基于频谱残差视觉显著计算的高分辨SAR图像舰船检测算法
2018-04-19徐永力姚力波崔亚奇李岳峰
熊 伟, 徐永力, 姚力波, 崔亚奇, 李岳峰
(海军航空大学信息融合研究所,山东 烟台 264001)
0 引言
合成孔径雷达(SAR)具有全天时、全天候、大范围等特点,是海洋监测与监视应用的重要组成部分,其中舰船目标检测日益成为研究热点。SAR图像舰船目标检测作为其分类和识别的基础,始终是SAR图像应用的重要方面[1]。
随着Radarsat- 2,Terra-SAR-X以及高分三号等新一代SAR传感器的发射运行,SAR逐渐向高分辨率、大幅宽、多极化方向发展。随着图像尺寸越来越大,基于图像的逐点计算等检测算法处理速度就变得缓慢,难以达到实时处理的要求[2]。大数据量的SAR图像信息和有限的计算机处理能力之间的矛盾,迫切需要寻求快速的图像检测方法[3]。另一方面,SAR场景的图像质量越来越接近同类用途的光学图像,图像所呈现出的特性更加突出,因此越来越多的学习方法可用来对SAR图像进行分类。一些学者对人类视觉智能展开研究并取得进展,其中采用视觉注意机制从复杂的视觉信息中筛选出有用信息提供给目标检测,大大提高了处理效率。
目前舰船检测算法主要包括恒虚警率(Constant False Alarm Rate,CFAR)及其改进算法[4-5]、SUMO算法[6]、KSW算法[7]等。CFAR检测仍是应用最为广泛的方法,其中智能CFAR检测在对多目标、非均匀杂波等复杂环境目标检测时取得不错效果[8]。智能CFAR检测需要进行背景杂波统计建模,通常需要检测预处理去除图像中高亮像素,如基于自动筛选的智能CFAR算法[5]等目标检测算法。此类方法大多需要大量先验信息以确定筛选深度,这通常在取得较好的检测效果和较少的运算量之间存在矛盾。其次,这类智能检测方法在杂波背景建模阶段的筛选无法避免一些灰度值较低的目标像素被判断为背景,导致参数估计的准确性不高[9]。
借鉴智能CFAR检测的处理机制,结合人的视觉显著检测理论,本文提出一种基于计算机视觉的检测算法,首先利用视觉显著注意的方法在全局范围内快速地筛选得到显著性区域,然后使用局部检测算子进行目标检测。
1 基于视觉显著注意的检测理论
虽然近年来计算机视觉的研究已经取得很大发展,获得了一系列成果,但是人眼的视觉系统对于现实场景的信息分析及处理能力依旧更为高效。因此学者们不断地研究人的视觉注意机制,并尝试提出数学计算模型进而模拟人类视觉的注意机制。目前较为常用的视觉注意计算模型[10]有:ITTI视觉注意计算模型和AIM视觉注意计算模型以及基于傅里叶变换的频谱残差视觉注意计算模型。
