GPS软件接收机码跟踪环的参数设计
2018-04-25孙慧萍王利红田秀桃
孙慧萍,张 丽,王利红,田秀桃
(山西大同大学物理与电子科学学院,山西大同037009)
GPS是全天候无线电定位、定时系统。跟踪技术是其关键技术之一,跟踪的实现包括载波跟踪环和码跟踪环[1-3]。在高动态时,由于多普勒频移,会产生很大误差[4,5]。为了解决这个问题,本文采用了二阶DLL跟踪环路。
1 GPS码跟踪环软件的实现
当载波跟踪环路已经同步时,采用DLL码跟踪环路如图1所示。
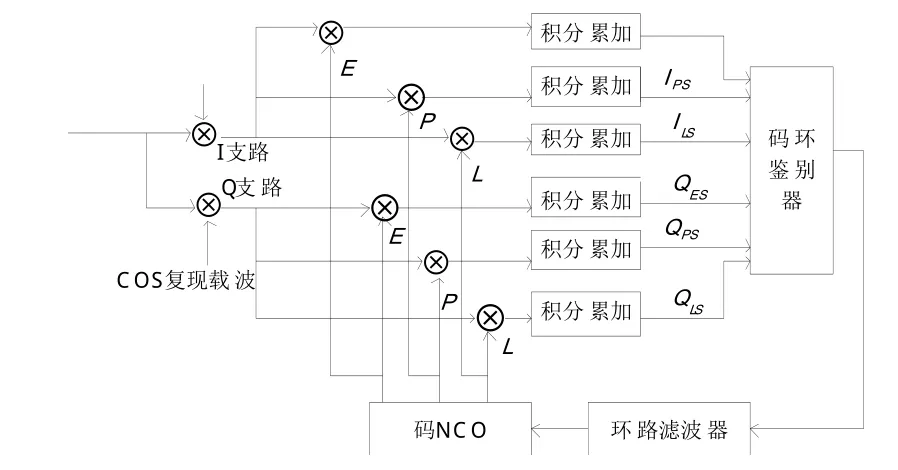
图1 码跟踪环[1,2]
GPS信号是伪随机码扩频的BPSK调制信号,将接收到的GPS信号和载波跟踪环产生的本地载波相乘(可去除掉载波这一部分),得出解扩后的码跟踪环输入信号(不包括噪声):

式中,ac为接收的GPS信号幅度,C(t)为C∕A码,D(k)为GPS数据码。
设超前路与滞后路之间的码相关间隔为2d,d是相关间隔的一半(超前路与滞后路分别到即时路的相关间隔)。码相位调整必须在一个数据位(20 ms)内进行,因此分析时可忽略数据符号的影响。经过本地伪随机码的解调后积分累加,随后送入伪随机码跟踪环鉴别器的信号跟估计频差和相差有关,六路累加相关值表达式为:

式中,ε(i)表示码相位误差,R[ε(i)]表示码相关函数,A表示相关后的幅值,Δfd()i为多普勒频差,Ti表示预检测积分时间,Φi表示初始相位。
即时码、超前码和滞后码通过伪随机码环鉴别器,得到GPS信号与本地伪随机码的频差和相差。再通过伪随机码环路滤波器,滤除掉高频分量、带外干扰。滤波之后的信号用以控制伪随机码NCO产生更新的本地伪随机码。要经过多次调整,使伪随机码NCO产生的本地伪随机码尽可能和GPS信号的伪随机码同频同相,完成跟踪。
2 GPS码跟踪环的设计
2.1 鉴别器
该文采用归一化超前减去滞后包络[1-2],它的鉴别器表达式为:


