基于惯性导航的室内定位系统设计
——卡尔曼滤波器在室内定位的应用
2018-04-27李耀岳牛长流王迪聂权华玟北方工业大学
李耀岳 牛长流 王迪 聂权 华玟 北方工业大学
1 研究背景
在移动互联时代,人们可以随时随地的接入到互联网中进行信息交互,这使得人们对于信息提供的及时性和原属地有了更高的要求,因此,基于位置的服务(LBS,Location Based Service)被广泛的应用到了各类移动网络系统中。
目前的定位服务主要有两种提供方法,一种是使用全球卫星定位系统(GPS, Global Positioning System),通过全球同步卫星提供覆盖全球的空间定位。另一种基站定位的方法,则是使用无线蜂窝网络,通过无线基站台的坐标进行定位预估。
2 室内定位的方法
针对无线定位技术的研究,必须通过基于传播过程的定位方法,基于传播过程的定位方法有很多,常用的有基于电波传播时间(TOA:time of arrive)、基于电波传播时间差(TDOA:time difference of arrival)、基于到达角度的定位(AOA:arrival of angle)和基于接收信号强度(RSSI:received signal strength indication)等。
2.1 基于电波传播时间 ( TOA:time of arrive )
TOA方法主要测量无线信号在AP和移动终端之间的单程传播时间或者收发一次的来回传播时间。前一种方法要求AP或移动终端台能记录信号发出的准确时间,并且接收终端也同样对时钟有着十分高的要求,这样才能保证单程传播时间的记录;后者则不要求AP和移动终端间的同步是一种测量传播时间十分常见的方法,要得到单程的时间就将测得的结果除以2即可,但是同样对时钟的精确度有着十分高的要求。
2.2 基于电波传播时间差 (TDOA : time difference of arrival)
TDOA(到达时间差)是通过检测无线信号到达两个AP的时间差,而不是到达的绝对时间来确定移动终端的位置,显然,这样做的目的是降低对收发两端时间同步的要求以及时间测量精度的要求。采用三个不同的AP就可以测到两个TDOA值,移动终端就位于两个TDOA决定的双曲线的交点上。
TDOA法要求用户与基站之间达到实时同步,这加大了系统的成本,使得大范围普及应用较为困难。
2.3 基于到达角度的定位 (AOA: arrival of angle)
在基于到达角度AOA的定位机制中节点通过天线阵列或多个超声波接收机感知来自待定位节点信号的到达方向,计算接收节点和发射节点之间的相对角度或方向,再通过几何法则计算出节点的位置。AOA法利用方向性天线来判断信号源的方向,当接收到两个以上已知发射端的方向角度后,就可以利用发射端和接收端的相对角度估算出待定位移动台的位置,此方法估测精度虽然高,但由于需要额外的天线架设,所以成本偏高,难以实际应用。
2.4 基于接收信号强度 (RSSI:
signal strength indication)
研究测量及实验表明,无线信号在传播过程存在以下规律:在AP发射功率一定的情况下,接收方接收到的信号强度与收发双方的距离成一定反比关系,收发双方距离越近,接收方收到的信号强度越强,反之则接收到的信号强度越弱。RSSI方法就是通过已知的电波传播模型由移动终端测量来自几个AP的信号强度值,利用三个或三个以上信号强度值转化成到已知基站的距离值来对移动终端进行定位,一般通过3个AP就可以确定移动终端的位置。
3 卡尔曼滤波器算法
卡尔曼滤波是以最触均方误差为估计的最佳准则,来寻求一套递推估计的算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻的估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。它适合于实时处理和计算机运算。
3.1 状态方程建立
所用接收系统给出的是在地理坐标系中的经度、纬度和高度值。一般要先将地理坐标系转换为地球直角坐标系,并依次定义描述接收机在3个坐标轴的位置、速度、加速度、误差等信息。