考虑到前两种视觉注意计算模型计算复杂度较高,不利于实际的实时应用系统的构建,尤其是其应用于高分辨率宽幅SAR图像这类大数据量图像检测时,模型难以实时有效地提取显著图。
通常得到一种实时性好的显著性区域检测算法需要采用全局搜索方式,这也减轻了局部遍历的搜索代
价[5]。文献[11]提出了一种基于图像频域的视觉显著性区域提取方法,即频谱残差法(Spectral Residual,SR)。与其他计算模型相比,SR方法是一种全局的显著性区域提取算法,模型基于频域处理,采用快速傅里叶变换实现,具有计算简单和快速的优点。方法的基本思想为:大多数自然图像的对数幅度谱具有近似相同的形状,因此一幅图像的频谱中有别于相同形状的部分即是蕴含着目标信息的频谱残差部分。
假设I(x)为一幅图像,图像的频谱FFT[I(x)]分解成幅度谱A(f)和相位谱P(f)两部分,即
A(f)=Amp{FFT[I(x)]}
(1)
P(f)=Pha{FFT[I(x)]}。
(2)
通过一个低通滤波器与图像的对数幅度谱进行卷积,将该幅度谱平滑处理,与原图像的对数幅度谱作差求出频谱残差。结合已得到的频谱残差和相位谱,得到原图像的视觉显著图。频谱残差的计算过程为
L(f)=lg[A(f)]
(3)
R(f)=L(f)-hn(f)*L(f)
(4)

(5)
式中:FFT和FFT-1分别表示图像的快速傅里叶变换及其逆变换;hn(f)表示频域中的低通滤波器,如均值滤波器;g(x)表示空域中的低通滤波器,可采用一个高斯平滑滤波器;A(f),P(f),L(f)分别是原始图像的幅度谱、相位谱、对数幅度谱;R(f)表示频谱残差;S(x)为显著图。
在计算频谱残差时,图像的相位谱是计算显著图的关键。相对于对数幅度谱,相位谱是真正对于显著图具有实质贡献的部分,依据这点对频谱残差法进行改进。新的视觉显著计算模型为
(6)
RM(f)=BP(f)·PM(f)
(7)
SM(f)=FFT-1[RM(f)]
(8)
式中:BP(f)指带通滤波器,本文选择中心频率为f0、截止频率为Δf的高斯滤波器;PM(f)是原图像相位谱;RM(f)表示频谱残差;SM(f)为显著图。改进后的频谱残差显著性计算模型主要包括原始频谱的归一化处理和频域带通滤波两步运算。
