Design method of organizational structure for MAVs and UAVs heterogeneous team with adjustable autonomy
2018-04-27CHENJunQIUXunjieRONGJiaandGAOXiaoguang
CHEN Jun,QIU Xunjie,RONG Jia,and GAO Xiaoguang
1.School of Electronics and Information,Northwestern Polytechnical University,Xi’an 710072,China;2.Centre of Applied Informatics,College of Engineering and Science,Victoria University,Melbourne VIC 8001,Australia
1.Introduction
The collaborative operations by manned and unmanned aerial vehicles(MAVs and UAVs)in a heterogeneousteam can reduce the risk of casualties.Low communication overhead that MAV pilots bring,can give unmanned aircraft rapid response advantages.Therefore,to find a preferential solution to control and manage such heterogeneous teams becomes a hot topic[1–3].The organizational structure of a heterogeneous team is an important factor to raise combat effectiveness,which is built based on the characteristics of the battle field environment and the state of the combat entity,including the type,function,performance,position,levels of autonomy,role,communication,and mission.To implement an adjustable structure,adding special designed adjustable autonomy into the optimal design part can adjust the proposed organizational structure to ensure a maximum completion of the task.This design mainly considers a number of questions such as whether the combat resources can be fully utilized;whether the communication between each combat entity is unobstructed;whether the structure has a certain degree of flexibility;whether the workload can be distributed balanced;and finally,whether the assigned task can be successfully completed.
Recently,researchers in organizational structure design have moved their focus to structural adaptability and applications in information warfare field[4–7].The relevant work includes dynamic adaptability, agile organization and system-of-systems engineering [8 – 11], and also the applications in resource integration, information flow, and information structure[12–15].A variety of methods have been adopted in those studies[16,17],for example,organization and management theory,network theory,social network analysis,and agent-based models[18–24].The general approach is to separate decision-making entities from the platforms.However,it ignores MAVs’roles for supporting UAVs in decision-making and battle field environment intervention.The main purpose of this study is to build an organizational structure solution that allows MAVs to support UAVs.The proposed solution is expected to be reasonable,efficient, flexible,and reconfigurable to environmental changes in order to complete the assigned task successfully.
2.Organizational structure concept of MAV and UAV heterogeneous team
Organizational structure design dynamically identi fi es a series of relationships between combat entities.This is driven by combat mission and affected by battle field environment as well as the state of combat entity.The combat mission is a series of combat activities designed by a combat target.UAV is the direct undertaker of combat activities;while MAV plays a role of coordination or management.

