臭氧消毒法果蔬清洗机的设计及研究
2018-04-19王开宝周振强刘玉力宋春雷秦庆坤
韩 杰,王开宝,周振强,刘玉力,宋春雷,秦庆坤
(北华大学 机械工程学院,吉林 吉林 132021)
现在水果和蔬菜的病虫害越来越重[1],在上市之前,绝大部分果蔬需要进行多次用药.当人们食用了农药残留超标的果蔬后,会导致人体的神经系统和肝、肾等重要器官出现损伤.农药残留超标问题严重危害着人类的生命安全,这一问题已引起全球的重点关注.降解农药残留是减少环境农药残留、降低农药毒负作用的一个重要研究领域.随着农产品需求量的不断扩大,随之带来的是农药的大面积使用,自然分解已经无法达到人类食用的安全需求,因此只有通过科技的手段来促进农药的降解,使农产品达到食用的安全级别.
综上所述,市场急需一种能高效降解农药残留的装置,根据臭氧消毒法,设计了一款果蔬清洗机,可以有效地降解果蔬中的农药残留,分离重金属离子,让人们吃的更健康.
1 臭氧消毒法果蔬清洗机总体方案设计
在满足功能的前提下,果蔬清洗机还应该满足模块化、实用、操作简单等设计要求[2],并且考虑到实际应用,通过优化设计的方法设计的果蔬清洗机,整机的机构显得较为紧凑,同时整机的功能得到了完善.果蔬清洗机主要是利用臭氧消毒的化学原理,对果蔬进行快速高效的清洗、消毒.根据我们的设计,基本结构如图1所示[3]:

图1 臭氧消毒法果蔬清洗机三维结构
整体由四个部分组成,臭氧发生装置、超声波发生装置、果蔬清洗槽、控制系统.工作时,首先将清洗槽中注入适量的清水,然后将需要清洗的果蔬放入清洗槽中,并将透明盖盖于清洗槽上.同时按下臭氧发生控制按钮,臭氧发生装置通过电晕放电产生臭氧,在气泵作用下通过单向阀后,再分别由曝气石通入水中,产生臭氧水.按下臭氧控制按钮的同时按下超声波控制按钮,超声波通过换能器产生高频振动,加速臭氧对有机物的分解,5~10 min完成对果蔬的清洗、消毒工作.
1.1 果蔬清洗机超声波发生器
果蔬清洗机在工作时,超声波为其提供合适的中频脉冲[4],通过超声波的空化作用使强氧化性的臭氧迅速进入微生物的细胞膜,氧化细胞内的物质,致使微生物失活.超声波释放的能量通过换能器使清洗介质产生高频振动,并由此产生较大的初速度,使介质分子猛烈碰撞,造成分子键断裂,从而加速臭氧对有机物质的分解作用.为此我们选择了一款超声波发生器,如图1所示,功率、频率、时间均可调节.主要的参数如表1所示:

表1 超声波发生器相关参数
1.2 果蔬清洗机清洗槽的结构设计
清洗槽必须满足食品级卫生要求[5],清洗槽既要有一定的耐腐蚀性,同时还要对超声波的能量吸收较少,因此清洗槽的制作材料选用不锈钢,槽壁厚度要适中,一般选用1~2 mm本清洗槽采用1.5 mm厚的不锈钢板[6],与清洗液接触的内部槽面均经过抛光处理,以减少空化腐蚀,为了使粘接更加牢固,槽底与换能器粘接面磨砂处理,清洗槽形状和尺寸是影响超声波清洗机清洗效果重要因素之一,传统清洗设备的槽体一般有圆筒形和多边形两种,由于圆筒形清洗槽与超声波换能器耦合性差,因此本超声波清洗机选用多边形槽体,如图2所示.

图2 果蔬清洗机清洗槽三维模型
1.3 臭氧发生装置的设计
臭氧由臭氧发生管产生[7],其原理为电晕法.图3为电晕法制备臭氧的原理,干燥空气在高压电的作用下产生臭氧.主要由供气系统、冷却风扇、电源和臭氧发生管组成.其工作过程如下:气体在空气压缩机的作用下进入气体过滤器,出来的干净空气导入臭氧发生管,电晕放电产生的高能电子轰击空气中的O2使其解离成活性O,O又与O2产生化学反应生成O3分子,臭氧发生管中的气体为臭氧与空气的混合气体.由于在电晕放电时会产生高温,加速臭氧的分解,所以需要对臭氧发生管进行冷却处理,确保臭氧不会因为温度升高而分解.

