轮轨耦合高速电梯导轨振动特性分析
2018-04-13张青杨玉虎仉硕华张瑞军
张青,杨玉虎,仉硕华,张瑞军
(1.天津大学 机械工程学院,天津300072;2.山东建筑大学 机电工程学院,山东 济南250101)
0 引言
电梯的振动主要分为垂直和水平2个方向振动[1]。相较于垂直振动,人体对水平振动更为敏感,而电梯的水平振动与电梯运行速度成正比。目前电梯正朝着高速度、高行程方向发展,对高速状态下电梯水平振动的研究势在必行[2-4]。导向系统是对电梯水平振动起决定性作用的子系统,导轨作为导向系统的重要组成部分,能够限制电梯轿厢系统(包含轿厢、轿厢架)的水平位移与振动,然而导轨自身的振动及其制造精度、安装工艺等方面的缺陷又加剧了电梯轿厢系统的水平位移与振动。长期以来,人们只是将导轨作为激励源[5-6]研究轿厢的振动响应,而在电梯实际运行过程中轿厢系统和导轨之间是相互作用、相互影响的,在这种耦合状态下轿厢系统的振动会反过来引起导轨的振动、变形,特别是在高速状态下,这一现象更为显著。导轨振动与变形不仅影响到电梯舒适性,如果其长时间存在振动与变形,还会引起导轨固定螺栓松动、轨道面不铅直,甚至轿厢变形、卡死等问题,严重时还会造成紧急情况下电梯安全装置失灵等后果[7]。因此,研究耦合状态下高速电梯导轨的振动响应具有重要的现实意义。
由于人们对电梯导轨自身的振动缺乏足够重视,导轨振动方面的文献鲜有涉及。在将导轨看做激励源施加于轿厢系统方面,李立京首次将导靴系统简化为弹簧—阻尼系统,建立了2自由度电梯轿厢水平振动模型,并在对电梯导轨激励进行分析的基础上对振动模型进行了仿真,为电梯水平振动分析提供了一种有效地模拟方法[8];傅武军利用局部坐标系和整体坐标系之间的转换得到了电梯水平振动微分方程,讨论了电梯导轨的扰动模型,并比较了电梯在导轨正弦、三角、脉冲和阶跃扰动下电梯的加速度响应,得出导轨的阶跃扰动会引起较大水平振动的结论[3];冯永慧建立了电梯水平振动的空间动力学模型并将实测导轨激励作为输入信号对轿厢系统振动模型进行了仿真[9];梅德庆考虑了滚动导靴橡胶靴衬的非线性率相关特性建立了滚动导靴—导轨的三维滚动接触模型,并在考虑滚动导靴不圆度偏差和导轨廓形偏差的基础上拟合出滚动导靴—导轨不平顺激励的数学模型[10];尹纪财将影响轿厢水平振动的导轨表面不平度、导轨的弯曲与导靴自身缺陷等因素转化为导轨对导靴的作用力,进而对高速电梯轿厢水平振动进行了分析[11]。上述研究都将导轨作为外激励对轿厢的水平振动进行分析,均未考虑导轨与轿厢系统间的耦合作用。而在考虑导轨与轿厢系统间的耦合作用方面,李丹达从轮轨接触刚度出发,建立了包含电梯框架、滚轮和导轨在内的耦合动力学模型,但未考虑轮轨间的接触阻尼和滚轮与轿厢间的接触刚度[12];郭克尖建立了电梯的轿厢—导靴—导轨动力学耦合模型,并考虑了导靴与导轨间的非线性因素[13]。这些研究虽涉及了耦合作用,但对导轨的振动响应却未做出研究。此外,上述研究都是针对电梯在固定接触参数及电梯在预紧力和导轨表面不平度等接触参数为定值下的振动响应分析,缺乏电梯系统接触参数与电梯导轨振动响应之间基本规律的系统研究。随着电梯的不断提速,轿厢系统与导轨间的相互作用更加剧烈[14],导轨自身的振动也更加明显,再将导轨仅看做某种激励与工程实际不符;值得注意的是,高速状态下电梯导轨振动响应对电梯系统接触参数的灵敏度更高。因此,有必要在考虑轿厢—滚轮—导轨系统之间相互耦合作用的基础上,系统地分析研究高速条件下电梯接触参数对电梯导轨振动响应的影响规律。