相比之前的频谱残差法,改进的频谱残差法无需进行对数幅度谱计算和低通滤波,频域的指数运算以及空域的高斯滤波,大大提升了计算速度。改进方法包含的2个控制参数f0和Δf,可依据目标特性进行调整,此计算模型具有一定适应性。通过实验对改进前后的计算模型进行对比分析。
通过人眼观察实验数据可以看出,图1中改进前后所得到的SAR图像显著图在视觉感受上非常相近。通过图2进一步验证:两种显著图的残差取值随机分布于区间[-1,3],在进一步说明了两种显著图相似性的同时,发现在舰船目标存在的坐标附近灰度差值更加突出。因此可以得出结论,新的频谱计算方法在一定程度上提高了目标的信杂比。
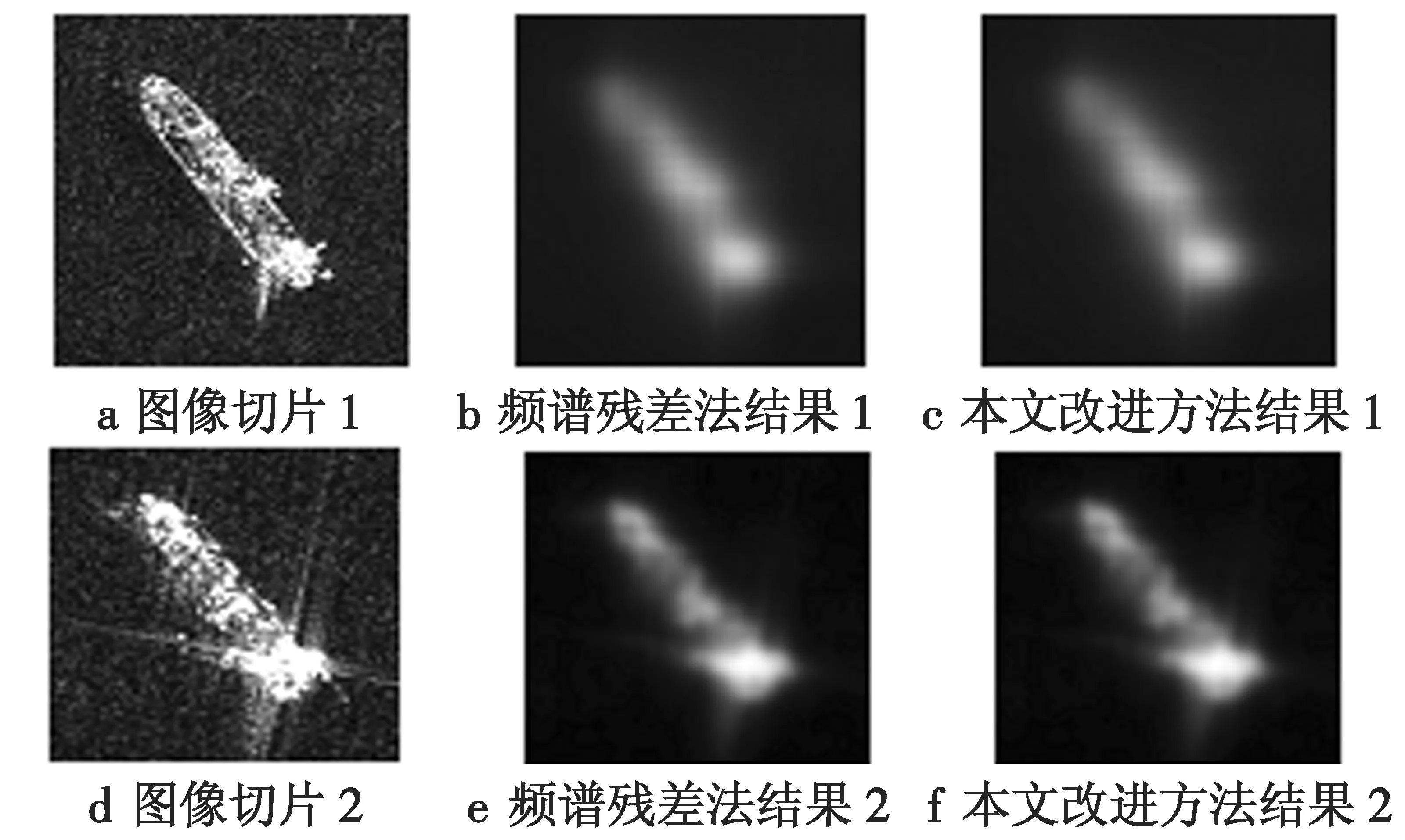
图1 两种频谱残差法的显著图细节对比Fig.1 Comparison of the details of saliency maps
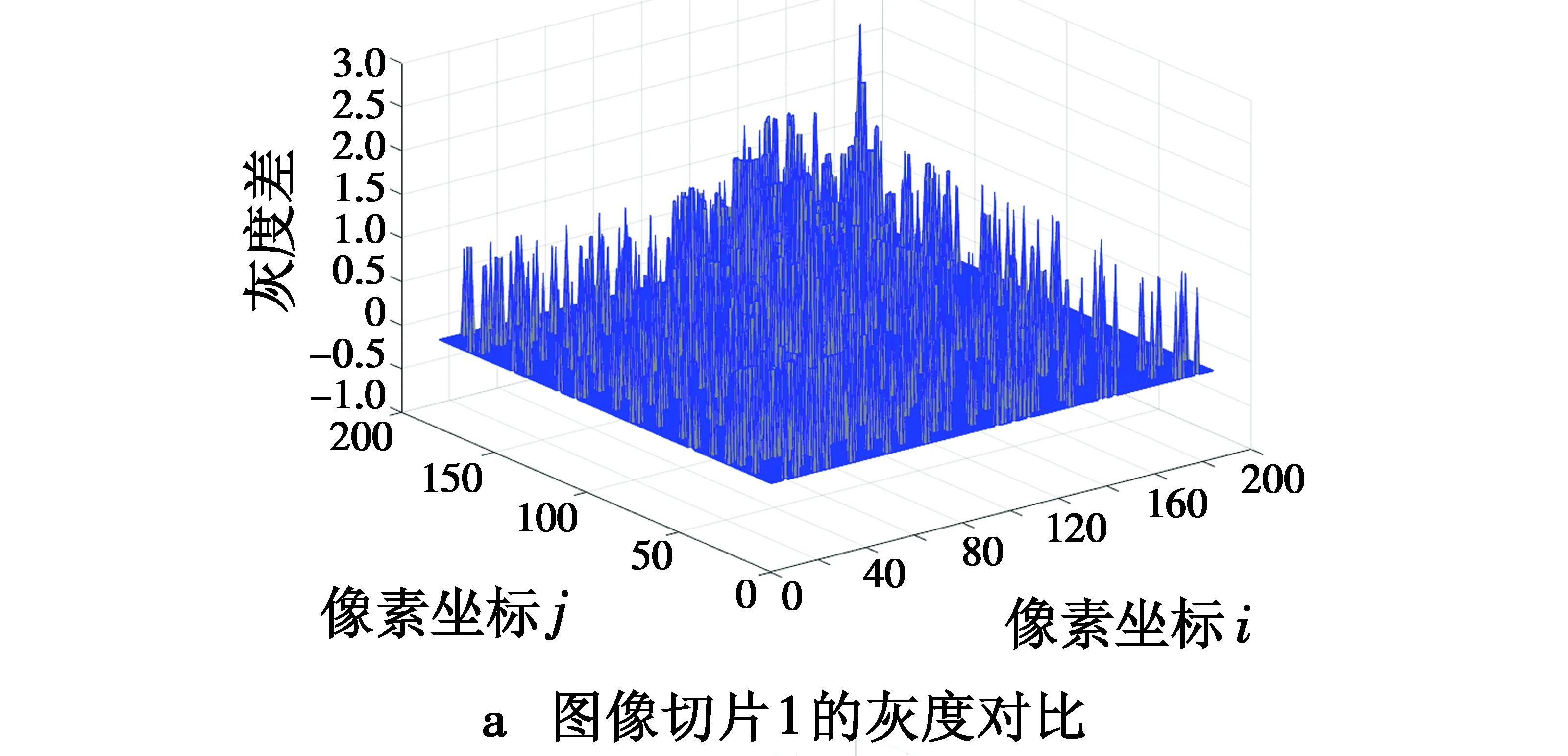
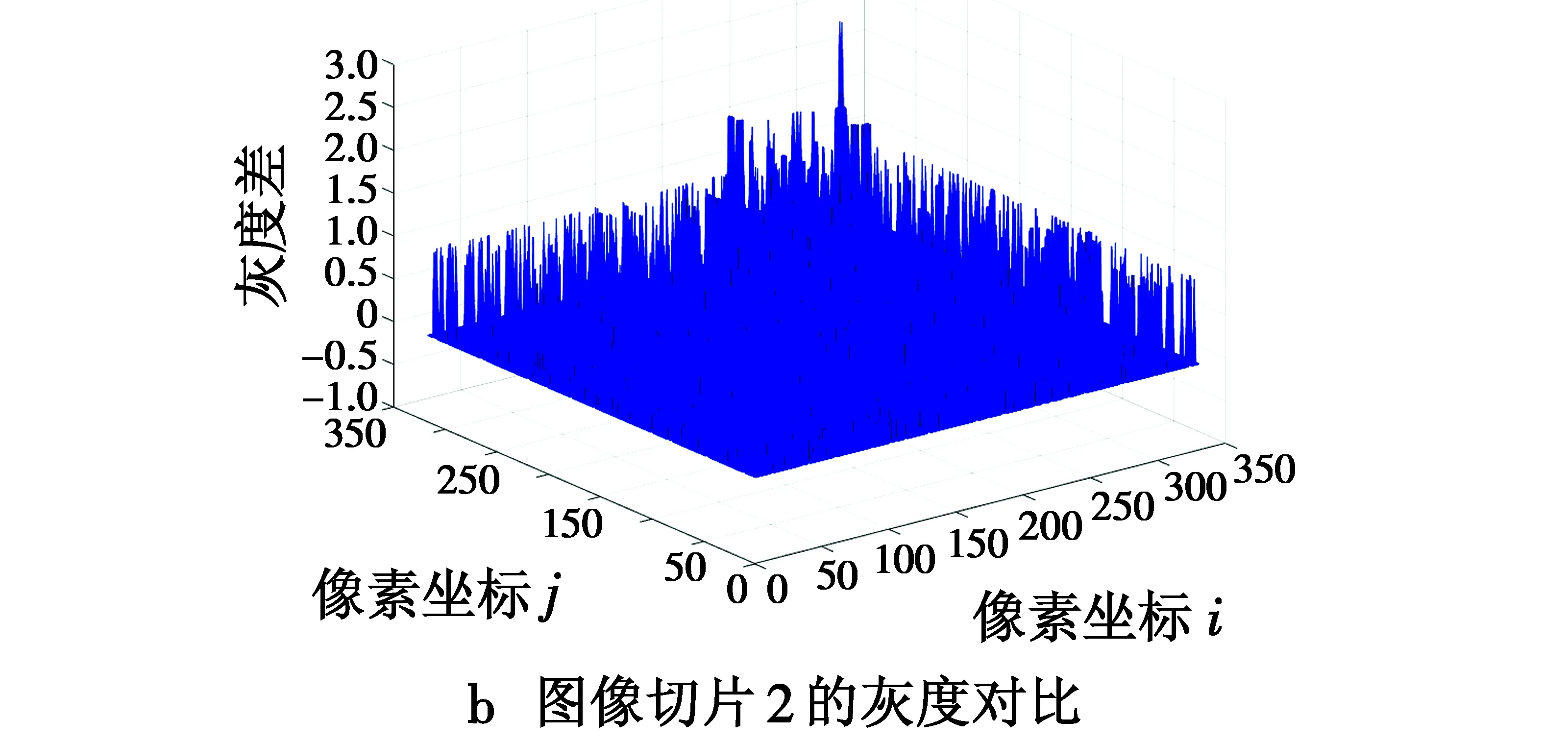
图2 图像切片的两种显著图灰度差值对比Fig.2 Comparison of gray difference of image slices
通常情况下,SAR图像中目标的灰度值要高于其临近区域的背景像素点的灰度值,因此舰船目标潜在区域一般都包含在所得到的显著性区域内,采用这种显著性区域提取的方法能够大大降低后续局部遍历检测时的数据量,在一定程度上提高检测算法的实用性能[12]。
2 SAR图像舰船目标检测处理流程
本文基于视觉显著的检测理论,分析了高分辨率SAR图像背景杂波和目标的特点,提出了一种双层检测机制下的SAR图像舰船目标检测算法。检测流程分为两个阶段:第一阶段,感兴趣区域提取,通过一个改进的视觉显著注意机制全局快速得到视觉的感兴趣区域,提取潜在的舰船区域;第二阶段结合贝叶斯理论中二元假设检验的思想,设计了一个局部最大后验概率分类器对局部像素进行检测,经参数估计、比较判决完成显著区域内像素二分类以实现目标检测。检测流程如图3所示。
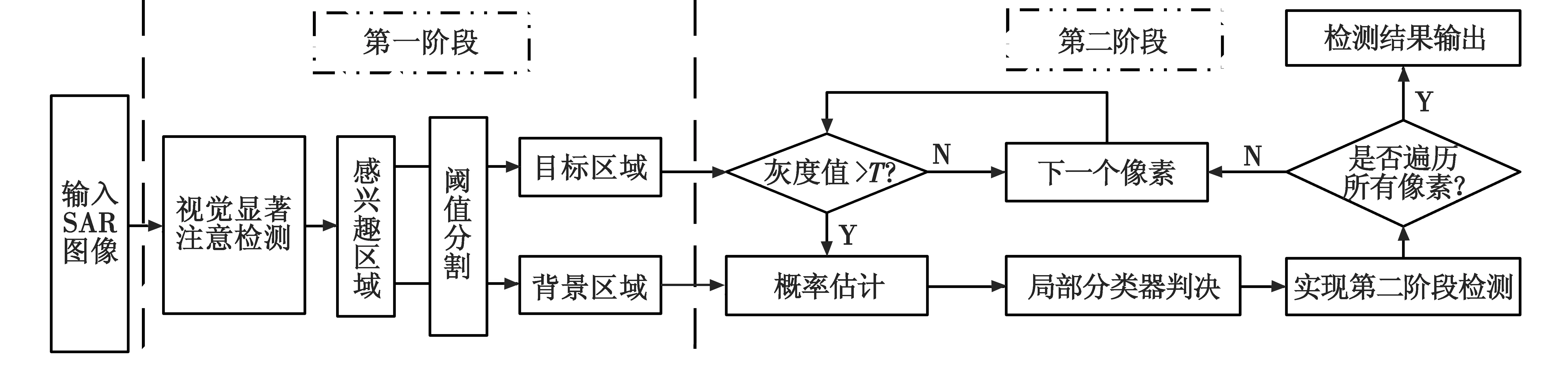
图3 基于视觉注意机制和局部最大后验概率分类器的两阶段检测流程图Fig.3 The flow chart of the two-stage detection algorithm proposed in this paper