图3 电晕放电原理
1.4 控制系统的设计
核心器件是2片51单片机[8],分别作为主机和从机,通过浑浊度传感器、水位传感器、臭氧发生器、超声波发生器采集相关信息和数据,将这些信息和数据传给从机,从机与主机进行直接通讯,主机接收这些信息和数据,通过外围电路,如 AT24C02、显示电路、报警电路、按键电路等将这些数据进行加工和处理达到预定要求.
2 有限元模态分析过程
振动模态是弹性结构固有的、整体的特性[9].通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内的各阶主要模态的特性,就可以预言结构在此频段内在外部或内部各种振源作用下产生的实际振动响应.因此,模态分析是结构动态设计及设备故障诊断的重要方法.
任何结构都具有固有频率,其值有本身的结构所决定,自由振动是一种无衰减力的振动状态.振动外力的周期与结构固有周期一致或者接近时,则要发生共振,在设计时我们应该避免共振.清洗槽是整个装置的主要承载机构,并且激振源与其紧密连接,所以需要对清洗槽做模态分析.
2.1 参数设置、网格划分
依据设计图纸,在模态分析界面设置材料的密度、弹性模量以及泊松比等必要参数.为了提高计算精度,采用了标准网格划分参数,设置了最大、最小单元尺寸如图4所示.共有12 154个节点以及6 743个单元.
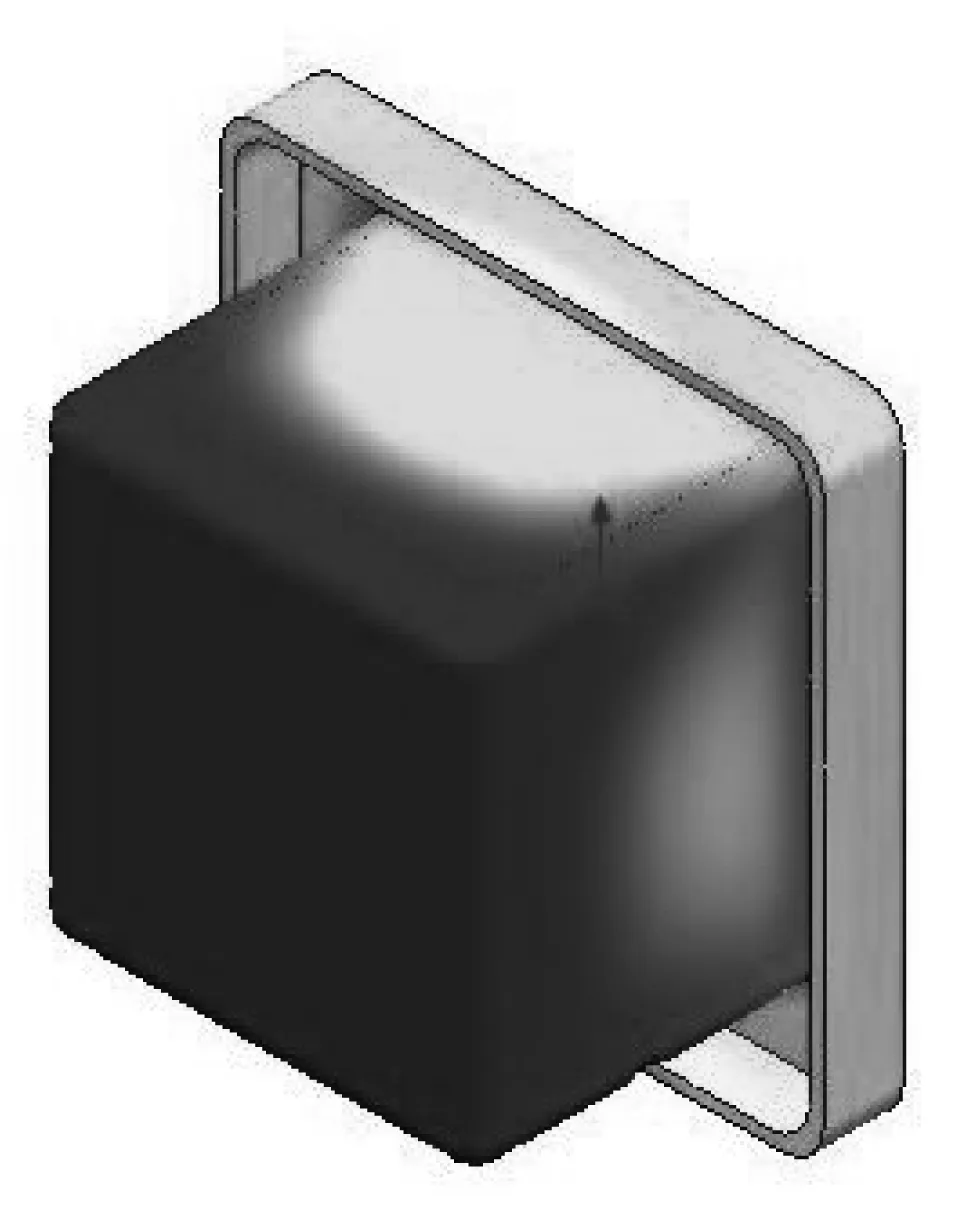
(a) 有限元模型
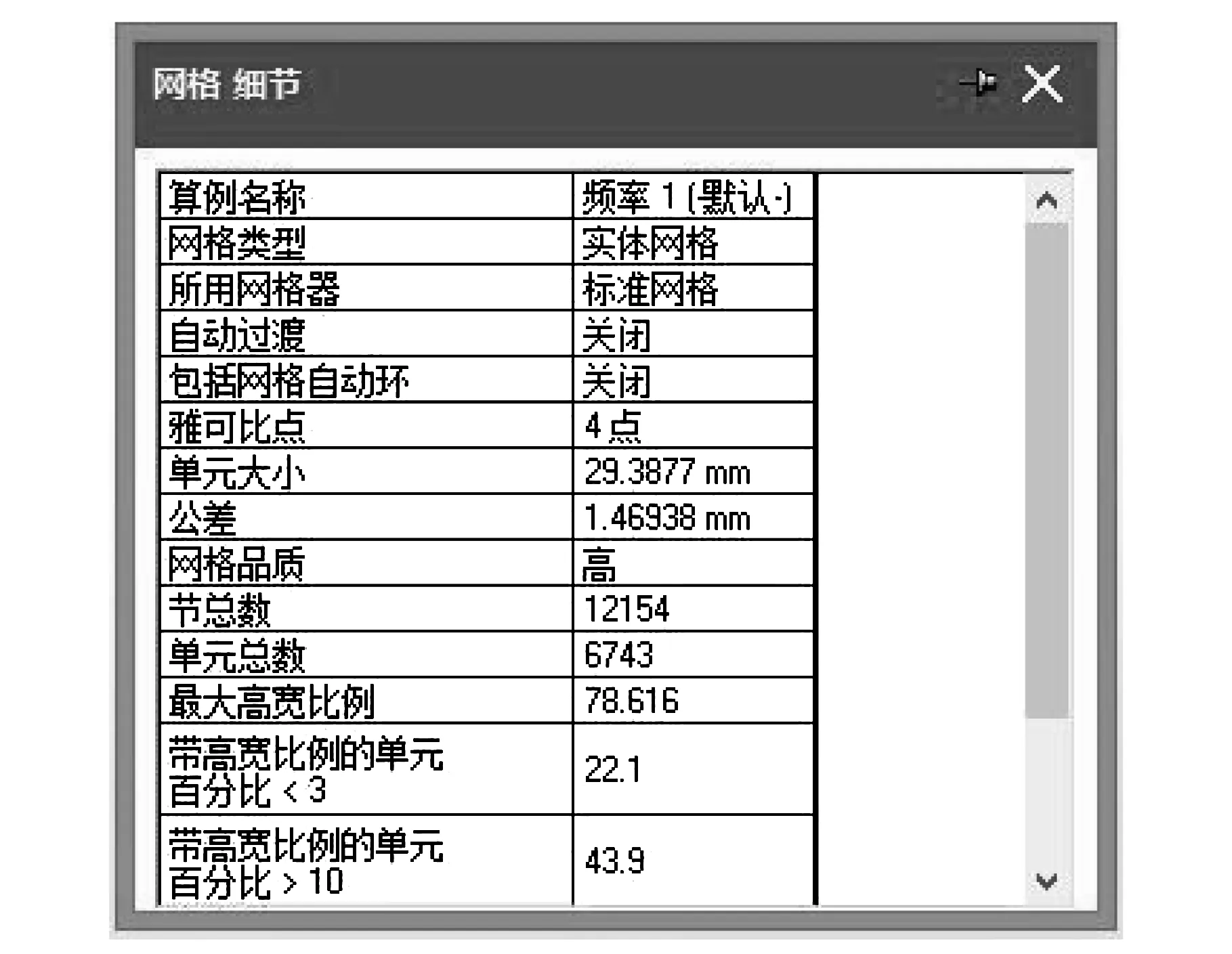
(b) 网格划分参数图4 有限元模型及网格划分
2.2 约束条件设置
约束条件设置清洗槽在工作时,是平放在固定平面上的,整个壳体呈平放状态.因此需要对清洗槽地面施加完全固定约束,与实际工作状态相符合.除此之外,还需给清洗槽加一定的载荷,因为在工作过程中,清洗槽中有工作介质(水)以及果蔬.