文章在考虑导轨与滚轮间接触刚度与接触阻尼以及滚轮与轿厢间连接刚度与连接阻尼的基础上,建立了电梯轿厢—滚轮—导轨耦合(轮轨耦合)系统模型,并运用此模型分析了轮轨预紧力和导轨表面不平度2个接触参数对导轨振动响应的影响规律。进一步发展了目前高速电梯领域在考虑轮轨耦合作用下对导轨振动响应的研究,满足高速电梯开发中需解决的关于有效地预测和控制高速电梯动力学特性和运动规律这一关键技术问题的需求[3]。
1 电梯轮轨耦合系统模型的构建及求解
1.1 模型建立的假定与简化
电梯作为一个复杂的机电系统,通常将其分为8大子系统,轿厢系统和导向系统是其中最重要的2个子系统,轿厢系统简称轿厢,由轿厢体和轿厢架组成,导向系统由导轨、导靴和导轨架组成。安装在轿架上的4个导靴引导电梯沿着固定于建筑物上的导轨上下运动,此外,导靴还具有一定的减振作用。针对高速电梯的结构和运动规律以及理论研究的方便,做如下假定与简化:
(1)轿厢体与轿架为刚性连接;
(2)轿厢质心与其几何中心重合;
(3)因为在轨道面法向上轿厢相对滚轮、滚轮相对于导轨的位移均较小,轿厢和滚轮需简化为质量弹簧阻尼系统;
(4)各滚轮的结构和参数完全相同;
(5)一侧多根导轨简化为多跨细长等直连续梁[12]。
引起电梯系统水平振动的原因是多方面的,包括导轨制造和安装误差、滚动导靴导轮不圆度偏差、轿厢的静平衡状态以及井道内气流影响和乘客负载变动等。而相关研究表明,对于提升速度<5 m/s的电梯,水平振动主要来自导轨不平度。其中,导轨垂直度与导轨接头缝隙和台阶均属于导轨安装质量问题,文章旨在研究由导轨制造阶段所决定的导轨表明轮廓粗糙度对电梯系统振动的影响。因此,导轨表面不平度均指导轨表面粗糙度。
电梯系统水平振动包含横向振动(y方向)和前后振动(z方向),而两者力学模型相似,且模态频率比较接近,因此,仅对高速电梯横向振动力进行研究。如前文所述,导轨—导靴—轿厢系统耦合状态下,导轨的振动对电梯系统振动具有重要影响。因此,文章主要研究接触参数对导轨水平(横向)振动的影响规律,所建立的轿厢—滚轮—导轨耦合系统水平振动模型如图1所示。其中,l为相邻两导轨支架的间距,m;h为上、下滚轮间的垂直距离,m;yi(x,t)为t时刻第i列导轨的弹性变形,i=1,2;ywj为滚轮j的水平位移,j=1,2,3,4,m;yc为轿厢水平位移,m;θ为轿厢转角位移,rad;m0为导轨单位长度的质量,kg/m;m为滚轮质量,kg;k1为滚轮与导轨间的接触刚度,N·m2;c1为滚轮与导轨间的接触阻尼,m/Ns;k2为滚轮与轿厢系统间的连接刚度,N·m2;c2为滚轮与轿厢系统间的连接阻尼,m/Ns;mc为轿厢系统质量,kg;jc为轿厢系统转动惯量,kg·m2;F为轮轨间的预紧力,N;r[s(t)]为t时刻滚轮与导轨接触处导轨表面不平度,m。