Fig.1 An example of manned and unmanned aircraft organizational structure
Definition 1Manned and unmanned aircraft organizational structure is a series of matching relations,to complete the assignment task effectively with limited resources.It includes three types of relations:(i)cooperative relationships between UAVs and cooperative relationships between MAVs;(ii)supervisory control relationships between MAVs and UAVs;(iii)decision-making authorization relations between MAVs,as shown in Fig.1.(i)The UAV cooperative relationship is set when different UAVs are assigned to the same task;(ii)the supervisory control relationship is generated when MAV supports or supervises the tasks assigned to UAVs;(iii)the MAV cooperative relationship is built when indirect cooperation occurs from different UAVs which are controlled by different MAVs;(iv)the decision-making authorization relation between MAVs is generated by its roles in the structure.This role is mainly determined by two factors,the centrality measure(a statistical measure assigns each MAV a number representing its importance)and the ability of more decision-making information processing.
3.Organizational structure modeling
The design of organizational structure includes the following three processes:(i)establish the cooperative relationships and supervisory control relationships,according to the analysis of the battle field changes;(ii)use the mechanism of adjustable autonomy to balance the changes of the relevant variables and increase the flexibility of the previous relationship;(iii)on the basis of the previous structure,establish the decision-making hierarchy relationship between the MAVs based on the relevant factors.
3.1 Establishing cooperative relationship
This relationship depends on the mechanism of task assignment.As it is not the focal point of this article,we do not elaborate here.The cooperative relationships between the UAVs and the tasks are pre-assigned.And then we can build the corresponding cooperative relationships between the MAVs.For example,when UAV1 and UAV8 are assigned to the same task T2,the cooperative relationship between the UAVs is set.If UAV1 is controlled by MAV1,and UAV8 is controlled by MAV3,then the cooperative relation ship between these two MAVs(MAV1and MAV3)is built.
3.2 Establishing supervisory control relationship
As the war universe has been expanded from the land,the sea and the air to the information space and the psychological space,it is manifested as multiple roles in different fields,such as physical domain,information domain and cognitive domain[25],as shown in Fig.2.From the physical domain perspective,the performance of MAV support to UAV mission equipment is represented by physical resource support capabilities Lprs;from the cognitive domain perspective,the performance of MAV support to UAV intelligence is represented by the intelligent resource support capabilities Lirs;from the information domain perspective,the statistical performance of the organizational network is represented by network efficiency Neand network vulnerability Nv.In addition,task execution reliability R is used to represent the suitability of the MAV-UAV match on the task.If there is a supervisory control relation ship between MAVs and UAVs,we call that UAVs configured to MAVs.
3.2.1 Definition of metrics
In the implementation of task activities,the physical resource support capabilities refer to the physical domain,which are generated by MAV based on its equipment to compensate for the UAV which lacks capacity.
Definition 2Physical resource capabilities include mobility,detection capabilities,communication,endurance,combat capability,interactive ability,and collaboration.

Fig.2 Metric analysis model that shows how the organizational structure is established
The physical resource support capabilities are fixed and not subject to the levels of autonomy.
Definition 3Intelligent resource capabilities refer to the capabilities generated by an MAV in the cognitive domain to support the intelligent level of UAV’s observation,cognition,analysis, planning,decision,action and communication,which is presented as

The intelligent support capabilities change with the autonomy level adjustment.
Definition 4Network efficiency is the efficiency of information transfer in an organizational network,and the function is presented as

where MAV or UAV is anode,and cooperative relationship or supervisory control relationship is an edge,then a structure is built.N is the number of nodes,V is the cooperative network,i and j represent the different nodes,and dijis the shortest distance between the nodes.If there is no edge between nodes,define the distance as infinity.

