一种车路协同半实物仿真系统的设计与实现
2018-04-13徐志刚王明亮赵佳乐
徐志刚,王明亮,张 玮,赵佳乐
(长安大学 信息工程学院,陕西 西安 710064)
0 引 言
随着计算机技术的迅速发展,仿真技术的应用在深度和广度上都达到了很高的水平。在交通领域,运用仿真技术构建一个半实物仿真平台,对交通系统的论证、研制、测试、改进等方面都起着十分重要的作用[1]。把行驶在公路上的车辆紧密排列成队,能够极大地增加同等道路条件下的车辆通行能力,因此,给车辆编队被认为是解决当前交通拥堵、事故频发、空气污染等问题最有效的方法之一[2]。随着先进车辆控制技术(AVCS)愈来愈成熟,车辆主动安全性能和可靠性能得到大幅提升。与此同时,车载硬件及软件模块也越来越复杂[3],导致了极为复杂的车辆系统结构和车载通信网络,从而使车辆控制仿真变得越来越困难,进一步的实车实验就会变得越来越昂贵和危险。大多数学者选择利用各种交通仿真工具和实验测试手段进行理论验证,然而考虑到实际情况的复杂性,如信号干扰、通信延时等使得仿真工具与实际环境有较大差异,利用实物对车辆编队进行实验是十分必要的。
半实物仿真技术是一种在仿真系统满足整体要求的条件下部分过程利用实物代替的技术,是车路协同系统设计、实验、性能优化测试强有力的工具。其优点主要有:能够对实际情况进行模拟,不会产生实际危险;利用半实物仿真,可以在真实世界中不能实现的极端条件下进行测试;利用半实物仿真可以在相对真实环境下发现系统的不足之处;能够加速开发流程,降低研发费用,减少开发时间[4]。
1 相关研究
荷兰应用科学研究机构TNO搭建了基于半实物仿真的智能车和道路系统的模拟实验VEHIL(vehicle hardware in the loop),用于测试车辆编队的巡航控制、起停控制、车车和车路通信、车队协同驾驶等功能。
目前比较成熟的车路协同仿真平台有德国柏林交通系统研究所(institution of transportation systems)的SUMO仿真平台,美国拉斯阿莫斯国家实验室(Los Alamos national laboretory)的TRANSINS交通仿真平台[5],此外法国的NEMIS、英国的PARAMICS等也开展了车队协同驾驶相关实验[6-11]。
虽然半实物仿真平台的搭建对于车路协同技术,车辆编队及车联网等相关技术的发展有至关重要的意义,但在国内的科研机构中却只有少数构建了半实物仿真平台,如军事交通学院的自动化模拟演练室、吉林大学的汽车仿真与控制实验室、国防科技大学的红旗系列、上海交通大学的Cybercar系列、交通运输部公路科学研究院的北京试验场、武汉理工大学的道路交通机电平台、长安大学构建的车路协同实验场[12-17]等。文中对长安大学道路交通工程技术研究中心构建的车路协同仿真平台做系统的介绍,并对车辆编队控制中的车辆跟随模型进行测试和验证。
2 车路协同半实物仿真系统
车路协同半实物仿真系统利用模块化思想设计任务,将系统划分为模拟道路、上位机、定位装置、通信网络及智能模型车辆等,如图1所示。

图1 车路协同半实物仿真系统组成
(1)模拟道路。
模拟道路是一个比例为1∶15的道路模型,可以用来开展车路协同技术相关的实验研究。微缩沙盘的面积约为15 m2,主体部分包括仿真道路、LED信息显示器及相关的交通设施,如图2所示。仿真道路为双车道,车道宽度为15 cm,道路表面呈磨砂面,具有直道与弯道。

图2 模拟道路
(2)上位机。
上位机主要用来运行相关的仿真控制软件,用于对车辆协同驾驶过程进行建模与控制。根据建立的协同场景模型,设计相关的协同控制算法,并进行仿真验证。将控制策略传输到模型车辆进行半实物仿真。仿真过程中在仿真控制软件上实时显示车辆协同驾驶信息,如速度、加速度、航向及车辆位置等信息,利用得到的车辆行驶信息,可以在线调整模型车辆所需的控制参数,便于协同策略的优化。
(3)定位装置。
用于对模拟道路上移动的模型车辆进行定位,并通过通信网络将定位数据发送给对应的模型车辆,为车辆间的协同提供数据基础。
(4)通信网络。
自组织通信网络主要是用来进行车-车/车-路通信,车-车通信是实现模型车辆在运动过程中与周围行驶车辆的信息交互,上位机通过车路通信的方式来监测和控制沙盘中的车辆运动状态,以及进行运行策略的发布。
(5)智能模型车辆。
模型车辆是仿真系统的被控对象。模型车上装配有微处理器和多种车载传感器,如加速度传感器、测速传感器、红外测距传感器、光电传感器、通信模块等。车载传感器用于采集自身的行驶状态信息,并通过通信网络将这些信息以固定的频率进行广播,同时也通过通信网络接收周围车辆广播的行驶信息以及上位机发送的控制信息及定位信息,车载微处理器对收集到的数据进行处理,根据不同的协同策略调整自身的行驶状态。
3 半实物仿真实验
3.1 场景描述
车辆跟随的一般过程主要包括三部分:感知和信息搜集、决策和控制过程以及跟随状态输出。首先,输入前车运动状态(车速、加速度、车距等);其次,驾驶员感知前车和自车的运动状态信息并进行分析,然后做出决策并调整车辆状态;最后,车辆根据驾驶员的控制跟随前车行驶,输出跟随车的运行状态。
车辆动力学模型:智能车在行驶过程中所承受的阻力主要有地面摩擦阻力、空气阻力、加速度阻力等,用一个等式表示如下:
(1)
其中,μ为摩擦系数;m为小车质量;g为重力加速度;θ为路面倾斜角;α为偏航角;fα()为阻力修正函数;δ为质量换算系数。
永磁直流电动机的机械特性如下:
(2)
其中,Ω为电机角速度;U为电枢端电压;Ra为电枢绕组电阻;Rj为电枢回路串入的调节电阻;CE为电动势常数;CT为转矩常数;Tem为电磁转矩;Φ为每极的磁通量。
假设小车以某个设定速度行驶,那么,在行驶过程中有Ft=F,根据电动机的特性,有Tem=T0+T2,空载转矩为T0=0,则
(3)
其中,T2为机械转矩;r为车轮半径。
假设小车在行驶过程中不存在滑动现象,则智能小车后轮驱动速度u=Ωr,根据式(2)和式(3)整理得到电机模型为:
(4)
其中
在传统交通环境中前车运动状态的感知和收集一般通过人工估计的方式来获取,由于不同的驾驶员,不同的交通环境,驾驶经验等因素的影响,通常情况下驾驶员估计的前车运动状态与真实运动数值之间存在较大误差。这种情况在引入车-车通信系统后将有巨大的改善[18]。
3.2 理论模型仿真
2000年,姜锐等[19]提出了全速度差(FVD)模型,该模型考虑了正负速度差对车辆动力学的影响,能够避免产生过高加速度的问题。
(5)
其中,a为敏感系数;Δvn(t)=vn+1(t)-vn(t);V(Δxn(t))为优化速度函数;λ为速度差项的权系数,采用分布假定函数:
(6)
其中,a,b和临界间距Δxc为常数。
上式表明,当车距的取值范围不同时,选取不同的速度差权系数来控制对优化速度的影响,车距越大,两车速度差的影响就越小,反之同理。