2.1 视觉显著注意机制下的SAR图像感兴趣区域提取
大多数情况下,舰船目标是稀疏分布于海面上的。一般的检测算法对SAR图像进行检测时,往往在海面背景区域耗费较多时间,会大大降低算法的检测效率。基于图像频域视觉注意机制的思想,图像中频繁出现的信息不具备视觉显著性,相比之下舰船等新颖信息更能引起人眼视觉注意[13]。因此将视觉显著性检测用于目标检测中,以实现对图像显著性区域的快速提取。
本文两阶段检测算法的第一阶段为视觉注意机制下感兴趣区域的提取,采用改进的频谱残差法得到视觉显著图并对其处理。在对得到的显著图的处理时主要进行了两步操作:一是显著图的二值化处理;二是感兴趣区域的提取。
因此,采用两次阈值分割,首先将视觉显著图中的显著区域分割出来,以实现从视觉注意计算模型中筛选出图像中的显著性区域,即潜在的舰船区域。第二次阈值分割通过设定两个经验阈值T1,T2(其中T2>T1),将显著图中的像素进行分割,更精确地完成后续目标区域及背景区域灰度直方图的近似。
2.2 基于局部最大后验概率分类器的舰船目标检测
从分类的角度来分析,舰船目标检测即是一个两类目标的分类问题。为实现进一步对图像中显著区域进行舰船目标检测的工作,本文设计了一个局部的最大后验概率分类器对其处理。
2.2.1局部最大后验概率分类器
依据贝叶斯理论,目标检测问题实际上是完成对数据矢量x的二元假设检验,以检测目标是否存在。将数据样本分为两类,样本类别分别为ω1和ω0。设P(ωi)表示输入像素属于ωi的先验概率。因此二元假设检测的贝叶斯准则为
(9)
(10)
式中:P(ω1|x)和P(ω0|x)分别指被检测像元为目标和背景的后验概率;P(x|ωi)是在给定类别ωi下的条件概率;P(x)指获取像素的概率。根据贝叶斯准则以及最大后验概率准则,分类器可定义为
(11)
目标存在时满足的条件为
(12)
最大后验概率分类器所采用的判决准则为
(13)
为能够使用最大后验概率分类器进行目标检测,必须求取给定类别下待测像素点的条件概率P(x|ωi)和待测像素点相应类别的先验概率P(ωi)。
2.2.2分类器参数估计
求取给定两类别情况下待测像素点的条件概率P(x|ωi)即是指目标和背景的概率密度函数。高分辨率SAR图像中舰船目标呈现出分布式目标的形态特点,在上一阶段所得视觉显著图中显著区域也呈现出分布式的特点,显著性越大的像素点往往也越有可能是目标像素点。因此设定一个较大的阈值对显著图进行分割,提取大于此阈值的区域像素进行灰度直方图拟合舰船目标的概率分布。相应地,用视觉显著图小于该阈值的区域灰度直方图作为背景概率密度的近似。