Definition 5Network vulnerability is the ratio of network efficiency change after a node is removed,which can be presented as where Ne(i)is the network efficiency after removing node i.Network vulnerability is the vulnerability of the most vulnerable nodes.
Definition 6Task execution reliability is used to indicate the match degree between MAVs and UAVs in one task.When task execution reliability R is calculated,it cannot be completely separated as an independent variable,then a fuzzy cognitive map(FCM)model is established.In Fig.3,C0represents task execution reliability R in a conceptual model of FCM.It can be used to estimate the reliability of the overall task execution.
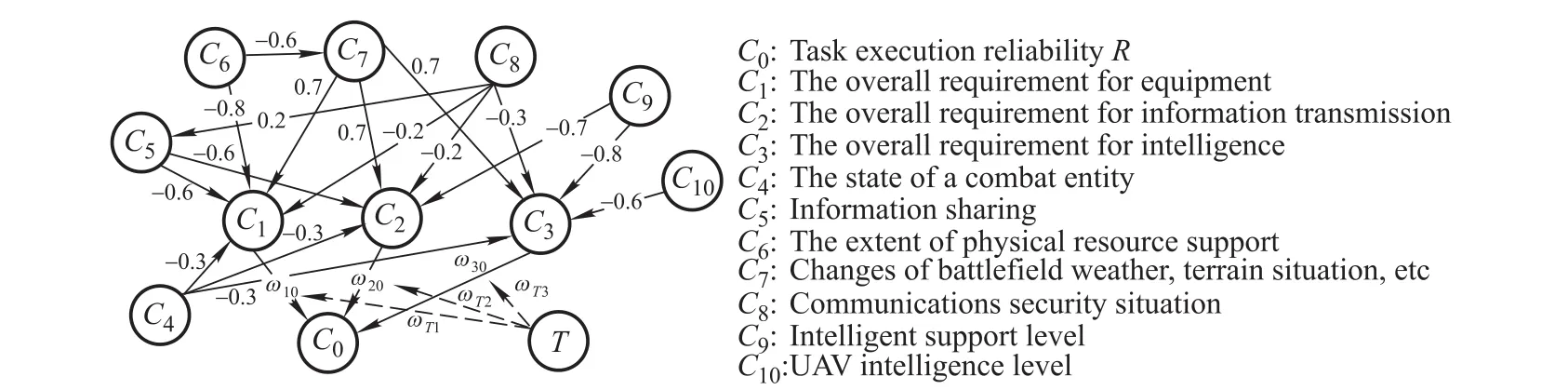
Fig.3 A conceptual model for task execution reliability calculation
FCM is a graph structure,in which complex causes and effect events in fuzzy feedback dynamical systems are connected through directed arcs according to their causal relationships.Each node has a state space.The FCM state space is automatically adjusted by a threshold/evolution function,and the dynamic behavior of the system is simulated through the interaction between the concept nodes of the whole network.The basic concepts of FCM are detailedly described in[26],so we will not repeat it here.
In Fig.3,the concept T affects the weight ω(i0)by the coefficient ω(Ti).T indicates the sensitivity of the task to the physical domain,the intelligent domain and the cognitive domain.Among them,C4∼C5,C7∼C8concepts are input nodes,C0is an output node.C1∼C3,C6,C9∼C10concepts are intermediate nodes,which are obtained by the specific structure.
Reliability FCM calculation is carried out in two steps:(i)calculate the concept C1,concept C2and concept C3according to Fig.3;(ii)calculate the concept C0according to the task for the concept C1,concept C2and concept C3demand tendencies.
The calculation rule[27]is

The value of reliability R in both extreme cases is considered.Let’s take the worst case in the mission environment as an example:the worst state of the combat entity;the lowest degree of information sharing;UAV mission payloads only;battle field environment changing dramatically;limited communications;unobtainable MAV intervention;the lowest level of autonomy.Then the concept domain becomes[C4,C5,C6,C7,C8,C9,C10]=[0,0,0,1,0,0,0].The reliability is indicated as C0=0,that means the system maintenance is not available,which is consistent with the subjective experience.
On the other hand,for example,in the ideal conditions:

the reliability C0=1,which is consistent with the subjective experience.Results reflect that the range of values for R is zero to one.
3.2.2 Constraints
In terms of impacts of battle field environmental factors and mission requirements, the supervisory control relationships between MAVs and UAVs have the following constraints.
Constraint 1The demand of UAVs for additional resources is the result of changes in the battle field environment.UAVs are con figured to MAVs when MAVs can meet UAVs’requirements in terms of resource capacity,that is

where Lprs-uavidenotes the physical resource support required by UAVi,and Lprs-mavjdenotes that MAVj can provide physical resource support.
Constraint 2Additional UAV intelligence is needed as the battle field environment changes constantly.UAVs interact with MAV drivers to address this need,and levels of autonomy will be adjusted accordingly.It will increase the driver’s workload,and the driver’s workload capacity will affect UAVs’con fi guration,that is

where Lirs-uavidenotes the intelligent resource support required by UAVi,and Lirs-mavjdenotes that MAVj can provide intelligent resource support.
Constraint 3Because of the rapid changes in the battle field environment,it is necessary to ensure missions are smoothly implemented within a strictly limited time.The limitation of time on interaction directly determines whether the topology could be generated or not.That is,if time limit is exceeded,there will be no cooperation or interaction between MAVs and UAVs.

where dtidenotes the actual delay and dti-stddenotes the delay’s limit value.
Constraint 4The task is based on the results of combat planning objectives.To ensure the completion of the mission,the reliability of task execution must be ensured.

