大孔径拖线阵阵形畸变问题分析与校正方法研究
2018-04-27鲁赫马启明周利生
鲁赫 马启明 周利生
(第七一五研究所,杭州,310023)
拖曳线列阵声呐相较于一般舰壳声呐,有以下优点:不受平台安装尺寸的限制,具有较大的阵孔径;可以远离平台拖曳,受平台自噪声影响较小;较低的工作频率,使得拖曳线阵拥有较远的探测能力。但是拖曳线阵的缺点也十分明显,在舰船拖曳时,拖线阵易引起阵形畸变,精确的阵形姿态难以获得,极大地影响了大孔径拖曳线阵的性能。
纵观现有文献和报告,阵形畸变是影响线阵性能的一个重要因素[1]。因此,阵形估计变成了提高线阵性能的一个重要方法。其中,较为可靠的是非声学方法,主要有两种:利用流体力学方法进行阵形估计[2],另一种则是航向/深度等非声传感器量值拟合方式进行阵形估计[3]。前者将线阵等效为理想运动模型;后者利用传感器的量测值对阵形进行估计,因此在工程上更具有实践价值。
本文基于远场平面波假设,利用均匀直线阵(Uniform Linear Array, ULA)的常规波束形成器(Conventional Beam Forming,CBF)和导向最小方差波束形成器(STeered Minimum Variance,STMV)两种算法,分析了阵形畸变对于不同波束形成器波束响应的影响,提出一种基于航向信息的阵形估计方法,并通过程序仿真和海试数据处理验证了阵形畸变对于CBF和STMV的影响[4-5],并证明本文所述阵形估计方法可以有效补偿阵形畸变误差,能有效提高算法的探测性能。
1 波束形成原理
波束形成是声呐阵列信号处理的主要组成部分,无论是主动声呐还是被动声呐都装备有波束形成系统。将一组传感器(水听器)按一定方式布置在空间不同位置形成传感器阵列,波束形成就是利用传感器阵列输出,根据信号相干叠加而增强,非相干叠加而减弱的原理实现的。根据阵列权值选择方式的不同,可分为数据独立的波束形成器和统计最优波束形成器。对于数据独立的波束形成器,即CBF,其目的在于选取适当的阵列权值矢量以补偿目标信号在各通道上的传播时延,使期望方向上的信号同相叠加,从而在该方向上产生空间响应极大值。相较于CBF,STMW具有更优的强干扰抑制和多目标分辨能力,在某些噪声背景下(空间色噪声),具有更优的弱信号检测能力。
2 阵形畸变对波束形成的影响
图1中,假设均匀直线阵是由N个无指向性的水听器组成,在理想条件下,第i路水听器接收到的信号为 s(t +τi(θ))。τi(θ)为第i路信号相对参考点的时延差。

图1 均匀线阵结构示意图
在实际情况中,水听器位置相较于理想位置会发生偏移,产生一个新的随机时延τj,即第i路水听器接受到的实际信号为 s(t +τi( θ) + τj)。那么波束形成主瓣输出为

假设信号从正横方向入射,即τi=0,那么

如果为理想直线阵,则τj=0,得出理想情况下但是在非理想情况下,τj≠0,根据互相关原理,将等式(1)变为

又因为
综上所述,

假设信号频率为f=500 Hz,那么其相关函数为cos(2πfτ),其中 τ =τi- τj,如果阵畸变较小或者孔径较小,那么它的τ就很小,则D0的损失也较小。例如假设τ=10 µs时,相关函数可以看作:

那么主瓣响应下降较小,阵形畸变对于整体性能影响也较小。但是,如果阵畸变较大并且孔径较大的话,那么它的τ就很大,所以主瓣输出幅度损失较大。同理可知,由于水听器位置随机分布,导致了到达角计算出现误差,使得目标方位求解有较大的偏差。
由此可见,阵形畸变不仅对大孔径拖曳线阵的检测性能有影响,而且对于线阵的方位估计性能有影响。因此阵形畸变是影响大孔径拖曳线阵声呐性能的主要因素之一,而研究阵形估计技术亦是提高声呐性能的有效途径之一。
3 阵形估计方法
本方法利用预先布置在阵中一定数量的航向传感器所量测出的航向信息,通过线性函数插值估计的方法,进行阵形估计。假设线列阵在水下不能拉伸,航向传感器之间的间距固定不变,航向传感器均能准确测得航向角。在长度为L的拖曳线阵中,均匀布置了N个航向传感器,位置如图2所示。

