低信噪比下提升三点测距精度的方法研究
2018-04-27邵游陈伏虎
邵游 陈伏虎
(第七一五研究所,杭州,310023)
被动测距声呐是潜艇综合声呐系统中重要组成部分,而三元阵因为无需太多先验知识且简单实用已经成为其中最常用的一种方法。三元阵的工作原理是利用球面波波阵面曲率的变化,通过测量各个基元接收目标的辐射噪声信号,估计基元间的时延差进而计算目标方位和距离[1]。时延差的精度直接影响到被动测距的性能。因此如何提高不同阵元间时延差估计精度也成为了目前研究的热点。目前常用的时延差估计方法包括普通互相关、广义互相关、二次相关等,这些方法在信噪比较高的情况下时延估计效果较好,但在目标距离较远、信噪比较低时,效果并不是非常理想。为了提升三元阵在实际环境下的被动测距能力,本文在分析了常用时延估计方法后提出了一种将广义互相关、二次相关和直接估计最终时延差相结合的方法,该方法在仿真条件下性能良好,低信噪比情况下定位精度有一定提升,可以在目标距离较远的被动定位实际环境中应用。
1 三点测距原理
被动测距最基本的方法是三点测距,通过测量不同阵元接收信号的时延差来估计目标方位距离。其原理如图1所示。

图1 三点测距示意图
设三点阵的三个阵元在一条直线上,等间距 d布设,分别编号为阵元1、阵元2、阵元3。取阵元2为坐标原点。假设点源S的坐标为(r, θ),辐射声信号 s(t)以球面波方式传播并被三点阵接收到。三个阵元相对于点源S的距离分别为r1、r2、r3,其中r2=r,r为要测定的目标距离。三阵元接收到的信号分别为 s(t+τ1)、s(t+τ2)、s(t+τ3),且τ1=r1/c,τ2=r2/c,τ3=r3/c(c 为声速)为传播时延,则两两阵元间接收信号的时延差分别为
根据阵元间距和声源距阵元之间距离的关系可以推出以下结论[2],声源方位θ为

距离r为
为了简化计算,r可近似为
由公式(3)、(4)可以看出定位精度主要取决于时延差估计精度,特别是 ε=Δτ12-Δτ23的精度。
2 时延估计方法
2.1 广义互相关时延估计
互相关法是根据两两信号的互相关函数的峰值位置确定相对时延值,原理是计算两路输出的互功率谱,根据其最大值的位置来确定时延。阵元1、阵元2接收的离散信号模型为
式中Δτ0为两接收信号之间的时延差,s(n)是宽平稳的随机信号,n1(n)、n2(n)均为 0均值的独立平稳高斯白噪声信号,假设 s(n)与 n1(n)、n2(n)互不相关,即E{s(n) n1(n)}=0,E{s(n) n2(n)}=0。
确定阵元1、2之间的时延差Δτ12的方法是通过计算x1(n)和x2(n)的互相关函数来实现的。

其中Rss代表s(n)的自相关函数,Rsn1代表s(n)与n1(n)的互相关函数,Rn1n2代表n1(n)与n2(n)的互相关函数,其余的以此类推。根据自相关函数的特性可以得到:

即,当Δτ=Δτ12时,R12取得最大值。取R12为最大值的Δτ为时延差估计值

以上为普通互相关的基本原理,由于普通互相关容易受噪声影响,造成主极大峰值不明显或者有多个峰值,从而降低时延估计精度。因此为了提高时延估计精度,可采用广义相关时延估计方法,如图2所示,阵元1、阵元 2的接收信号为x1(n)、x2(n),分别经过预滤波器 H1(f)和 H2(f),然后再对其输出y1(n)和 y2(n)求互相关函数,并经峰值检测而得到时延估计[3-4]。其中,取使得y1(n)和y2(n)的互相关函数Ry1y2(Δ τ)取最大值的Δτ为最终时延差。