where Ridenotes the actual reliability and Ri-stddenotes the limit value of the reliability.
3.2.3 Mathematical model
The evaluation function is the criterion for judging the merits of relationships network.It is calculated by using the normalized value of the metric and its weight on the task.The mathematical model of the problem of cooperative and supervisory control relationship network design can be presented as
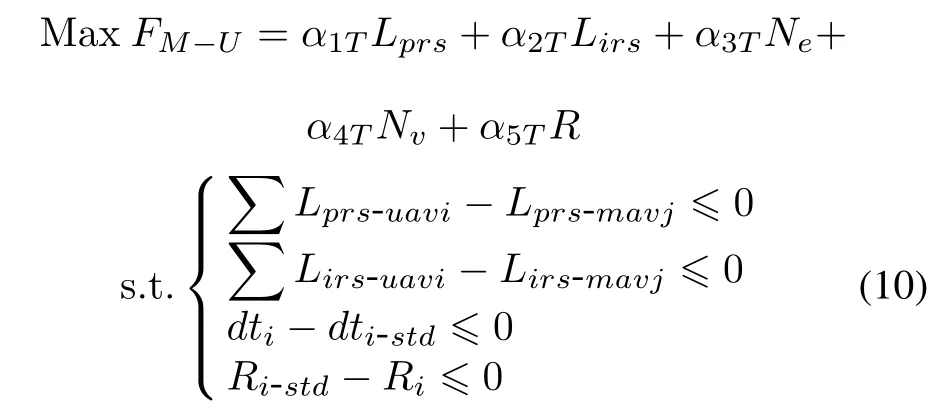
where Lprs,Lirs,Ne,Nv,R are the normalized values of each measure. All metrics are processed by the range transformation method.Lprsand Lirstake the corresponding maximum percentage of occupancy.It is used to indicate the smallest of the redundancy,that is,the capability of changes in the battle field environment that the structure can obtain under the current condition.Ne,Nvand R do not need to be processed.α1T,α2T,α3T,α4Tand α5Tare the weights of the corresponding measures of the combat target M.
3.3 Classification and adjustment mechanism of levels of autonomy
The factors that bring different structures are the adjustment of the levels of autonomy(LOA),the reliability of the task’s completion and the resource capabilities.The mechanism of adjustable autonomy can cause the dynamic optimization of intelligent resource allocation.According to the UAV decision-making authority in the MAV and UAV between the distributions,design five levels of autonomy[28]as shown in Table 1.
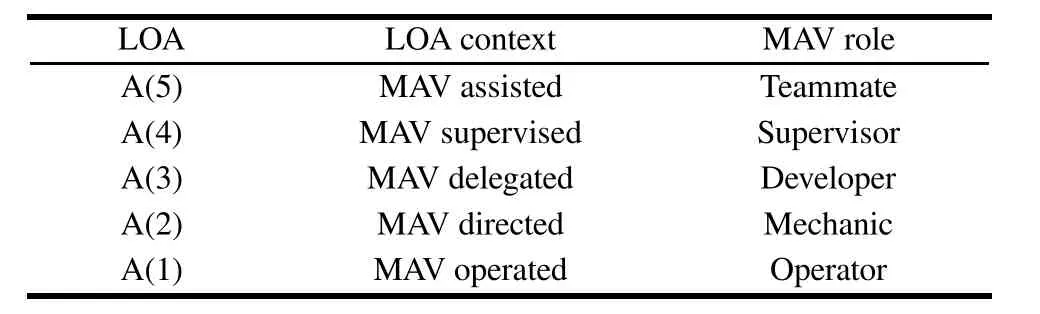
Table 1 Five levels of autonomy
Definition 7The intelligent support process of MAV-assisted UAV includes sensing,perceiving,analyzing,planning,deciding,acting and communicating.
MAVs adjust the proportion of the decision-making authorityof UAVs in the intelligent support process, as shown in Fig.4.The lowest factor determines the current LOA.UAVs adjust the parameters from high to low,and MAVs do the opposite.This allows us to calculate the changes in the workload that the MAV generates during intelligent support when the level of autonomy is adjusted.
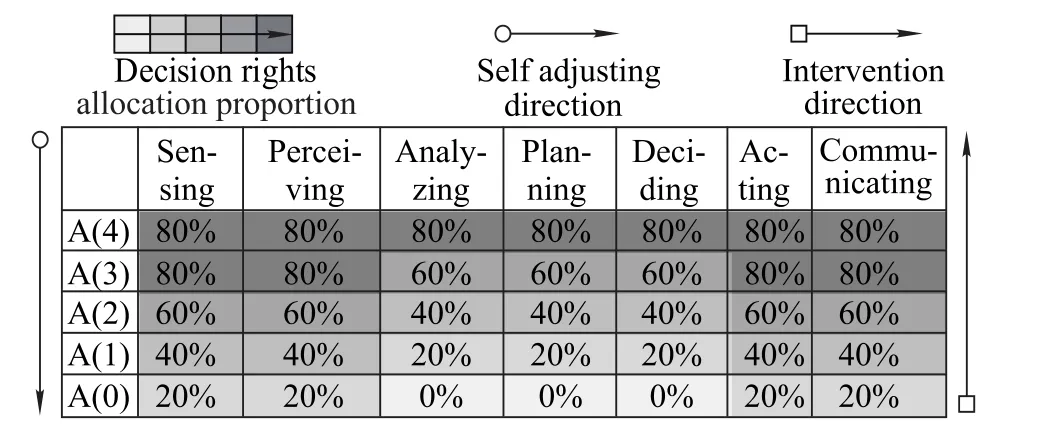
Fig.4 LOA adjustment mechanism
3.4 Establishing decision-making hierarchy relationships
Decision-making hierarchies are based on the cooperative and supervisory control relationships,and are used to describe the centralization of decision-making authority and the direction of decision-making information transmission.
3.4.1 Definition of metrics
Definition 8Decision workload is the total number of intelligent support processes that the MAV uses for the lower level MAV or UAV,indicated as