图2 期望阵形
由于微元较小,因此均可被看作一小三角形,所以有
在完成一次计算后,将(x1, y1)替换掉 (x0, y0),得到迭代公式为
在计算n次后,就可以得出第一个区间的估计阵形。一个区间计算完成后,将首节点替换为下一区间首节点,重复上述步骤,完成全阵的阵形估计。
不难看出,本文所述阵形估计方法由于利用的传感器信息更多,因此相较于通过平台航向信息进行估计的非声学方法,其估计精度更高。
4 仿真及数据分析
4.1 计算机仿真
仿真条件:256元直线阵,阵间距为1.2 m,接收信号为单频信号,频率为625 Hz,到达角为60°,水中声速为1 500 m/s,直线阵等间距布置了10个航向传感器,每个航向传感器均能准确测得航向角。在本仿真中,航向角利用航向传感器所处位置的导数的反正切得出。畸变阵形根据函数y=Asin(αx)eβx(式中参数α、β的意义是调整所设线阵的弯曲弧度,在仿真中保持不变)得出,通过控制A调节阵形的畸变程度。从图4中不难看出,所假设的直线阵阵形畸变明显,如果依然利用理想直线作为驾驶向量的相位补偿模型,那么就会发生阵形失配,波束形成出现较大误差。
图3和图4中,在阵形畸变的状态下,利用理想直线阵形模型,CBF的波束主瓣出现展宽,算法分辨力下降;而对于STMV这种高分辨力的自适应算法,阵形畸变对其的影响尤为明显,基本上算法已经失去了检测能力,难以发现目标。另外通过观察可以发现,畸变阵形在CBF主瓣展宽的同时,算法对于到达角的估计也出现了偏移,综合考虑这些问题,从图4可以看出畸变阵形对于声呐性能的影响十分巨大,性能下降明显。
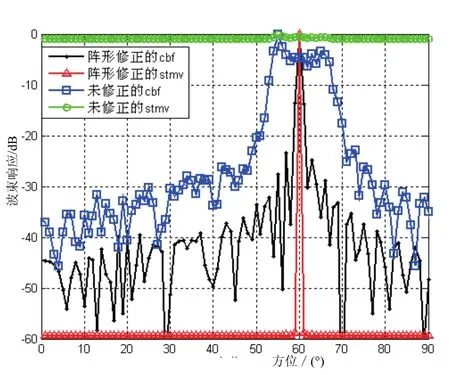
图3 理想直线阵与估计阵形波束形成对比

图4 阵形畸变程度对于阵增益的影响
从图2和图5中可以发现,本文方法利用航向信息对于期望阵形的估计较为准确,与期望阵形基本一致。定义估计误差作为衡量阵形估计方法的估计精度,估计误差通过计算每个估计点的x、y轴坐标(水平面,下文同)与期望阵形各个点差值的方差之积,即

式中,n为总的估计次数。从图6中可以看出,在传感器无量测误差的情况下,随着阵形畸变变大,估计误差也随之增加,并且最后估计误差接近于直线上升。图7中在给每个航向传感器加入误差后,估计误差上升速度较无噪声时快。因此,传感器数量越多,阵形估计就会越精准,但是估计精度受到的传感器量测误差的影响也越大。所以,在估计误差的可容忍范围内,需要控制传感器数量,以此来提高阵形的估计精度。
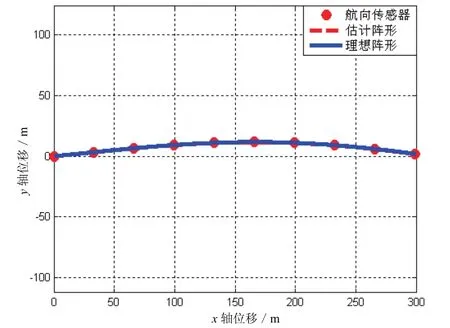
图5 本方法估计出的阵形