图1 轿厢—滚轮—导轨耦合系统水平振动模型示意图
1.2 轮轨耦合系统方程建立
由于导轨的挠度与其长度相比要小很多,因此假定导轨横截面沿y轴方向作平移而不发生转动,即导轨为 Euler梁[13]。设导轨恒载质量均匀分布(m0为常数),阻尼为粘滞阻尼c0;导轨的弯曲刚度为EI;t时刻轿厢下部滚轮的瞬时位置为s1(t)、轿厢上部滚轮的瞬时位置为s2(t);4个滚轮与导轨间的接触力分别为f1(x,t)、f2(x,t)、f3(x,t)、f4(x,t);δ为Dirac函数且导轨的运动符合小变形理论并在弹性范围内。则根据Bernoulli-Euler理论,考虑轮轨耦合作用下导轨1和2的强迫振动微分方程[15]由式(1)、(2)表示为

对轿厢及滚轮而言,导轨表面的不平度是引发其振动的重要激励源,而在考虑轮轨耦合作用下,导轨表面的不平度又会对导轨自身的振动产生影响,表现为对滚轮与导轨间接触力的变化。为了更加方便地研究导轨表面不平度与导轨振动的关系,文章假定同一提升高度处导轨1、2表面不平度值相同,设下滚轮与导轨1、2接触点处的导轨表面不平度值为r[s1(t)],上滚轮与导轨 1、2接触点处的导轨表面不平度值为r[s2(t)]。滚轮在预紧力作用下与导轨始终保持接触,则考虑轮轨耦合作用下轮轨间的接触力由式(3)~(6)表示为


根据上述假定,轿厢与滚轮均为质量弹簧阻尼系统。轿厢与滚轮相互耦合,两者之间的阻尼力由轿厢的瞬时水平速度、旋转角速度和滚轮的瞬时水平速度共同决定;同样,两者间的弹性力由轿厢系统的瞬时水平位移、旋转角位移和滚轮的瞬时位移共同决定。考虑轿厢—滚轮—导轨的耦合作用,分别建立4个滚轮的运动方程,由式(7)~(10)表示为

将轿厢系统看做一刚体,则其水平运动包含沿y轴的平动及绕质心的转动。运用达朗贝尔原理建立考虑轿厢系统与滚轮耦合作用下轿厢系统整体平动及转动位移的微分运动方程,由式(11)、(12)表示为

1.3 基于新型二步积分法的轮轨耦合系统方程求解
(1)偏微分方程的处理
结构的任一合理位移都可以由此结构具有响应振幅的各个振型的叠加来表示[15]。运用振型分解法将式(1)、(2)化为常微分方程,由式(13)表示为

式中:qij(t)为导轨的广义振型坐标;αi(x)=为导轨的振型函数,nl为导轨总长度值,m。
将式(13)代入 式(1)和(2)中,方程两边同乘以αi(x)并在[0,l]区间上积分,利用振型的正交特性,可得到第j列导轨的第i阶振型的广义坐标运动方程,由式(14)表示为

式中:k0为导轨在广义坐标下的计算刚度;fij为第j列导轨的广义载荷向量。
将考虑耦合作用下导轨的广义坐标运动方程(14)与轿厢及滚轮的运动方程(3)~(12)联立,经整理,可得系统的耦合动力学方程,由式(15)表示为

式中:{Y}=[yc,θ,y1,y2,y3,y4,q1,q2]T为系统广义位移向量;{F(t)}为考虑轮轨预紧力下系统的广义荷载向量。
(2)数值积分方法的选用
对于式(15)的动力学方程组,其系数随着滚轮在导轨上位置的变化而不断变化,使系统动力学方程组变为一个时变系数的二阶微分方程组。对于这样的时变系数微分方程组一般采用逐步积分的数值方法求解[16]。
受隐式积分法中Newmark-β法的启发,翟等在车辆—轨道耦合相互作用领域首次提出一类新型显式二步数值积分法-Newmark显式算法[17-18]。此算法既有显式法所具有的计算简捷的特点又具有隐式法的稳定性,近十年来,在国际上称之为“翟方法”,受到广泛关注与重视[19]。文章用此方法得到导轨任一时刻在广义坐标下的振动响应,再根据式(14)乘相应时刻的各阶振型函数,再叠加,从而得到对应时刻滚轮接触点处导轨的振动响应。
2 轮轨耦合高速电梯导轨振动特性仿真分析
2.1 工况描述
为了研究导轨表面不平度以及轮轨预紧力对导轨振动响应的影响规律,设计计算工况,分为导轨表面不平度对导轨振动响应的影响和预紧力大小对导轨振动响应的影响2种工况。分别将导轨表面不平度和轮轨预紧力设置为离散参数,每种工况下只针对一种参数进行变化从而分别得出导轨表面不平度和轮轨预紧力2个接触参数对导轨振动响应的影响规律。
2.2 导轨表面不平度参数化
导轨表面不平度样本本质上是期望为零的平稳随机过程,服从正态分布[20]。文章以服从正态分布的随机数模拟导轨表面不平度值。在讨论导轨表面不平整度对导轨振动响应的影响时,表面不平度的大小通过改变服从正态分布的随机数的标准差来实现。
2.3 模拟仿真
基于上述轿厢—滚轮—导轨耦合系统动力学模型,编制Matlab计算程序,计算流程如图2所示。以山东富士制御电梯有限公司某额定运行速度为4 m/s的高速电梯为研究对象进行模拟仿真,模拟仿真主要输入参数见表1,将变量离散思想与新型二步积分法结合,分别得出导轨随表面不平度变化的时程曲线和导轨随预紧力变化的时程曲线,进而分析考虑轮轨耦合状态下电梯导轨表面不平度和轮轨预紧力对导轨振动。