相比局部CFAR检测方法需要对所有局部区域进行背景区域的分布拟合,采用这种全局处理的方式在很好地逼近了目标和背景实际分布的同时,减少了计算量。通常情况下,CFAR检测依据目标和背景特性的对比度差异进行图像处理,使用一个滑动窗口来计算背景的分布,从而求得自适应阈值。仿照CFAR的处理方式,本文采用滑窗来求取待测像素点属于ωi的先验概率以实现局部自适应检测,先验概率P(ωi)定义为
(14)
式中:xt表示当前待检测像素灰度值;x1,x2,…,xN,是滑动窗口内所有属于背景区域的像素点;c是调整先验概率的一个经验参数。
结合得到的先验概率和条件概率,对显著区域的舰船潜在目标实现二次检测。
3 实验结果与分析
在视觉显著性和局部分类器的理论基础上进行目标检测实验。考虑到Terra-SAR图像作为典型的高分辨率SAR图像,本文选取一幅具有代表性的Terra-SAR图像进行检测实验,并与经典检测算法对比,分析其优缺点。
本文实验采用的机器系统配置为Inter(R) Core(TM) i3- 4170 CPU @3.70 GHz处理器,内存为8 GB,运行平台为Matlab 2016。
选取一幅像素大小为5517×3712的Terra-SAR-X图像作为实验数据,其成像区域为直布罗陀海峡区域,图像采样率为1.25 m,极化方式为HH极化,其中该区域海况复杂,存在大量舰船与非均匀区域。
本文采用的仿真实验数据如图4a所示,该区域包含大量的不均匀海杂波背景以及尺寸有较大差别的舰船目标,并且还存在一定面积的陆地区域。图4b是对舰船目标进行标记的图像,实验图像中舰船数目为19个。为客观评价算法检测效率,实验验证过程中保证各算法都在相同条件下执行,每种算法均运行5次,记录每次运行时间,取10次实验运行耗时的平均值。
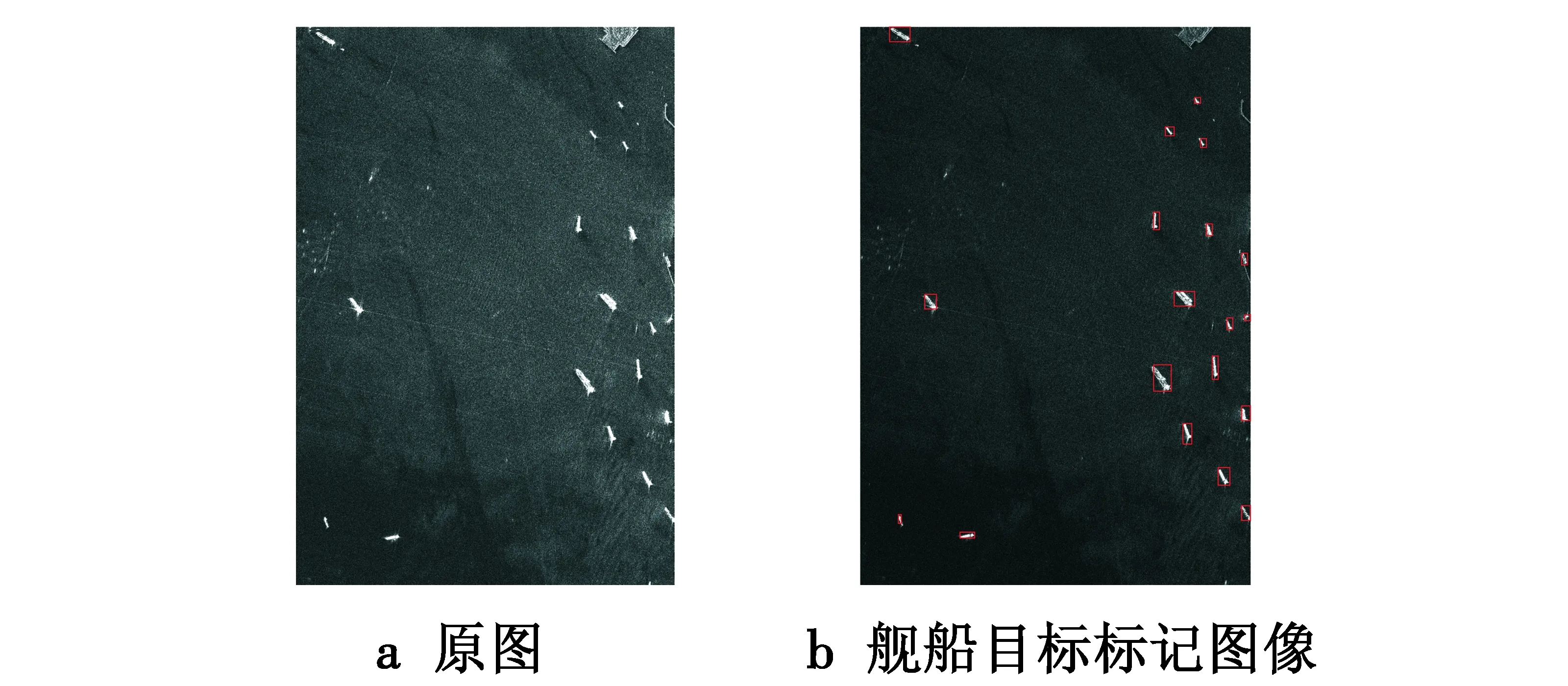
图4 实验仿真图像Fig.4 Experimental simulation images