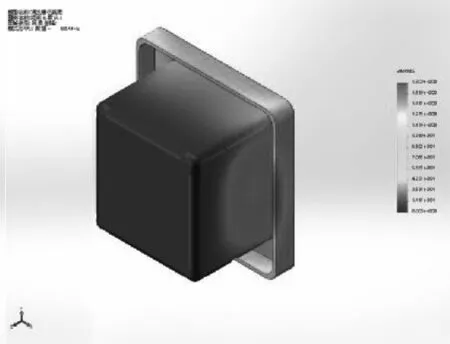
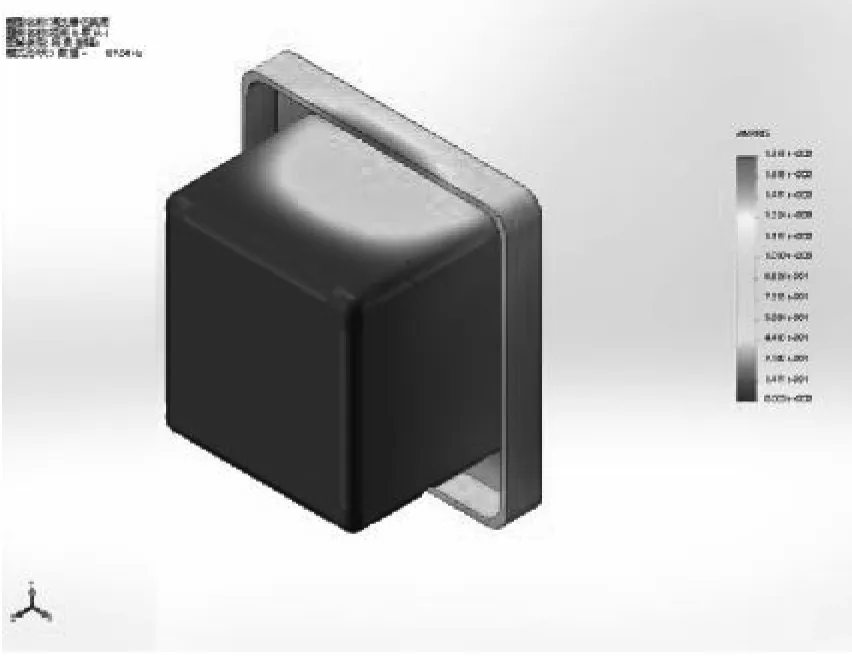
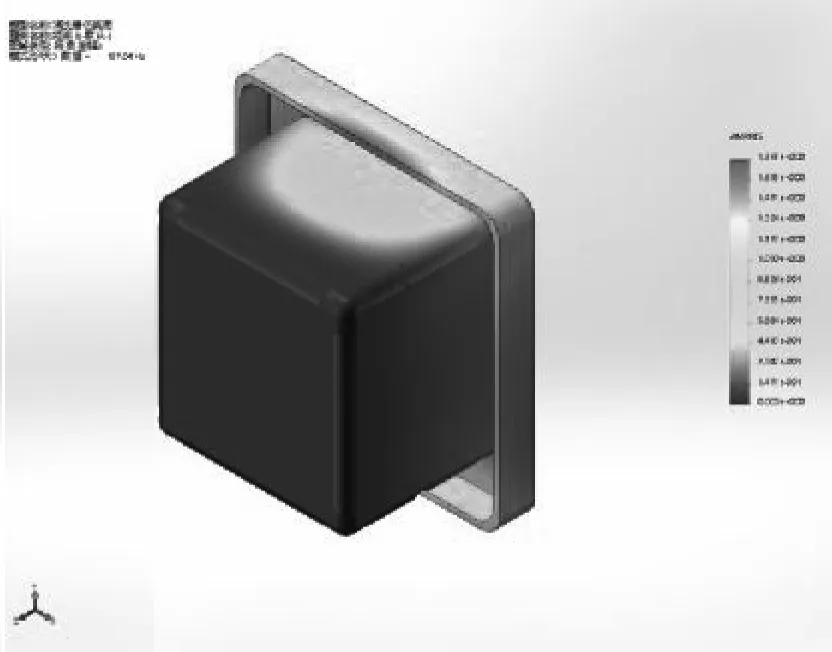
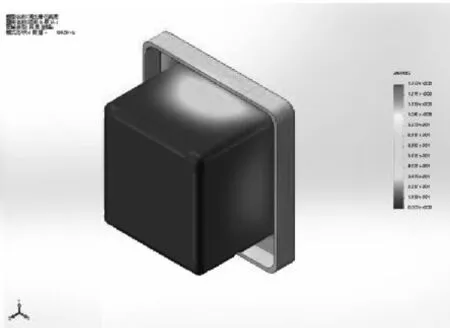
2.3 有限元分析结果
在使用时,为了检验清洗槽是否能满足使用强度,同时考虑到清洗槽的动态性能会受到超声波频率的影响,超声波的工作频率为25~50 Hz,而清洗槽的一阶固定频率为163.95 Hz(为最小频率),综上我们提取前六阶模态(表2)进行求解,并观察预应力作用下壳体变形情况&求得壳体在静力作用下的最大变形为沿径向的弯曲变形,最大变形量为(0.009 2 m 表2 清洗槽各阶模态的固定频率 (a) 一阶振型 (b) 二阶振型 (c) 三阶振型 (d) 四阶振型 (e) 五阶振型 (f) 六阶振型 为了检验清洗槽是否能满足使用强度,同时考虑到清洗槽的动态性能受到超声波频率的影响,综上所述我们取前六阶模态进行分析(固有频率随阶数的增加而增大),并观察预应力作用下槽体的体变形情况,求得槽体在静力作用下的最大变形为沿径向的弯曲变形,最大变形量为(0.009 2 m 通过对清洗槽进行有限元模态分析,得到了该结构的前六阶固有频率以及相应的振动形式,分析后得出结论: 由表2可知清洗槽的前六阶频率分布在163.95 Hz和199.08 Hz之间[10].共振的条件为:当外部的激励频率与结构的固有频率接近或相等是,将发生共振现象,会对装置造成较大的损伤.该装置超声波正常工作时的最大频率为50 Hz远小于清洗槽的最小固有频率163.95 Hz,因此,内部和外部激励源不会使清洗槽产生共振现象.对清洗槽的前六阶的振动特点分析后,得到了结构的薄弱区域(清洗槽口边缘),为以后的结构改进以及优化提供了理论基础. 