智能小车在车路协同实验教学中的应用研究
2018-04-24田杰
田杰
摘 要 车路协同实验课程是智能交通相关专业必修课,具有覆盖知识面广的特点。针对学生对实验教学环节学习积极性不高的问题,将智能小车引入实验教学,设计车路协同实验项目,选择智能小車各个模块型号,提出具体的实验考核标准。结果表明,在一定程度上提高了学生的学习积极性,达到了培养学生动手能力和创新能力的目的。
关键词 智能小车;车路协同系统;传感器;无线通信;ZigBee
中图分类号:G642.423 文献标识码:B
文章编号:1671-489X(2018)20-0119-02
1 前言
车路协同系统(Cooperative Vehicle-Infrastructure System,CVIS)是指采用先进的传感器探测、无线通信等技术手段,通过对交通信息采集与融合,实现车辆主动安全控制与道路协同管理,对缓解道路交通拥堵,提高交通安全水平具有极其重要的作用[1],是智能交通系统研究的必经阶段,也是目前智能交通领域研究的热点之一[2]。鉴于CVIS对交通领域具有极其重要的作用,国内也在相应高校的交通工程、交通设备与控制工程等专业开设了车联网技术、智能交通系统、车路协同系统等课程。
目前,车路协同实验教学主要通过软件仿真、教师课堂讲解以及演示系统来提高学生对于CVIS的认识[3],由于实验内容比较枯燥、死板,学生对实验兴趣不高,收益甚微,严重限制了学生解决问题思维、创新性能力的培养。针对目前实验教学的不足,将智能小车引入实验教学,让学生通过对智能小车的学习、研究、开发,促进学生掌握传感器技术、通信技术、车路协同等原理,在增强实验趣味性的同时,提高学生的学习积极性和科学探索精神。
2 实验项目设计
针对学生个性特征和认知水平差异,为保证每位学生通过实验都有所收获,能力有所提升,将实验项目划分为基础实验部分和提高实验部分,实验项目覆盖红外、超声波等传感器技术,ZigBee、蓝牙等通信知识,项目内容由浅入深,适合所有学生的学习情况。
基础实验项目设计 基础实验项目主要培养学生的动手能力,熟悉常见传感器和通信器件的工作原理和使用方法。该部分实验较为容易,每个团队都能独立完成实验,激发学习兴趣,感受完成实验项目带来的乐趣,提高学习积极主动性。该部分实验项目包括以下内容。
1)智能小车安装与调试。学生通过制作PCB板、焊接电路,掌握PCB焊接技巧、电路调试方法;通过对小车的调
试,巩固常见传感器、无线通信的基础知识,熟悉各类元器件工作特性,为今后的工作和学习打下坚实基础。
2)智能小车巡线控制。运用Keil软件编程实现智能小车寻迹运动,为学生提供常见的PID控制算法,让学生通过对硬件的调试和软件的编写,熟悉开发环境,掌握电机转速控制、舵机转向控制的原理。实验要求智能小车能沿着白色或黑色轨迹运动。
提高实验项目设计 提高实验项目意在提高学生分析与解决问题的能力,培养学生知识综合应用能力、创新能力。实验项目为学生提供实验大致方向,不再提供具体的实验步骤,学生通过对所学知识进行创新和发挥,网络查询相关资料完成实验项目。该部分为学生提供了三个参考实验项目。
1)车车通信实验。通过实验使学生深入了解无线组网技术,加深对车车通信的理解,掌握运用传感器技术实现车辆信息的采集、处理,应用ZigBee技术完成车车之间无线组网和信息共享。要求实现车与车之间速度共享,小车运动轨迹跟踪。
2)自适应巡航控制。通过对超声波测距传感器、红外测距传感器的使用,学生完成自适应巡航控制算法,要求掌握自动控制、电机加速和巡航算法,最终实现车跟车控制、前车紧急制动、车与车间距实时测量的功能。
3)环境识别实验。环境识别是实现无人驾驶的关键技术之一,采用价格较低的视觉传感器进行交通环境感知,通过实验,学生可以掌握单片机AD转换、读取摄像头信息、图像处理基本方法,最终实现车道线判定、红绿灯识别功能。
3 智能小车系统设计
从技术角度来讲,智能车路协同技术是应用最新的技术如计算机仿真、可信计算、下一代互联网、传感网络、通信及信息技术等实现道路设施与车辆的信息化共享和智能化管理,及时获得可靠的交通安全信息,提高交通安全性和通行效率。系统主要包括三部分:通信平台、智能路侧系统、智能车载系统。其中智能车载系统主要对周围环境及车辆自身的状态信息进行感知;智能路侧系统主要监测道路的情况、道路异常、道路几何状况及车流量、平均车速等信息;通信平台则负责整个系统的通信,是车载单元与路侧设备之间的交互。