首先采用改进的频谱残差方法计算得到显著图。图5a为所得实验图像显著图,针对本文实验采用的待检测图像,高斯滤波器的参数设定方差为0.25。从图中可以看出,显著图保留了视觉认知中明显的目标,同时也消除了陆地区域。通过对显著图进行两次阈值分割操作,以完成舰船目标的潜在区域提取、背景及目标分布的直方图拟合,仿真结果见图6。本文对全局背景及目标的近似提取操作时采用两个阈值进行分割,以实现更加精确的近似。针对所得显著图进行阈值分割,阈值需根据图像的不同进行调整。对于本文实验图像设定第一次分割阈值为28,完成图像潜在区域提取;第二次分割阈值包含2个,分别设置阈值T1=50和阈值T2=65。通过阈值T1分割得到近似背景区域,类似地,通过阈值T2得到近似的目标区域。
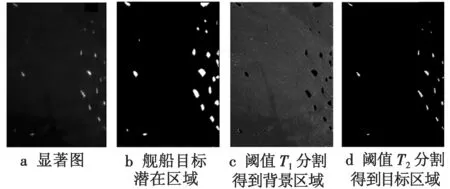
图5 基于视觉显著注意的区域提取Fig.5 Area extraction based on visual attention
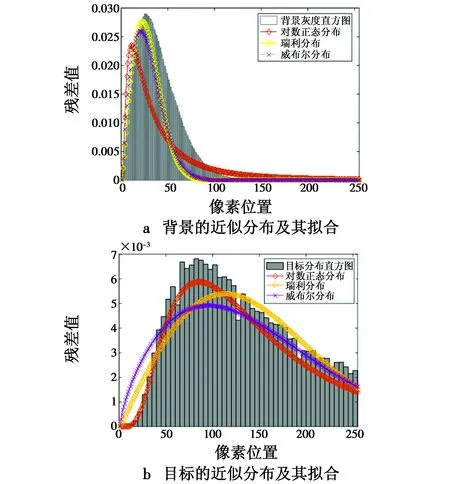
图6 目标及背景分布的拟合Fig.6 Fitting of target and background distribution
由图6可得到背景和目标的直方图拟合,分别使用对数正态分布、瑞利分布、威布尔分布对目标和背景分布进行拟合,得到局部最大后验概率分类器条件概率密度,继而,采用滑窗对目标潜在区域进行先验概率的计算。其中,滑动窗口的设计需要依据SAR图像中舰船目标所占的像素面积、尺寸及其分布情况而定,针对本文中采用的实验数据,设定滑动窗口的像素尺寸为180×180,以步长为像素90滑动,经验参数c取4×10-6。图7给出通过局部分类器的检测可得到最后的检测结果。
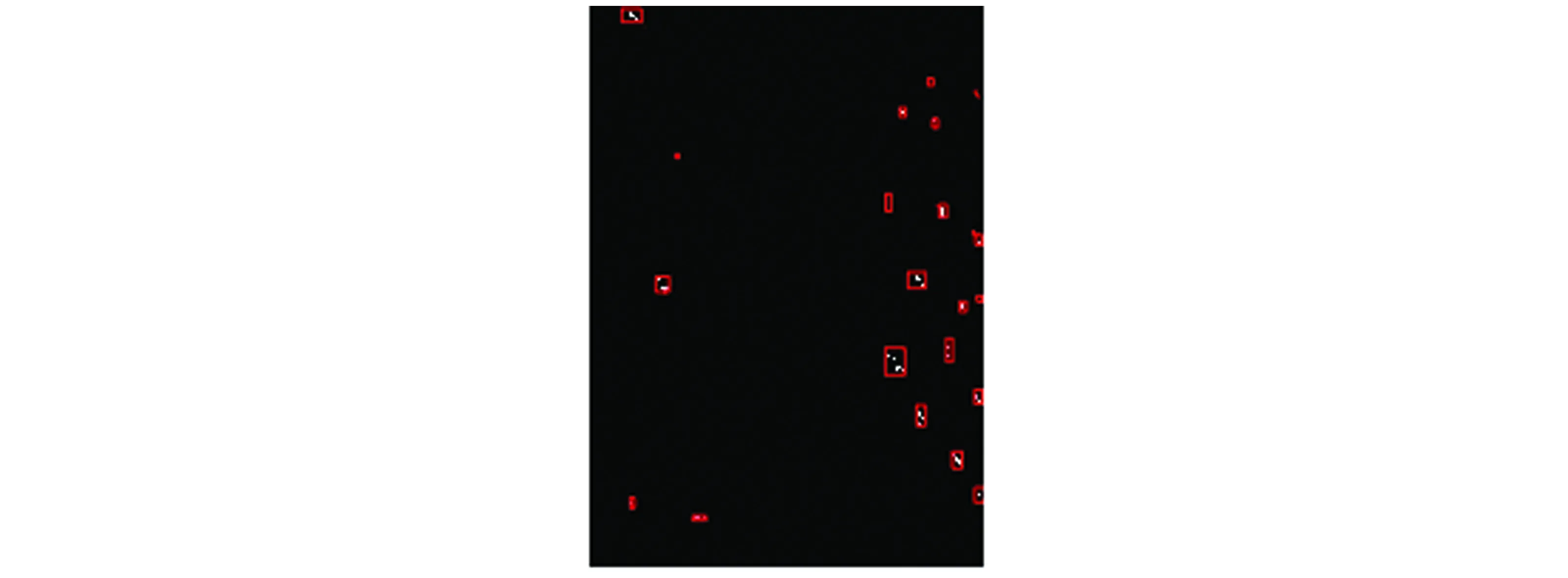
图7 实验图像的检测结果Fig.7 The detection results of the experimental images
为更好地评价各检测算法,定义品质因数
(15)
式中:Ntt为检测出的目标数目;Nfa表示虚警目标个数;Ngt表示实际存在的目标个数。
为了评价本文算法的有效性,表1给出了分别使用本文算法、双参数CFAR算法和基于Log-normal分布的CFAR算法对实验数据进行检测的结果对比。其中,双参数、Log-normal的CFAR的虚警率设为10-5。由结果可以看出:双参数CFAR检测算法存在漏检,并且检测出7个虚警目标,检测耗时较长。双参数CFAR算法优点在高斯分布参数估计相对简单,但是由于高斯分布对海杂波尤其是复杂海杂波背景拟合度不高,检测精度低;基于Log-normal分布的CFAR舰船检测算法检测出了所有真实目标,但存在5个虚警目标,并且耗时最长。虽然对杂波进行分布拟合度得到了提高,但是背景分布参数估计和概率分布函数计算时间相对较长。