where ωM-Mis a binary function to judge whether intelligent support exists among the MAVs,ωM-Uis a binary function to judge whether the MAV has intelligent support for the UAV,Num(MAVi)is the number of intelligent supporting processes for MAVi,and Num(UAVj)is the number of intelligent supporting processes for UAVj.
Definition 9Node betweenness[29]is the ratio of the number of paths passing through the shortest path in network to the total number of possible shortest paths,indicated as

where Njlis the number of shortest paths between nodes vjand vl,and Njl(i)is the number of possible shortest paths passing node vibetween node vjand vl.The node betweenness reflects the role and influence of the corresponding node in the whole network.
3.4.2 Constraints
Here are the constraints to be considered in establishing decision-making hierarchy relationship.
Constraint 5MAVs at the high decision-making level need to be responsible for assisting the decision of the corresponding low-level MAVs or UAVs.The processing capacity of the decision-making will affect the decision making authority configuration,that is

where Lirs-uavirepresents the workload required for the decision-making of UAV i;Lirs-mavjrepresents the workload of the decision-making required by MAVj;and Lirs-mavkrepresents the workload of the decision-making that MAVk can provide.
Constraint 6There is no cooperation or interaction between MAVs over time limits.

where dtirepresents the actual delay and dti-stdrepresents the delay’s limit value.
3.4.3 Mathematical model
The mathematical model of the problem of decision making hierarchy relationship network design is defined as follows:


