协作机器人在检测平台上的安全控制
2018-04-23毛久勇
毛久勇
(国家电投集团远达环保催化剂有限公司,重庆 401336)
工业机器人在全球制造业得到广泛应用。这么多年,人们一直在研究避免机器人和其周围的设备可能对工人造成的危害。常规的措施会将机器人锁在安全防护栏内,预防机器人和工人接触[1-3]。然而,协作机器人则需要和工人在同一区域共同参与组装工作,因为工人和机器人在一天中会有很多合作,协作机器人的出现使得常规的安全防护失去意义,工人的安全问题得依靠传感器和控制程序来解决[4-7]。
1 工作原理
检测员位于检测平台安全区域时,机器人负责将传输皮带A上的产品搬运到检测平台位置1处,放好产品后机器人运转到安全位置等待运行命令。检测员前往检测平台检测产品的质量,检测完成后将产品放到检测平台位置2处,然后检测员后退离开检测区域。检测员进入安全区域后,机器人运行到检测平台位置2处,将产品搬运到传输皮带B上。检测员和机器人不断地重复整个工作过程。检测平台工作流程如图1所示。
在机器人区域中,有两个区域需要工人和机器人都参与工作,而不是同时参与。这对于工业机器人来说是一个复杂部件。可以用一个安全光幕进行区域扫描,监控人类员工的位置,当工人进入特定区域时不让机器人进入。
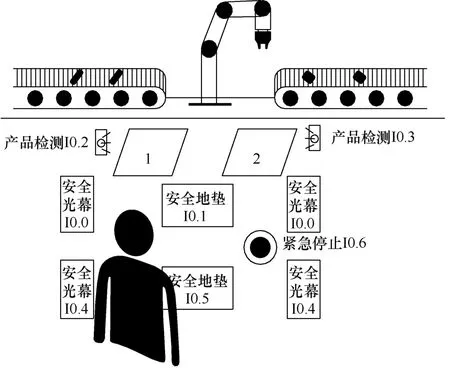
图1 检测平台工作流程图
2 控制系统硬件组成
控制系统组态西门子S7-300PLC为主站,ABB公司IRC5系列6640机器人为DP从站,主从站之间采用西门子的Pro-Bus总线通信[8]。控制系统硬件组态如图2所示。
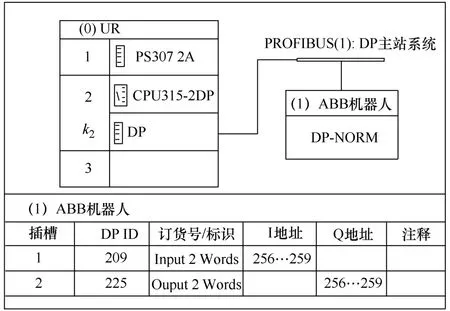
图2 控制系统硬件组态图
3 I/O分配
ABB机器人通过总线适配器DSQC667连接到主站CPU,西门子PLC的组态中为机器人分配了两个字的I/O地址,主站PLC通过输出地址Q256.0-Q259.7对机器人进行控制,通过总线传送到机器人的输入信号BOARD11地址0-32;机器人的输出指令为BOARD11上0-32位地址,通过总线传送给主站PLC的I256.0-I259.7地址区。I/O分配情况见表1。

表1 I/O分配表
4 程序设计
4.1 主站PLC程序设计
根据检测员和机器人的整个工作流程,设计了主站PLC程序。设备处于自动模式且紧急停止没有被按下时,检测员在检测平台位置检验产品的过程中,脚下的安全地垫和检测平台位置的安全光幕信号处于导通,这时机器人的运转使能信号处于断开状态;相反,检测员检测完产品回到安全位置的安全地垫上,主站发送信号允许机器人运行。主站PLC程序图如图3所示。

图3 主站PLC程序图
4.2 ABB机器人程序设计
主站PLC的输出信号Q256.0通过总线传送到机器人的使能运行输入信号 I_RobotRunEnabling,根据机器人运行的安全流程,在机器人主程序中加入中断程序监控指令,机器人检测到输入信号I_RobotRunEnabling为低电平时触发中断程序,机器人执行中断程序中的停止命令和等待运行命令。当机器人输入信号 I_RobotRunEnabling为高电平时,机器人程序指针离开中断程序恢复正常的逻辑运行[9-11]。机器人中断程序如图4所示。
在机器人程序编辑器中创建中断连接程序PROC LinkIR(),定义输入信号I_RobotRunEnabling对应的中断名称为IR_RobotRunEnable,定义中断名称 IR_RobotRunEnable连接中断陷阱程序T_RobotRunEnable,中断子程序T_RobotRunEnable写入机器人停止命令和等待运行命令。创建一个子程序PROC IWatchIRs(),该程序用于打开中断监控,然后在主程序 main()中调用子程序 PROC IWatchIRs(),当机器人输入指令I_RobotRunEnabling为0时,机器人立即停止;反之,机器人运行。
5 结论
将协作机器人应用于人工检测平台完成工作的想法,最初在负责工作安全的人看来是很复杂的。但是将操作分解到不同的顺序步骤后,整个过程就变得可以管理,也相信了协作机器人的安全性。协作机器人在检测平台上的安全控制在实际中得到了应用,实践证明效果好,安全可靠性高。最大的优点是减少了工人的人员配置,并降低了工人的劳动强度。

图4 机器人程序
[1] 戈斌斌, 毛新军. 基于行为检测的机器人安全保护方法[J]. 计算机科学, 2016, 43(8): 183-189.
[2] 林远长, 陈震宇, 徐泽宇, 等. 对现行GB/T 20867—2007《工业机器人安全实施规范》标准的分析及修订建议[J]. 中国标准化, 2015(12): 108-112.
[3] 贝加莱工业自动化(上海)有限公司. 机器人安全技术[J]. 国内外机电一体化技术, 2015, 18(5): 29-31.
[4] 姜华. 协作机器人控制系统的研究与实现[D]. 北京:北方工业大学, 2017.
[5] 张浩. 地面移动机器人安全路径规划研究[D]. 芜湖:安徽工程大学, 2015.
[6] 吴国魁. 工业机器人的碰撞辨识与安全控制[D]. 福州: 福州大学, 2014.
[7] 贾菁辉. 移动机器人的路径规划与安全导航[D]. 大连: 大连理工大学, 2009.
[8] 刘华波, 何文雪, 王雪. 西门子S7-300/400PLC编程与应用[M]. 北京: 机械工业出版社, 2012.
[9] ABB. Instructions R. Functions and data types[Z].2011.
[10] ABB. RAPID语言概览[Z]. 2015.
[11] ABB. RAPID语言内核[Z]. 2015.