图2 广义互相关示意图
2.2 二次相关时延估计
二次相关时延估计是在互相关时延估计算法的基础上,对两个信号先做自相关和互相关分别得到R11和R12,并且把R11和R12当作两个新的信号,然后再进行相关运算,以提高信噪比和分辨力[5]。

因为R11和R12也是时间函数,所以可以用n来替代Δτ,因此对R11(n)和R12(n)做互相关得到

由于噪声和信号之间不相关,且噪声之间相互独立均值为0,式(11)可以化简为

根据自相关函数的特性,在 Δ τ = Δτ12时,R1112(Δ τ)取得最大值。其中Rssss代表纯信号做二次相关,由于Rssss相比Rss更尖锐。同时当噪声均值不为 0时,式(11)对噪声也做二次相关使得其幅度更小,对信号的影响也越小,所以相同的条件下二次相关时延估计精度更高[6]。
3 改进的时延估计算法
为了进一步的提升三点被动定位的精度,本文提出了将广义互相关、二次相关相融合,并且改变时延估计策略,将分别估计阵元1、2和阵元2、3之间的时延改为直接估计最终时延差ε,该方法能融合上述方法的优点,有效地提升三点定位在低信噪比的条件下定位精度,具体流程见图3。
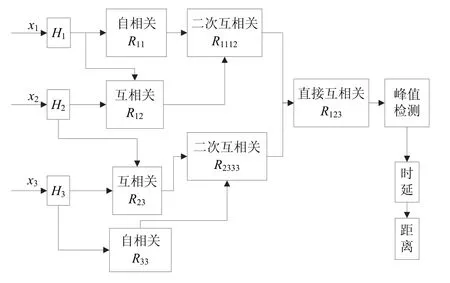
图3 改进时延估计算法后三点定位流程图
图3中,算法首先将广义互相关与二次相关相结合,即先对 x1、x2、x3分别预滤波然后对 x1、x2和 x2、x3均做二次相关得到 R1112和 R2333,并将其看作两路新的信号然后做互相关,得到R123后进行峰值检测,换算成定位所需的时延ε后,得到最终定位距离。其中直接估计最终时延差的方法如下:由三点定位公式可知,定位最大的误差来源于时延估计的误差。常规的三点定位流程首先分别估计阵元1、2和阵元2、3之间的时延差,即Δτ12和Δτ23,通过互相关函数

再经峰值检测便可估计Δτ12和Δτ23,代入公式(4)进而可计算出距离。其中R1112和R2333分别为阵元1、2和阵元2、3的二次互相关函数。
实际中Δτ12和Δτ23的值都非常小,通常都是微秒级别,在计算过程中难免有精度的损失。尤其在信噪比比较低的情况下对定位结果会造成较大的误差,由于互相关函数同样是时间函数,可以对互相关函数 R1112(Δτ)与 R2333(Δτ)再次作相关,用 n 来替代Δτ,对R1112(n)和R2333(n)互相关可表示为