图2 仿真计算流程图
2.4 仿真结果分析与讨论
2.4.1 导轨表面不平度对导轨振动响应的影响
(1)仿真结果分析
在轮轨预紧力F为40 N条件下,分别取服从正态分布的导轨表面不平度随机数的标准差分别为0、5×10-6、1×10-5和 1.5×10-5m,分析其表面不平度对导轨振动响应的影响,结果如图3所示。

表1 模拟仿真主要输入参数表

图3 不同表面不平度下滚轮1接触点处导轨振动响应图
由图3可以看出,理想情况即光滑表面(表面不平度为零)下导轨仅有振动挠度(即导轨弯曲),表现为光滑的位移曲线;而无震荡(将由表面不平度引起的导轨某质点相对于光滑曲线某对应平衡点的微量位移称之为震荡)。模拟导轨表面不平度标准差由5×10-6m增大到5×10-5m,导轨振动曲线走势相同,挠度峰值基本相同,但是导轨震荡从无到有、由弱变强,说明导轨表面不平度主要影响导轨震荡。
(2)结果验证
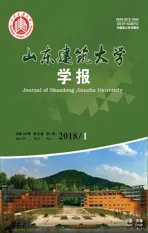
取导轨各跨 0、0.5、1、1.5、2、2.5、3、3.4 m处为观测点,模拟导轨表面不平度标准差分别为5×10-6、1×10-5、1.5×10-5m时,导轨各跨在观测点处的震荡幅值,其模拟结果见表2。由表2可知,各跨震荡峰值(表2中斜体数据)大都出现在跨中位置附近,且随着导轨表面不平度的增大,各跨震荡峰值总体上呈现增大趋势。
此外,由表2可知,导轨表面不平度标准差为1×10-5m时,导轨在2、3跨处的震荡峰值(表2中下划线数据)并不满足导轨震荡峰值随导轨表面不平度增大而增大的结论,其震荡峰值较小,其原因主要为
①观测点为导轨上的固定点,所取观测点并未取到导轨震荡峰值点,可能是振荡值较小处的点。
②所模拟的导轨表面不平度整体上符合正态分布,但对于个别点来说具有一定的随机性,不能排除观测点处所模拟出的导轨表面不平度值较小的可能性。
表2 不同不平度下导轨各跨固定点处震荡幅值表
2.4.2 预紧力大小对导轨振动响应的影响
模拟导轨表面不平度标准差为5×10-6m的情况下,改变预紧力大小,研究导轨表面不平度对电梯导轨振动响应的影响。图4的预紧力F分别取10、20、40 N时导轨的振动响应,图5为无预紧力的情况下导轨的振动响应。