图6 估计误差与畸变程度的关系
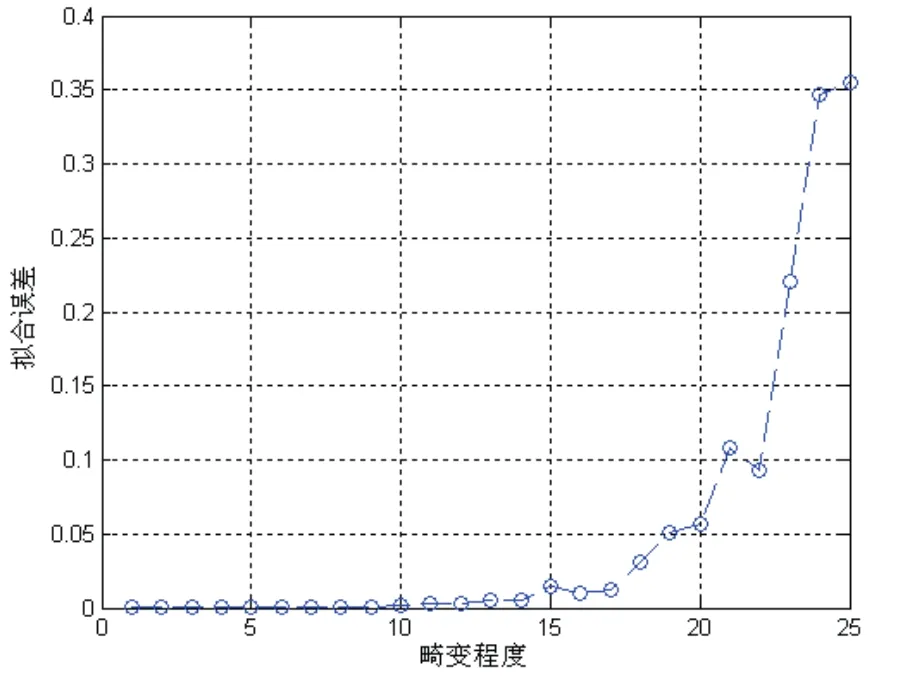
图7 估计误差与畸变程度的关系
利用估计阵形更新驾驶向量,使其能够匹配期望阵形,完成波束形成。从图5中可以看出,阵形修正后的CBF与STMV检测能力大幅度提高,并且算法估计出的到达角与假设一致。并且STMV的性能在阵形估计的帮助下性能提高明显。在图2中不难看出,即使是随着阵形畸变的不断增大,STMV的性能依然保持稳定。通过阵形估计,利用STMV,声呐性能将有很大提高。
4.2 海试数据分析
为了验证上述理论分析和仿真结果的正确性,对于某次海试的实际数据进行处理。比较阵形畸变对于CBF算法以及STMV算法的影响,检验阵形估计算法对于实际阵形的估计效果。
实验场景简要介绍如下: 128元拖曳线阵,阵元间距1.2 m,航向传感器间距38.4 m。采集实际数据,在两个不同的时间快拍下,选择一个非合作目标进行比较。通过本文所述阵形估计方法所估计出的阵形如图8所示。由图中可以看出,在这100个快拍的时间中,阵形基本保持稳定,但是与理想直线阵形相比,发生明显畸变,而这样的形变对于DOA估计和检测能力都会有较大的影响。
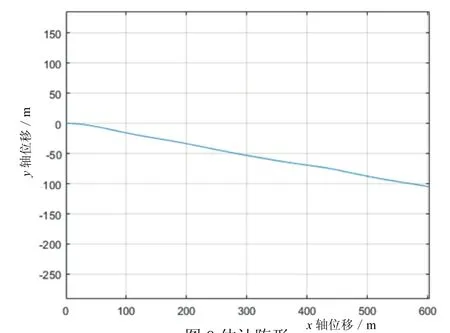
图8 估计阵形
因此,将阵形校正加入到波束形成算法中,比较未校正和校正后的处理结果,见图9~10。从图9中可以看出,校正前后的CBF算法由于检测能力有限并未发现目标,而STMV算法均检测出目标。并且,校正后的STMV算法检测性能更好。具体目标信噪比数据见表1。表中校正后的STMV算法目标信噪比提高了2.6 dB,并且对于目标的到达角也进行了修正。从图10中可以看出,CBF与STMV算法均检测出目标。另外,校正后的驾驶向量对于声程差进行了修正,因此利用修正驾驶向量 CBF与STMV算法均对目标到达角进行了修正,且两种波束形成方法所估计出的角度一致。从表2中数据可知,校正后的STMV与CBF算法检测性能均有提高,信噪比相差分别为5 dB和1 dB。

表1 目标信噪比数据比对

图9 波束响应图a

图10 波束响应图b

表2 目标信噪比数据比对
5 结论
阵形畸变直接影响波束形成算法中的驾驶向量,从而影响波束响应结果以及到达角估计;通过合理的阵形估计算法进行适当的阵形校正的情况下,理论分析、仿真以及海试数据处理证明了合理的阵形估计方法,可以有效地改善波束形成算法性能,并且能够提高大孔径拖曳线阵的检测能力。结合海试数据分析可知本文所述方法具有一定的工程应用意义,可以较好的解决实际问题。然而本文所述阵形估计方法依然存在高航速情况下阵形估计存在一定误差的情况,未来将会进一步提高估计精度,以及针对拖曳线阵三维阵形估计进行研究。
参考文献:
[1]李启虎. 数字式声呐设计原理[M]. 合肥:安徽教育出版社,2002.
[2]朱沛胜, 黄勇. 拖曳线阵阵形估计的自适应 Kalman滤波算法[J]. 声学技术, 2007, 26(1):1-5.
[3]刑韬. 适用于声呐阵形估计的姿态传感器网络设计[J].应用声学, 2008,27(1):42-48.
[4]鲍骏, 郭爱煌. 波束形成在水声定位中的应用[J]. 电子测量技术, 2014, 37(11):42-45.
[5] 董晋, 郭朝阳. 一种适用于主动声呐的宽容STMV波束形成方法[J]. 声学与电子工程, 2012, (4):42-45.