分别为机动状态载体在3个坐标轴上的位置、速度、加速度和位置误差。通常采用一阶马尔科夫过程表示各个位置误差,总位置误差可看作有色噪声,则可表述为


3.2 观测方程的建立

其中的观测矩阵可表示为

由建立的方程得知,这是一个可观测的线性卡尔曼模型。
3.3 自适应卡尔曼滤波方程的建立
通过上述方程,可建立卡尔曼滤波方程如下
其中,


式中,Q(k)阵为系统的噪声协方差阵,Q的离散化矩阵。
方程中λ(k+1)是引入的遗忘因子,可用来限制卡尔曼滤波器的记忆长度,改善滤波器的动态性能。卡尔曼滤波器是高斯过程最优滤波的一种有效算法,当对象模型足够准确,且系统状态和参数小,发生突变时,性能较好。但当模型存在误差,及系统状态和参数发生突变时,这种增长记忆滤波使“过老”的测量数据对现时的状态估计产生不良影响,甚至可能发散,从而影响滤波器的动态性能。
3.4 实验结果和分析
3.4.1 实验环境
本文定位的试验场地为北方工业大学博远楼九层,该环境为典型的室内办公环境,部署了定位所需的AP。
3.4.2 实验结果
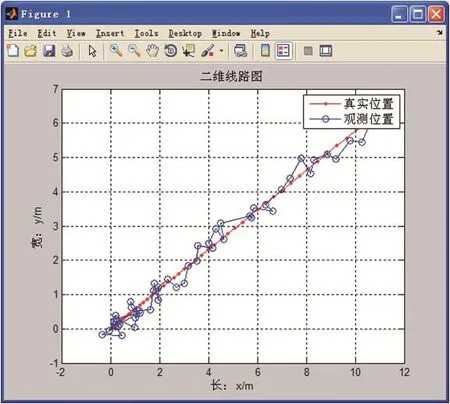
图1 真实位置与观测位置
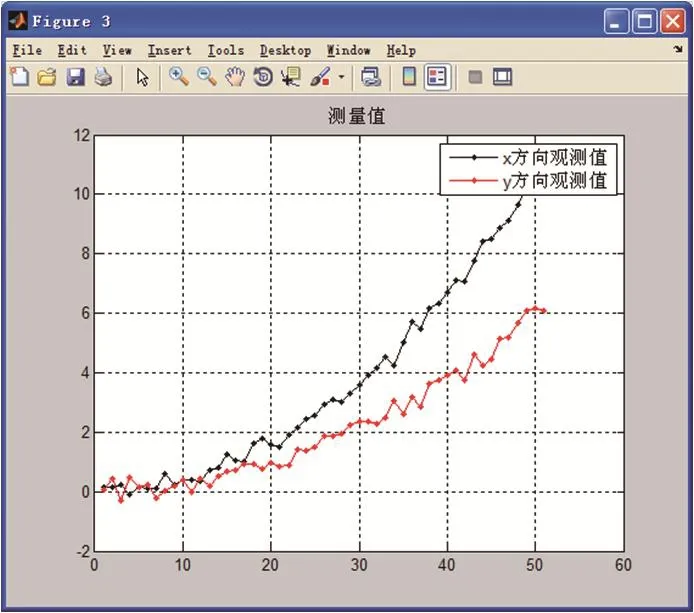
图2 x方向y方向测量值
Matlab仿真的匀加速运动的机器人真实、观测位置信息,仿真产生的x、y方向的观测位置信息,用Matlab仿真卡尔曼滤波算法,并用其对观测位置信息滤波。
4 结论
采用伪线性卡尔曼滤波算法,在参数估计的收敛速度和收敛精度上有明显的改善,在很大程度上克服了非线性问题线性化时,线性化误差导致的不良结果。通过伪量测变量的引入,对量测矩阵进行重新构造, 使得系统量测矩阵是量测角的函数,并且具有线性形式。该算法降低了对模型精度的要求,改进了扩展卡尔曼滤波的发散问题,具有较好的稳定性,在一定的误差范围内可以快速实现对空间目标定位。但伪线性卡尔曼滤波算法存在稳态有偏估计的问题,这有待于进一步研究解决。
[1]王睿.基于多传感器融合的定位系统设计与实现[D].北京:北京邮电大学.2012.
[2]胡天琨.基于 A n d r o i d 的室内导航定位系统设计与实现[D].上海:东华大学.2012:
[3]吴建华,李迟生,周卫星.中值滤波与均值滤波的去噪性能比较[J].南昌大学学报:工科版, 1998,20(1):32-35.
[4]赵永翔,周怀北,陈淼,等.卡尔曼滤波在室内定位系统实时跟踪中的应用[J].武汉大学学报:理学版,2009,55(6):696-700。