where Ldmand Biare the normalized value of each measure.Ldmand Biare treated with min-max normalization.β1Tand β2Tare the weights of the measures corresponding to the combat target M.
4.Design method of organizational structure
Based on the organizational structure design mathematical models described above,the proposed organizational structure aims to provide solutions to two sub-problems for each relationship:(i)a feasible set of matching relations G is established between the MAV and the UAV under constraint conditions;(ii)to find the optimal relation from the feasible relations G,the overall idea is to establish the matching relationship between the MAV and the UAV randomly,and then use the Tabu algorithm[30]to filter and select the optimal solution.
4.1 Searching for optimal cooperative and supervisory control relationships based on Tabu search algorithm
Two neighborhoods are designed to operate on different objects(the order of addition of UAV and UAV levels of autonomy),which is configured with the corresponding two Tabu lists.
The order of addition of UAV 2-switch exchange Tabu list:if the current exchange of two UAVs(J1→J2),then the next NJgeneration,not allowed to operate J2→J1.
UAV levels of autonomy Tabu list:if the current generation of UAVi levels of autonomy is adjusted,then in the next NXgeneration,UAVi is not allowed to reverse the direction of the levels of autonomy of adjustment operations.
Four steps in the adopted Tabu algorithm for searching are described as follows:
Step 1Match the UAV to the MAV at random to determine whether the constraint is satisfied.
Step 2Adjust the UAV levels of autonomy,satisfying the constraints will be preferred.If all of the adjustments do not meet the constraints,operate2-switch exchange and return to the previous step.The Tabu list is updated.
Step 3Calculate the evaluation function and perform the optimization.
Step 4Repeat the abovesteps until the termination criterion is met.
The algorithm terminates when successive iterations of the NDgeneration optimal solution does not change.
4.2 Searching for optimal decision-making hierarchy relationships
In this process,the main purposes include identifying important combat entities with a high decision-making authority,balancing the decision-making workload and achieving the smooth transmission of decision-making information.These can be achieved using the following three specific steps:
Step 1Calculate the node betweenness of each combat entity;
Step 2If the node with the largest node betweenness satisfies the constraints,take it as the vertex,the decision workload as the weight matrix,construct the minimum spanning tree,and calculate the evaluation function;
Step 3Select the node with the second largest node betweenness,repeat Step 2 until there is no MAV node in the available root node,and calculate the evaluation function.
5.Simulation experiments and results
The simulation experiments took use of three MAVs and ten UAVs to form heterogeneous teams to combat the enemy front-line temporary command center.The process is shown in Fig.5.The corresponding relationships between the UAVs and the tasks are pre-assigned.

Fig.5 Combat mission plan scenario
5.1 Simulation experiment 1
The change of mission environment causes the demand for physical resources and intelligent resources of UAVs at certain moment,as shown in Fig.6.The upper part of the graph is the result of the relative value evaluation of each component of the physical and intelligent support that the MAVs can provide,and the lower part is the UAVs’needs.The initial UAVs’levels of autonomy default are shown in Fig.7,to define the autonomous level of UAV2,UAV8,and UAV10 as A3,and the rest as A2.And the interaction latency between MAVs and UAVs is shown in Fig.8,and FCM concept assignment is shown in Table 2.MAVs do not interfere with the evaluation function weight,or interfere with UAV levels of autonomy.
The Tabu search algorithm is used in this experiment,and the optimal process of the feasible scheme between MAVs and UAVs is obtained.As shown in Fig.9,the physical resource support capabilities normalized value Lprs,the intelligent support capabilities normalized value Lirs,and the network vulnerability N(v)are used as costtype indices.The overall process of program selection shows a decreasing trend.The network efficiency N(e)and the task execution reliability R are used as incometype indices.The overall process of program selection shows an increasing trend.

Fig.6 Asset-resource-capability matrix

Fig.7 Levels of autonomy matrix

Fig.8 Information transfer delay matrix

Table 2 FCM concept value matrix
The evaluation function F tends to increase with the program selection.The optimal solution to the problem is F=0.627 1,as shown in Fig.10.The corresponding Lprs=0.833 3,Lirs=0.600 0,N(e)=0.192 3,N(v)=0.2667,and R=1.000 0 in the preferred process of the feasible scheme.

Fig.9 Diagram of simulation results
The node betweenness calculated by the final structure and the corresponding decision workload is shown in Fig.11.We can see MAV3 has the largest node betweenness with a value of 15.And the spanning tree structure with MAV3 as the root node is the best in the decisionmaking and the information transmission effect.Simulation experiment 1 validates the feasibility of the structure design method.