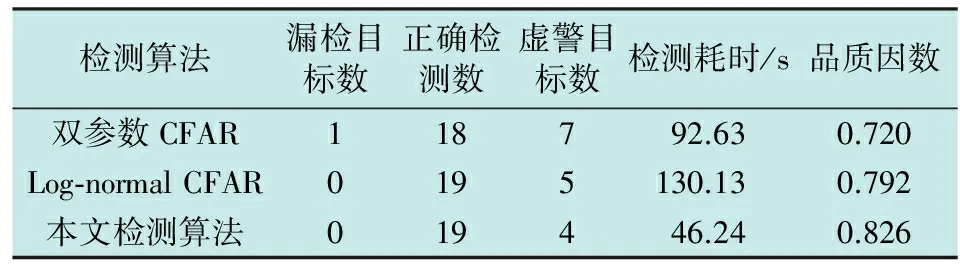
表1 复杂海面Terra-SAR图像3种检测方法检测结果对比
对比以上方法,实验表明本文提出的检测算法由于在视觉显著计算中,陆地相对于舰船目标出现频率是相对较高的,属于不显著信息,因此本文无需对原图像做海陆分割的预处理,而是直接利用视觉注意计算模型获取图像中的感兴趣区域。继而通过一个最大后验概率分类器进行目标检测处理,比直接在原始图像上进行目标检测具有更高的检测效率和更低的虚警率。
4 结束语
本文分析不同海况条件下的海洋杂波统计特性和检测分类的基本理论,借鉴生物视觉认知思想,设计和改进了高分辨SAR图像舰船目标检测方法。通过仿真
实验验证了本文提出的检测算法在不同杂波环境下具有较好的检测性能。
现有研究需要深入和完善的问题还有:1)检测场景中若存在较多小面积的岛屿时,需要进行陆地消除的预处理,陆地消除也是另外一个比较重要的研究领域;2)在进行频域变换的视觉显著性处理中,需要根据舰船目标的图像特性进一步完善带通滤波器的参数设置,以寻求相对适用性强的滤波器;3)下一阶段将借鉴生物认知、机器学习思想来设计局部分类器,更进一步提升检测精准度。
[1]MOREIRA A,PRATS-IRAOLA P,YOUNIS M,et al.A tutorial on synthetic aperture radar [J].IEEE Geoscience and Remote Sensing Magazine,2013,1(1):6- 43.
[2]邓云凯,赵凤军,王宇.星载SAR技术的发展趋势及应用浅析[J].雷达学报,2012,1(1):1-10.
[3]邢相薇,计科峰,康利鸿,等.HRWS SAR图像舰船目标监视技术研究综述[J].雷达学报,2015,4(1):107-121.
[4]何友,关键,彭应宁.雷达自动检测与恒虚警处理[M].北京:清华大学出版社,1999.
[5]FARROUKI A,BARKAT M.Automatic censoring CFAR detector based on ordered data variability for nonhomogeneous environments[J].IEEE Proceedings of Radar,Sonar and Navigation,2005,152(1):43-51.
