频率的深度依赖特性
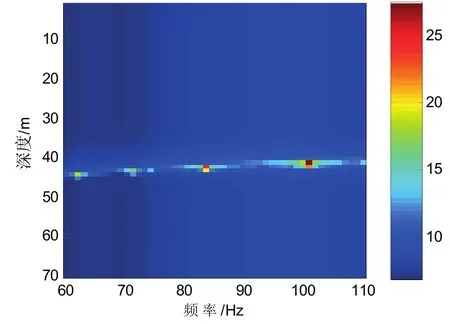
图4 (b) 70 m海深信号频率的深度依赖特性
4 海面波动引起的声场相位起伏特性
为了探究海面波动对声场相位起伏的影响,本节假定海洋深度100 m,水平距离1 000 m,海面波动服从均值为0、方差为4的高斯分布。环境参数与前面假设一致,重复100次蒙特卡洛仿真实验,计算声场相位波动方差,取其均值,声源频率80 Hz深度分别为10 m,如图5(a),声源深度为60 m,如图5(b)。图中,近海面声源相位波动方差大于远离海面声源相位波动。声场相位的波动方差与传播距离有很大关系,在水平距离方向,相位波动方差在传播距离方向具有规律性的条纹变化。从公式(8)看出海面波动对声场的相位造成的影响:相位波动因子依赖于水平传播距离。

图5 (a) 水下声源(10 m)相位波动特征
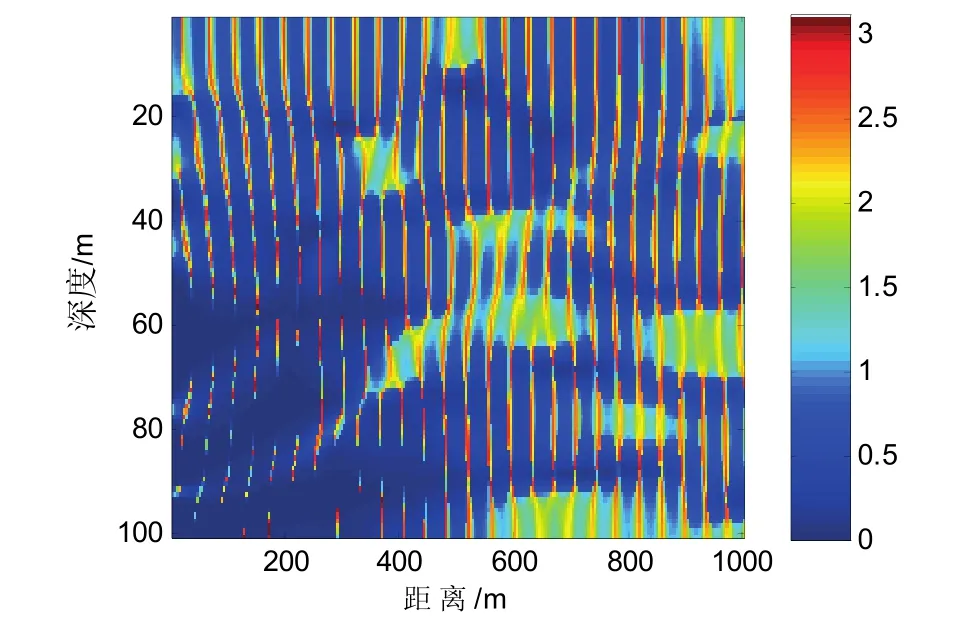
图5 (b) 水下声源(60 m)相位波动特征
5 验证仿真分析
应用单点接收简正波理论,进行仿真实验。仿真条件为:表面声源深度7 m,水下声源深度50 m,声源的频率均为108 Hz,单接收点接收距离4 km,接收深度98 m,海深100 m,其它海洋条件与2~4节相同。图6(a)为接收点处声场的波动指数η,由公式 η=〈 I2〉/〈I〉2-1 计算得到。红线为深度 5 m 处声源的波动,蓝线为声源深度50 m处声场波动,两者比较可知近表面声源的波动强度大于远离海面声源的波动强度。以复声压real(P)及imag(P)计算相位[10],图6(b)为50 m声源的相位图,图6(c)为5 m处声源的相位图。两者比较可知,远离海面声源相位具有规律性,起伏较小,近海面声源的相位起伏较大。
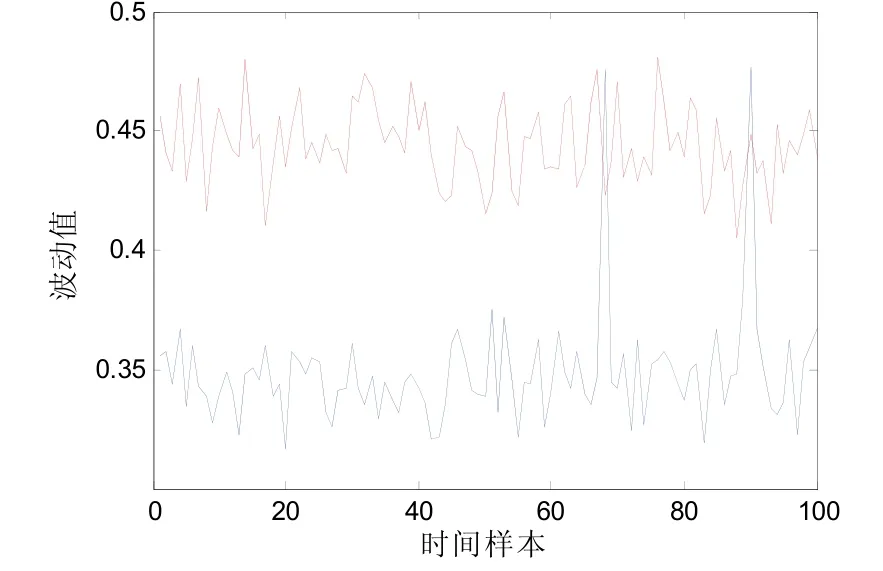
图6 (a) 单点接收声压的波动指数
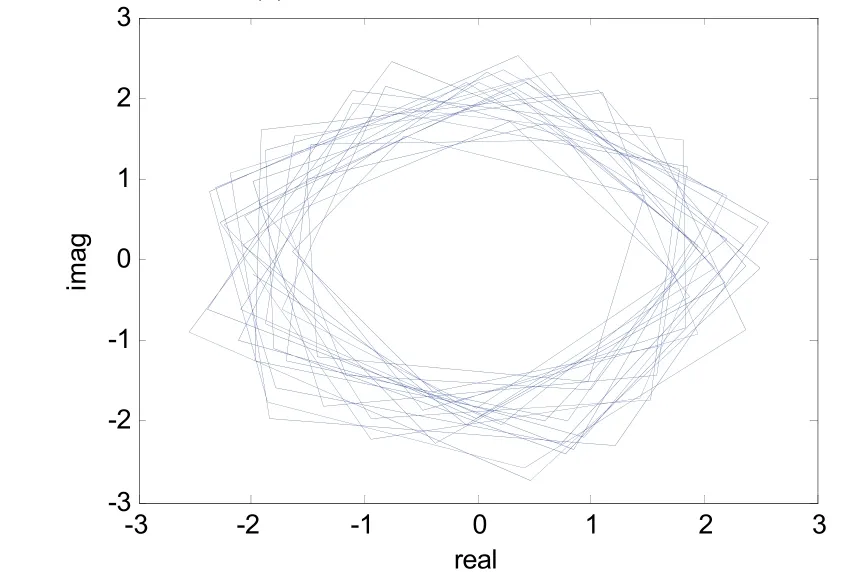
图6 (b) 单点接收相位图(声源深度60 m)

图6 (c) 单点接收相位图(声源深度10 m)
6 结论
浅海波导环境中,数值模拟和理论分析表明:(1)海面波动导致深度函数φm(zs, r)发生变化,声压振幅也起伏波动,近海面声源的声场波动远大于远离海面(水下声源)声场的起伏强度;(2)不同海洋深度环境下,声场的起伏强度是不同的,随海洋深度减小,声场的起伏强度增大;(3)海面波动造成海洋深度变化,引起水平波数 κm(r)发生变化,形成声场相位的起伏波动,相位的起伏依赖于声场传播距离,形成规律性的条纹变化。声场的振幅相位起伏波动特性,可以为水声信号处理提供一种新思路。
参考文献:
[1] GORDIENKO V A,Jia Zhifu. Vector Phase Methods in Acoustics[M]. National Defencse Industry Press With permission, 2014:.84.
[2]SCRIMGER J A. Signal amplitude and phase fluctuation induced by surface waves in ducted sound propagation[J].JASA, 1961, 33(2):239-247.
[3] JENSEN F, KUPERMAN W, PORTER M, et al.Computational ocean acoustics[M]. 2nd. Springer, 2011.
[4] LEE Y W. Statistical theory of communication[M].JohnWiley,1960:190.
[5]恽宗杨. 在波导中换能器随机摇摆对声场起伏的影响[J].声学学报, 1965, 2(3):34-38.
[6] CLAY C S,WANG Y, SHANG E C. Sound field fluctuations in a shallow water waveguide[J]. JASA, 1985,77(2):424-428.
[7] JACOB GEORGE. Shallow water passive acoustic detection using normal modal components in fluctuation processing [J]. JASA, 1996, 99(6):3439-3444.
[8] GEORGE J. Physical mechanisms to explain the observed features of ambient noise in shallow water [J]. JASA, 1996,99(6):3439-3444.
[9] 谢志诚,葛辉良. 水面和水下目标起伏声场差异性研究[J].声学与电子工程, 2015(1):24-29.
[10] 周建波,朴胜春,刘亚琴,等. 海面随机起伏对噪声场空间特性的影响规律[J]. 物理学报,2017,66(1):121-131.
[11]李启虎.相位谱的快速近似计算法[J].应用声学,1984(2):44-45.
[12] 杜金燕,孙超. 典型浅海声场环境中的简正波估计[J].声学技术, 2009,28(6):719-724.
[13] KATSNELSON B, PETNIKOV V, LYNCH J.Fundamentals of shallow water acoustics[J]. Underwater Acoustics.2012:145- 191.