Fig.11 Node betweeness of the final structure
Consider two important task approaches:UAV2 and UAV9 are responsible for searching the enemy command center location and compete for air supremacy of these two tasks,but they do not have the ability to strike.And they focus more on detection,so configure them to one MAV to achieve the purpose of rapid response. Experience suggests this is reasonable.Furthermore,UAV3 is responsible for the command center’s attack.Attack capability of MAV1,MAV2 and MAV3 is incremented.Thus it is reasonable that UAV3 is finally configured to MAV3.The analysis shows that the structure obtained by this method is reasonable.
5.2 Simulation experiment 2

Fig.12 Three different output schemes shown by three different designed cases
In simulation experiment 2,the basic parameters are set as the same as the simulation experiment 1,shown in Fig.12 to establish three different situations.The final output structure in the various scenarios resulting from the simulation process is the one with the highest evaluated score.Due to the different emphases of the evaluation function,Case 1 is different from the final output of simulation experiment 1.Because UAV5’s LOA is limited,in Case 2,UAV5 is configured to MAV3 with more resources to balance the workload.Case 3 is different from the former two as the UAV7’s workload is reduced first and then it is rebalanced again.Based on the same basic parameters,under different control conditions,the final output structure is different,indicating that the structure design method is flexible.
6.Conclusions
In this paper,we propose a multidimensional method that includes multiple constraints, which can establish a reasonable and efficient organizational structure.Under various environmental changes,we use the organizational structure with the adjustable autonomy to achieve flexibility.The simulation results demonstrate that the organizational structure can be adjusted as the environment changes or by MAV intervention with this method.Future work will focus on the study of the design and adjustment of the organizational structure which has all the units involved in a task cycle.
[1]RUFF H A,NARAYANANS,DRAPER M H.Human interaction with levels of automation and decision-aid fidelity in the supervisory control of multiple simulated unmanned air vehicles.Cambridge,MA:MIT Press,2002.
[2]LETTL B,SCHULTE A.Self-explanation capability for cognitive agents on-board of UCAVs to improve cooperation in a manned-unmanned fighter team.AIAAInfotech@Aerospace,2013:AIAA-2013-4898.
[3]LEVULIS S J,KIM S Y,DELUCIA P R.Effects of touch,voice,and multimodal input on multiple-UAV monitoring during simulated manned-unmanned teaming in a military helicopter.Proc.of the Human Factors and Ergonomics Society Meeting,2016:132.
[4]GOERGER S R,MADNI A M,ESLINGER O J.Engineered resilient systems:a DoD perspective.Procedia Computer Science,2014,28:865–872.
[5]NECHES R,MADNI A M.Towards affordably adaptable and effective systems.Systems Engineering,2012,16(2):224–234.
[6]YU F,TU F,PATTIPATI K R.Integration of a holonic organizational control architecture and multiobjective evolutionary algorithm for flexible distributed scheduling.IEEE Trans.on Systems,Man,and Cybernetics—Part A:Systems and Humans,2008,38(5):1001–1017.
[7]KEVIN B,RAN B.Organisational resilience:development of a conceptual framework for organisational responses.International Journal of Production Research,2011,49(18):5581–5599.
[8]WEBER R.Addressing value-centric design as a multi-scale C2 problem.AIAA Space Conference&Exposition,2010:AIAA-2010-8798.
[9]SUN Y,YAO P Y,LI M H,et al.Adaptive adjusting method of command and control structure of army organization.Systems Engineering and Electronics,2016,38(9):2086–2092.(in Chinese)
[10]TRAN H T,MAVRIS D N.A system-of-systems approach for assessing the resilience of recon fi gurable command and control networks.AIAA Science and Technology Forum and Exposition,2015:AIAA-2015-0640.