令 n=n+Δτ23,即将R1112(n)和 R2333(n)两路信号均补一个Δτ23的时延,得到

其中 RRs表示对 Rssss做自相关,因此当 ε=Δτ12-Δτ23时,R123取最大值。即对阵元1、2和阵元2、3之间的二次相关函数再次做互相关可以直接得到Δτ12-Δτ23。这样做可以一次估计出时延差ε,减小计算精度的丢失,代入定位公式后可直接求出距离结果。即
直接估计最终时延差即对二次相关函数R1112(Δτ)与R2333(Δτ)再次作相关直接估计ε取代分别估计Δτ12和Δτ23,以此来减小计算过程中时延估计精度的丢失对定位结果的影响。
4 仿真验证
为取一段1~3 kHz的宽带噪声信号为信号源,采样频率为300 kHz,三点阵元间距为30 m,目标距离2号阵元10 km,目标方位为30°,信号长度为0.05 s,在改变接收信号信噪比的情况下,通过几种时延方法对定位结果的影响来比较算法的性能。声源信号时域频域如图4所示。
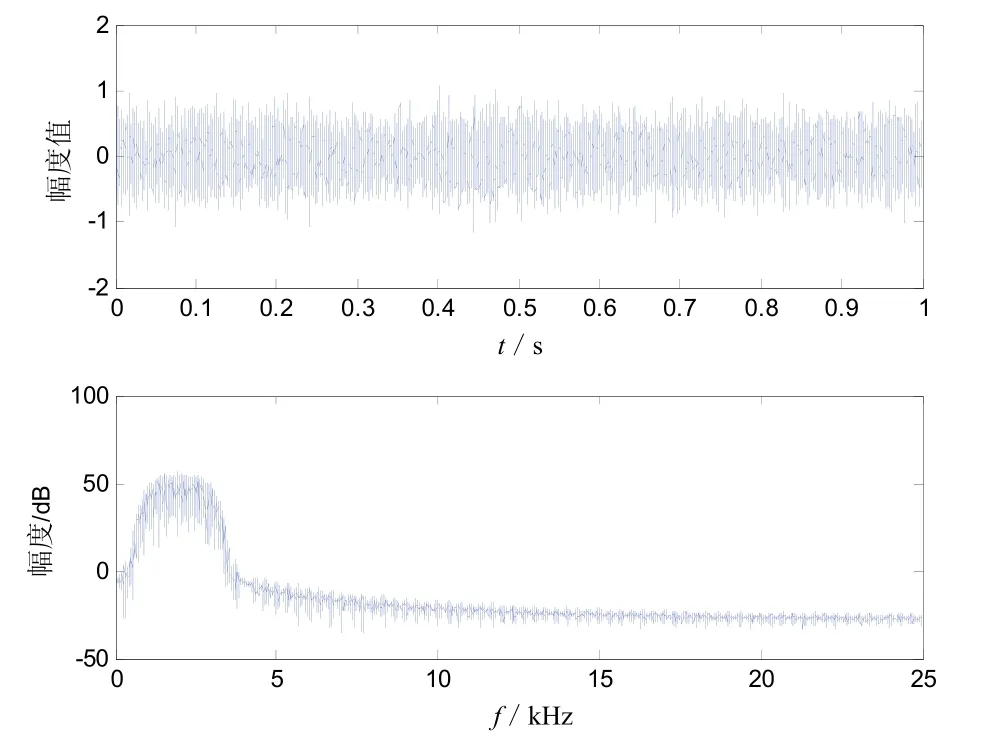
图4 声源信号的波形(上)和幅频图(下)
通过N次蒙特卡洛仿真实验,进而统计接收信号在不同SNR下的三点定位误差的均值。其中误差的定义为

误差均值为

误差方差为

N取100,通过误差的均值和方差来对比广义互相关、二次相关和改进后的三种时延估计方法的定位效果。其中μ1、σ12、μ2、σ22、μ3、σ32分别是三种方法下的定位误差均值和方差。