本文根据臭氧消毒法,研制了一种新型的臭氧消毒法果蔬清洗机.利用超声波和臭氧的协同作用,通过超声波的空化作用使强氧化性的臭氧迅速进入微生物的细胞膜,氧化细胞内的物质,致使微生物失活.超声波释放的能量通过换能器使清洗介质产生高频振动,使介质分子猛烈碰撞,从而加速臭氧对有机物质的分解作用.此外,超声波振动可以将臭氧气泡破碎成微气泡,大大地提高了臭氧的溶解速度,可以使臭氧在短时间内达到较高的浓度,有利于臭氧灭菌、降解农药残留. 该装置操作简单,无须专门训练,能满足不同人群和不同场所的需求. 参考文献: [1]王海鸥,胡志超,吴峰,等.超声波臭氧组合果蔬清洗机设计与试验[J].农业机械学报,2011,42(7):165-169+175. [2]江蓝.家用臭氧发生器将香起来[J].科技信息,1996(6):29. [3]肖喜鹏,张加胜,刘祖超.基于单片机控制的超声波换能器设计与实现[J].应用声学,2015,34(2):113-118. [4]李玉标,田春艳.学校洗浴废水处理方法概述[J].吉林化工学院学报,2011,28(3):44-47. [5]朱天宇,肖红,王飞.高效可调中频臭氧发生器的研究[J].河海大学常州分校学报,2002(3):6-10+24. [6]刘翠娜,张双喜,周恒勤,等.便携式蓄冷保温箱结构优化[J].吉林化工学院学报,2011,28(1):29-33. [7]王飞,朱天宇,姚河清,等.臭氧发生管的设计及其稳定性研究[J].河海大学常州分校学报,2002(1):1-5. [8]张敏.果蔬清洗机的单片机模糊控制技术研究[D].济南:山东师范大学,2012. [9]左晓明.基于SolidWorks的变速箱变速机构模态分析[J].机械传动,2011,35(5):49-51 [10] 王应彪,王远,方赛银.基于SolidWorks的拖拉机齿轮泵虚拟装配及模态分析[J].湖北农业科学,2013,52(3):688-690+695.


3 结 论