[11]SINDIY O,DELAURENTIS D,PERL S.Veri fi cation and validation of system-of-systems models for lunar command,control,communication,and information architecture.AIAA Space Conference&Exposition,2009:AIAA-2009-6557.
[12]SINDIY O V,DELAURENTIS D A,CALDWELL B S.Command,control,communication and information architectural analysis via system-of-systems engineering.AIAA Space Conference&Exposition,2010:AIAA-2010-8645.
[13]SUN Y,YAO P Y,WU J X,et al.Design method of flattening command and control structure of army organization.Systems Engineering and Electronics,2016,38(8):1833–1839.(in Chinese)
[14]YANG C H,CHEN H H,LUO X S.Evaluating the C2 organization structure based on information flows.Systems Engineering and Electronics,2007,29(4):574–578.(in Chinese)
[15]SUN Y,YAO P Y,ZHANG J Y.Measurement and comprehensive evaluation of C2 organizational information structure efficiency.Systems Engineering and Electronics,2015,37(6):1313–1318.(in Chinese)
[16]ZHANG J Y,LAN Y S,YI K,et al.Model and solving method for adaptive evolution of command and control relationship in C4ISR system.Systems Engineering and Electronics,2015,37(7):1543–1550.(in Chinese)
[17]LEVITT RE.Computational modeling of organizations comes of age.Computational&Mathematical Organization Theory,2004,10(2):127–145.
[18]NISSEN M E,BUETTNER R R.Computational experimentation with the virtual design team:bridging the chasm between laboratory and field research in C2,VA 22202-4302.Washington,DC:Standard Form,2004.
[19]ALBERTS DS,NISSEN M E.Toward harmonizing command and control with organization and management theory.The International C2 Journal,2009,3(2):1–59.
[20]NISSEN M E.Enterprise command,control,and design:bridging C2 practice and CT research.Monterey,CA:Naval Postgraduate School,2007.
[21]STERBENZ J P G,HUTCHISON D,C¸ETINKAYA K E,et al.Resilience and survivability in communication networks:strategies,principles,and survey of disciplines.Computer Networks,2010,54(8):1245–1265.
[22]DEKKER A.Studying organisational topology with simple computational models.Journal of Artificial Societies&Social Simulation,2007,10(46):1–13.
[23]SCHEIDT D,SCHULTZK.On optimizing command and control structures.Laurel,MD:Johns Hopkins University,2011.
[24]FRIMAN H,HORNE G E.Using agent models and data farming to explore network centric operations.Proc.of the 37th Conference on Winter Simulation,2005:1094–1100.
[25]PERRY W,SIGNORI D,BOON J.Exploring information superiority:a methodology for measuring the quality of information and its impact on shared awareness.Santa Monica,CA:RAND Corporation,2004.
[26]PAPAGEORGIOU E I.Fuzzy cognitive maps for applied sciences and engineering.Berlin:Springer,2014.
[27]CHENG J,ZHANG X W,XU J,et al.Human/unmannedaerial-vehicle team collaborative decision-making with limited intervention.Acta Aeronautica et Astronautica Sinica,2015,36(11):3652–3665.(in Chinese)
[28]HUANG H M,MESSINA E,ALBUS J.Autonomy levels for unmanned systems(Alfus)framework volume II:framework models.Gaithersburg,Maryland:NIST Special Publication,2007.
[29]WANG W,TANG C Y.Distributed computation of node and edge betweenness on tree graphs.Proc.of the 52nd IEEE Annual Conference on Decision and Control,2013:43–48.
[30]NOWICKI E,SMUTNICKI C.A fast tabu search algorithm for the permutation flow-shop problem.European Journal of Operational Research,1996,91(1):160–175.
杂志排行

Journal of Systems Engineering and Electronics的其它文章
- Algorithm for source recovery in underdetermined blind source separation based on plane pursuit
- Improved pruning algorithm for Gaussian mixture probability hypothesis density filter
- Weak GPS signal acquisition method based on DBZP
- Self-adapting radiation control method for RFS in tracking
- Constructions for almost perfect binary sequence pairs with even length
- Multi-sensor optimal weighted fusion incremental Kalman smoother