图5 定位误差均值随SNR变化图
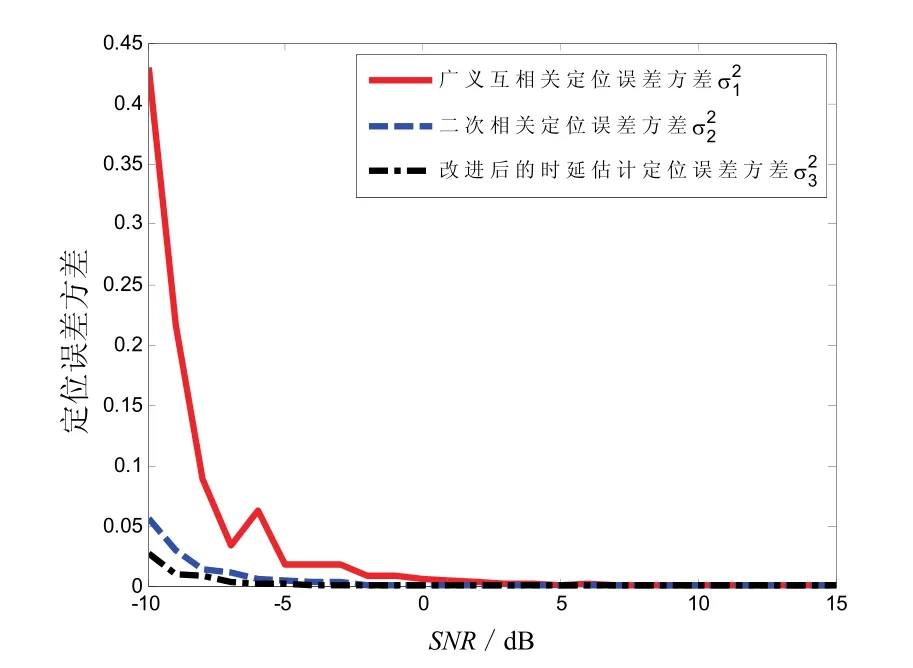
图6 定位方差随SNR变化图
由图5、6可以看出改进后的时延估计在低信噪比条件下无论是均值还是方差都较其它两种方法高。其中具体定位精度的提升幅度如下所示。定义误差提升值1α、2α如式(20)所示,其中1α、2α的曲线如图7所示。

图7 改进后时延估计方法对定位精度提升图
图7中曲线α1为改进后方法相对于广义互相关时延估计定位精度提升值,曲线α2为改进后方法相对于二次相关定位精度提升值。可以看出 SNR在-10~5 dB情况下,改进后方法相对于广义互相关方法对定位精度提升效果最好。在-10~0 dB情况下,相对于二次相关方法对定位精度提升效果较好。
综合上述仿真结果可以知道,常用的广义互相关方法在低于0 dB信噪比条件下定位误差非常大,难以实现高精度的位置估计。而二次相关可以通过噪声的二次相关在一定的程度上提高定位精度。通过改进后的时延估计方法可以结合以上两种方法的优点,不仅可以对噪声进行预白化,还可以对噪声做二次相关,进一步抑制噪声的影响。同时实际中如果声源距离较远,时延差将会非常小,精度要求很高,因此采用直接相关估计ε而非分别估计Δτ12和Δτ23可以减小计算过程中时延精度的丢失。如图5所示,在信噪比低于0 dB条件下,改进后方法相对于二次相关对定位结果有一定的提高。仿真结果表明,改进后的时延估计方法不仅提升了三点定位抑制噪声影响的能力,还提高了其定位精度,同时误差的方差也更小。
5 结论
广义互相关时延估计是时延估算领域的经典算法,也是目前实际中使用较多的方法,具有较高的估算精度,但是在低信噪比情况下误差较大。而二次相关利用对信号和噪声均做二次相关,能有效抑制噪声的干扰,提高时延估计的抗噪声性能,但是精度仍有待提高。因此,本文提出了将以上两种方法相结合,并且在此基础上将时延估计由分别估计τ12和τ23改为直接估计时延差ε。通过仿真验证了该方法可以进一步提升低信噪比条件下的定位精度,具有较强的实用性。
参考文献:
[1] 周伟. 三元阵浅海近程被动定位研究与分析[D]. 哈尔滨工程大学, 2009.
[2] 彭阐, 姜可宇. 三元相关被动测距方法探讨[J]. 声学技术, 2012, 31(4):431-435.
[3] KNAPP C, CARTER G. The generalized correlation method for estimation of time delay[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1976, 24(4):320-327.
[4] QUAZI A. An overview on the time delay estimate in active and passive systems for target localization[J].Acoustics Speech & Signal Processing IEEE Transactions on, 1981, 29(3):527-533.
[5] 周康辉, 董万胜, 刘恒毅,等. 利用二次相关改进的广义互相关时延估计算法[J]. 数据采集与处理, 2013,28(6):801-806.
[6] 唐娟, 行鸿彦. 基于二次相关的时延估计方法[J]. 计算机工程, 2007, 33(21):265-267.