图4 不同预紧力下与滚轮1接触点处导轨振动响应图

图5 无预紧力下与滚轮1接触点处导轨振动响应图
如图4所示,预紧力主要影响导轨振动挠度,且随着预紧力的增大导轨振动挠度逐渐增大。此外,随着预紧力的增大导轨震荡幅值有一定程度的减小。由图5可知,在无预紧力的情况下,虽然导轨的弯曲挠度下降,但是导轨震荡的幅值有所增加,这种情况下,必然会间接引起轿厢振动响应的加剧,降低电梯舒适度。可见,预紧力的存在,会使导轨的振动挠度有所增大,但同时也在一定程度上抑制了导轨的震荡。
3 结论
通过上述研究表明:
(1)对于高速电梯,导轨的水平振动响应不可忽略,表现出振动挠度和震荡2种形式。这种水平振动通过轿厢系统与导轨间的耦合作用传递到轿厢,进而降低乘客的乘坐舒适度。
(2)导轨表面不平度主要影响导轨震荡,且导轨震荡幅值随表面不平度增大而增大;光滑导轨仅存在导轨振动挠度而无震荡。
(3)轮轨预紧力对导轨振动挠度和震荡均有显著影响。预紧力分别为10、20、40 N时,导轨振动挠度幅值分别为1.9×10-5、3.4×10-5、6.8×10-5m,振动挠度近似成倍数增加,而导轨的震荡幅值逐渐减小。当轮轨间没有预紧力时,导轨的振动挠度较小,但表现出了强烈的震荡现象。因此,在减小预紧力以降低导轨振动挠度的同时,还应防止预紧力过小而导致的导轨震荡加剧。
参考文献:
[1]张国华,于克勇.钢丝绳对电梯垂直振动的影响分析[J].金属制品,2016,42(1):43-46.
[2]陈杰.高速电梯水平振动性能分析与导向系统设计优化及其应用研究[D].杭州:浙江大学,2016.
[3]傅武军,朱昌明.高速电梯水平振动建模及动态响应分析[J].机械设计与研究,2003,19(6):65-67.
[4]饶勇.高速电梯曳引系统多向耦合振动建模与减振设计技术及其应用[D].杭州:浙江大学,2016.
[5]王晶晶.基于滚动导靴—导轨接触模型的高速曳引电梯振动分析[J].科技与企业,2015(5):238.
[6]朱彤,吕风英,万会.电梯对重—导轨体系的水平振动试验和数值仿真研究[J].结构工程师,2017,33(2):175-181.
[7]李醒飞,张晨阳,李立京,等.电梯导轨对轿厢振动的影响[J].中国机械工程,2005,16(2):115-118.
[8]李立京,李醒飞,张国雄,等.电梯轿厢水平振动模型[J].起重运输机械,2002(5):3-5.
[9]冯永慧,张建武.高速电梯水平振动模型的建立与仿真[J].上海交通大学学报,2007,41(4):557-560.
[10]梅德庆,杜小强,陈子辰.基于滚动导靴—导轨接触模型的高速曳引电梯振动分析[J].机械工程学报,2009,45(5):264-270.
[11]尹纪财,芮延年,蒋黎明,等.高速电梯多自由度水平动态特性及其仿真的研究[J].机械设计,2011,28(10):70-73.
[12]李丹达.电梯轮轨耦合振动建模及分析[D].上海:同济大学,2006.
[13]郭克尖,李鸿光,孟光.滑动导向系统振动建模及动力学仿真研究[J].振动与冲击,2008,27(10):39-42.
[14]张鹏.变长度柔性提升系统纵向—横向受迫耦合振动分析[J].工程力学,2008,25(12):202-207.
[15]王少钦,夏禾.变速移动载荷作用下简支梁桥的动力响应及共振分析[J].振动击,2010,29(2):26-30.
[16]杨超,朱涛,杨冰,等.结构动力学中的广义多步显式积分算法[J].西南交通大学学报,2017(1):133-140.
[17]Zhai W M.Two simple fast integration methods for large-scale dynamic problems in engineering[J].International Journal for Numerical Methods in Engineering,1996,39(24):4199-4214.
[18]翟婉明.非线性结构动力分析的Newmark预测—校正积分模式[J].计算力学学报,1990(2):51-58.
[19]Banimahd M,Woodward P K,Kennedy J,etɑl..Behaviour of train-track interaction in stiffness transiton[J].Proceedings of the Institution of Civil Engineers-Transport,2012,165:205-214.
[20]王焕玲.表面粗糙度信号的统计误差特征分析[J].上海计量测试,2016,43(5):18-22.