智能车辆关键技术主要室实现车辆的硬件改造,从两个方面进行:一是通过加装激光雷达车载单元、电子罗盘、陀螺仪、GPS等采集车辆的姿态信息、位置信息及行车环境等信息;二是通过工业控制计算机等安装控制设备实现车载单元的智能控制,可以规避一些危险、紧急情况。
智能路侧系统部分包含的关键技术包括硬件和软件两方面,主要实现多通道交通信息采集、多通道路面状态信息采集、信息融合及突发异常事件快速识别与定位、多模无线数据传输等功能。
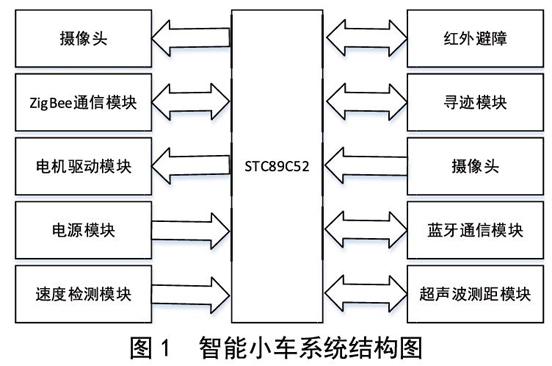
智能小车硬件结构框图如图1所示,以STC89C52单片机为微控制器,超声波测距模块、电机驱动模块、红外寻迹模块与微控制器通过IO口连接,实现与障碍物间距测量、防碰撞、控制小车运行的功能;ZigBee通信模块、蓝牙通信模块与微控制器间串口连接,实现车车通信信息共享及与手机APP进行通信,控制小车运行。
寻迹模块设计 寻迹模块采用ST188型红外光电对管,其发射器是砷化镓红外发射二极管,接收器是高灵敏度的光电三极管,检测距离4~13 mm可调。利用黑、白色对光线吸收强度不同的原理,当检测为黑线时,发射管发射的光线大部分被黑线吸收,反射光线较弱,不足以驱动光敏三极管,此时三极管无法导通,输出为高电平;检测为白色平面时输出为低电平,通过判断输出电平的大小控制舵机的转向,即可完成智能小车黑白寻迹。
超声波测距模块设计 超声波传感器发射头利用逆压电效应将单片机产生的40 kHz方波信号转化为超声波信号,接收头通过压电效应将接收到的超声波信号转化为电信号,单片机记录发射时间t1和接收时间t2,即可通过公式D=c(t2-t1)/2求取与障碍物之间的距离[4]。式中D为距离,c为声速。超声波接收器输出信号为毫伏级的电压,不能直接被单片机识别,需要前置放大电路,前置放大器选用高集成度的CX20106,其完成对接收信号的放大、滤波,最大增益可达80 db输出信号。
组网通信模块设计 车车通信的组网技术采用ZigBee技术,芯片选用CC2530F256,该芯片具有256 kB的Flash存儲空间和8 kB的RAM,工作频段2.4 GHz,内部集成一个MAC定时器、8路输入12位模数转换器,能独立工作,具有功耗低、互操作性强、多个节点之间组网便捷的优点[4]。通过串口与单片机连接,将控制信息通过无线方式在各个模块之间进行传输,从而实现信息共享和相互控制。
软件设计 软件设计采用模块化设计原则,每个模块功能程序独立设计,将程序以头文件形式提供给学生,根据所选设计项目功能,快速查询对应的程序代码,通过查询传感器和通信芯片手册进行学习,可以在有限的时间内完成任务,提高学习积极性,将更多的时间投入小车功能设计。
4 实验项目考核与验收
为了科学、全面、准确地考查学生的实验能力和评价学生的实验效果,使学生重视实验教学环节,最终以学生答辩的方式进行实验项目验收。答辩环节要求小组成员讲解设计实验项目所使用的元器件工作原理、实验过程遇到的问题及解决思路,现场演示设计项目的功能,并针对该门实验教学存在的不足提出建议。考核具体标准如下。
1)实物验收:每组成员展示组装的智能小车,通过判定小车的安装布局、焊接技术、小车寻迹准确性、小车运行速度给予评分,占总成绩的30%。
2)项目创新:根据所选实验项目,演示智能小车的功
能,通过判定设计系统运行效果、选题难度、自主创新给予评分,占总成绩的30%
3)项目答辩:由组长讲解实验项目设计思路,团队成员辅助回答各个模块的工作原理,锻炼学生的语言表达能力,占总成绩的20%。
4)实验报告:以论文的形式书写实验报告,让学生锻炼写作能力的同时,也为以后毕业设计的排版和写作打下良好基础,占总成绩的20%。
5 总结
车路协同系统是目前智能交通领域的研究热点,实验教学环节着重培养学生的创新意识和知识应用能力。针对学生基础能力不同,将实验项目划分为难度不一的实验,提供实验所需模块和对应的参考资料,保证每位学生都能在规定时间内完成实验项目,提高学习积极性。将智能小车引入实验教学,学生课堂玩手机、打瞌睡现象明显减少,为学生参加全国飞思卡尔比赛、交通科技大赛奠定良好基础。■
参考文献
[1]贾鹏,冯明月,张志超.智能车路协同系统发展现状与趋势[J].军事交通学院学报,2014,16(2):39-42.
[2]张立立,杨文谷,李大宇,等.基于开放实验培养学生创新思维模式的探索[J].实验技术与管理,2016,33(7):29-32.
[3]孙剑,吴志周.车路协同系统一体化仿真实验平台[J].实验室研究与探索,2014,33(2):75-78,111.
[4]张萍.超声波避障智能小车的设计[J].自动化仪表,
2017,38(9):40-43.