式中,Δp(i)为第i时刻鉴相器输出,ε(i)为码相位误差,R[ε(i)]为码相关函数,d为码相关间隔,IE、QE、IL、QL为累加相关值。
2.2 环路滤波器
在载波环路辅助下,码环经常采用一阶或者偶尔采样二阶滤波器[2]。在高动态的应用领域,该文采用二阶的DLL环路。可精确到-1.5~1.5码元内的误差和无偏的跟踪常数加速度,如图2所示。
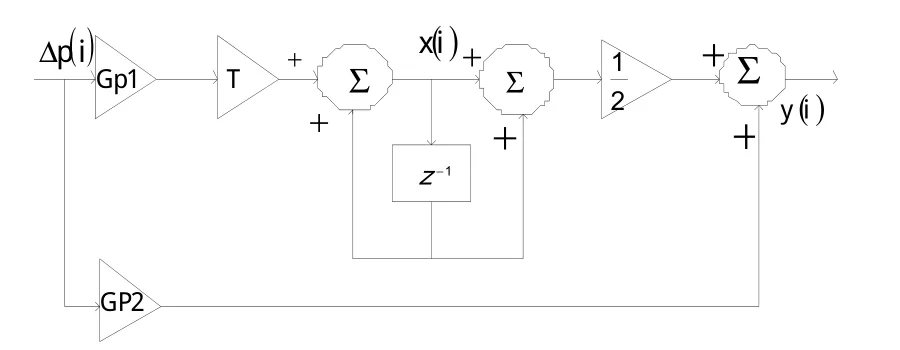
图2 码跟踪环路滤波器
码跟踪环路滤波器输出表达式如下:

式中,Δp(i)为输入,y(i)为输出,Gp1和Gp2为滤波器系数,T为预检测积分时间,x(i)为中间变量。
2.3 码NCO
码环NCO的时钟速率是由载波环辅助和本地标准码速率来确定的。其原理框图如图3所示。

图3 码环NCO
3 GPS码跟踪环参数的选取
GPS软件接收机一般工作在不同的动态环境下,对滤波器带宽及码环路频率的更新时间进行分析,选择最合适的参数值,保证码环路能够正常工作。
3.1 码跟踪环路带宽
该文采用的是DLL跟踪环路[3]。在GPS软件接收机码跟踪(DLL)中,测距的主要误差源是动态应力误差和热噪声距离误差抖动。DLL经验方法门限是由环路所有的误差源造成的抖动的3σ值不允许超过鉴别器线性牵引范围的一半[1]所计算的。经验方法的跟踪门限为:

式中,σtDLL是1σ热噪声码跟踪颤动(chip),Re是DLL跟踪环的动态应力误差(chip),D是超前减滞后相关器间距(chip)。
1)载波环辅助的码跟踪环
动态应力误差的影响会随着载波环辅助而消除。只要载波环稳定,码环经受的动态应力误差可忽略。在分析码跟踪门限时,只要考虑热噪声距离误差颤动就行。BPSK-R(n)调制,比如C∕A(n=1)码,如果采用非相干超前减滞后功率型DLL鉴别器时,就可以得出以下公式:
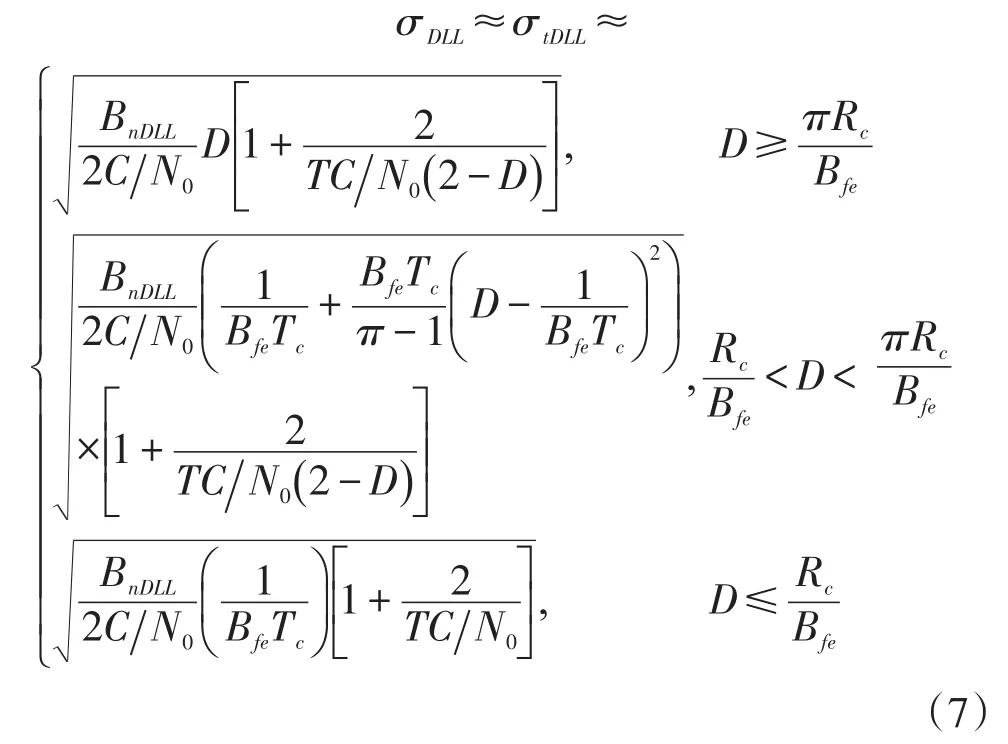
其中,BnDLL表示码环的噪声带宽(Hz),C/N0表示信号的信噪比(dB-Hz),T表示预检测积分时间,Rc码片速率,Bfe表示双边钱端带宽,Tc表示码片周期。
取D=1,BfeTc=2,则时,满足化简为:

根据经验公式1σDLL门限值为可得到噪声带宽与热噪声误差的关系如图4所示。
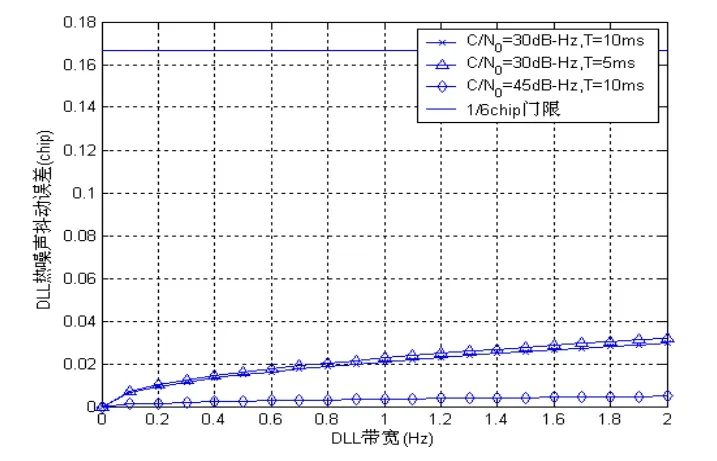
图4 热噪声误差随带宽变化
由图4可以看出,噪声带宽增宽就会引起热噪声误差变大。信噪比越大,相应的热噪声越小。热噪声误差受预检测积分时间的长短的影响不大。
2)不采用载波环辅助的码跟踪环
不采用载波环辅助,动态应力误差就不能忽略,则主要误差源是热噪声距离误差抖动和动态应力误差。对于BPSK-R(n)调制,如C∕A(n=1)码,当采用非相干超前减滞后功率型DLL鉴别器时,取码环是个3阶C∕A码DLL,D=1,BfeTc=2,取为35,T=5 ms,最大的视线方向加加速度应力为ω0=BnDLL∕0.7845,d3Rdt3=98m∕s3293.05m/码片 =3.344,则
计算得BnDLL≤0.2 Hz。
在实际中,一般都会采用载波辅助的码环。那么要根据具体情况选择合适的噪声带宽,使得误差越小越好。
3.2 环路频率的更新时间
码环更新频率fDLLup由C∕A码的多普勒频率fdc、信号的采样频率fs以及时钟速率fc所决定,它们之间的关系为:

如果设C∕A码的多普勒频率8.0 Hz,采样频率5 MHz,那么引起半个采样间隔(100 ns)的移动时间是12.78 ms(100×1 ∕8.0∕977.5)。

所以,高速运动的接收机码跟踪每12.78 ms就必须检测一次输入信号和本地C∕A码的对准情况。
4 总结
该文首先分析了GPS码跟踪环的软件实现,然后给出了GPS码跟踪环的设计,最后讨论了码环路带宽和码环路频率更新时间参数的选取,为以后进一步研究GPS码跟踪环奠定了一定基础。
[1]Nesreen I,Ziedan.弱信号全球导航卫星系统接收机[M].张欣,译.北京:国防工业出版社,2008.
[2]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009:266-388.
[3]Kaplan E D.GPS原理与应用[M].寇艳红,译.北京:电子工业出版社,2007.
[4]刘俊成.GPS软件接收机关键技术研究[D].北京:国防科学技术大学,2006.
[5]Frederic Bastide,Oliver Julien,Christophe Macabiau,et al.Study of Acquisition,Tracking and Data Demodulation Threshold[C].ION GPS 2002.