[6]HARM G.Developments in detection algorithms at JRC[C]//The Third Meeting of the DECLIMS Project,Van-couver,BC,2004:1-7.
[7]陈利民,杨学志,张晰,等.SAR舰船检测算法对比分析研究[J].遥感信息,2015,30(2):99-104.
[8]焦李成,张向荣,侯彪,等.智能SAR图像处理与解译[M].北京:科学出版社,2008.
[9]ACHANTA R,ESTRADA F,WILS P,et al.Salient region detection and segmentation[C]//Proceedings of the 6th International Conference on Computer Vision Systems (ICVS 2008),Santorini,Greece,2008:66-75.
[10]GAO D S,HAN S Y,VASCONCELOS N.Discriminant saliency,the detection of suspicious coincidences,and applications to visual recognition[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2009,31(6):989-1005.
[11]HOU X D,ZHANG L Q.Saliency detection:a spectral residual approach[C]//IEEE Conference on Computer Vision and Pattern Recognition(CVPR 2007),2007:1-8.
[12]张志龙,杨卫平,张焱,等.基于频谱残留变换的红外遥感图像舰船目标检测方法[J].电子与信息学报,2015,37(3):2144-2150.
[13]ACHANTA R,HEMAMI S,ESTRADA F,et al.Frequency-tuned salient region detection[C]//IEEE Conference on Computer Vision and Pattern Recognition,2009:1597-1604.