车辆启动过程的初始化分布:车队包括10辆车,每辆车的位置为:
xn(0)=(n-1)d,n=1,2,…,10
(7)
其中,d=7.4 m。
车队在启动之前,头车(n=10)处于静止状态,v10(0)=0 m/s。因模拟中采用Helbing优化速度函数,VH(7.4)=0 m/s,所以vn(0)=0,n=1,2,…,9。因此初始时刻车队静止。
边界条件:头车的优化速度VH(∞)=14.66,因为前方没车,在任何时候ΔvH=0。
仿真过程如图3所示。
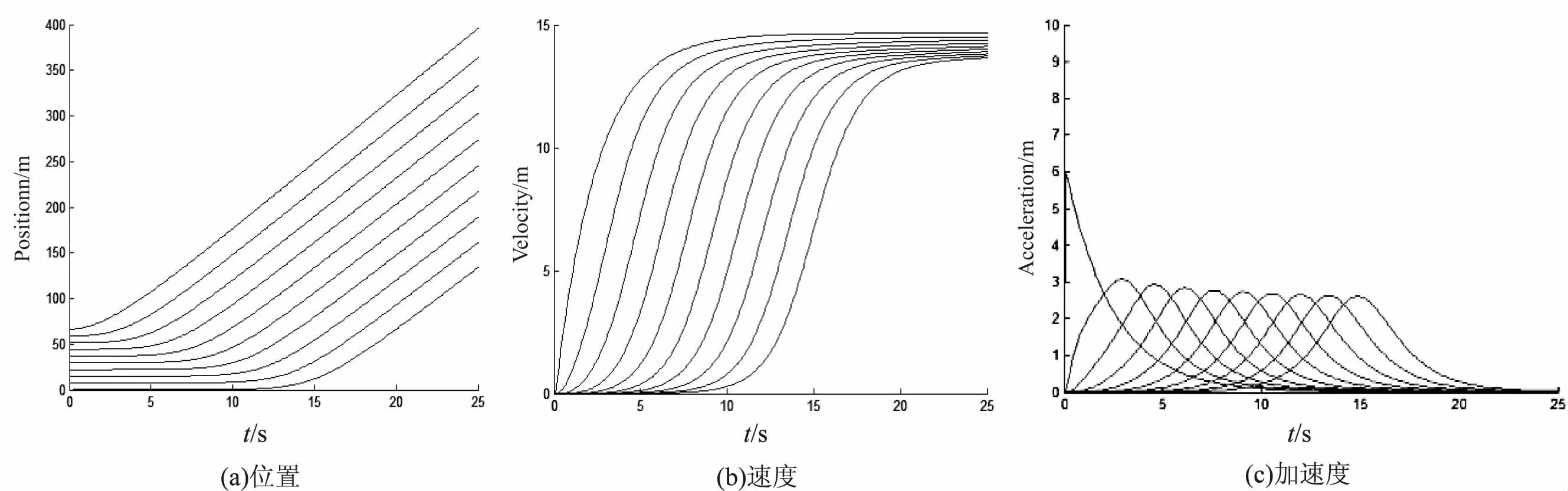
图3 FVD模型车队启动过程车辆运动状态仿真结果

FVD模型在车辆的速度控制、车队稳定性等方面具有较好的表现,可以考虑将其作为一种跟随控制策略加以应用,因此文中选取FVD模型作为车辆的控制模型,进行进一步的半实物仿真验证。
3.3 车辆跟随场景半实物仿真实验
3.3.1 方案设计
根据车辆跟随模型的要求,应用文中搭建的车路协同半实物仿真系统对跟随模型进行仿真验证。将基于理论模型的控制算法移植到模型车辆上,并让模型车在道路微缩沙盘上进行移动,测试的目的在于观察前后车之间的协同过程,将结果与理论模型的仿真结果进行对比,验证在半实物仿真环境下模型车辆的运动是否会出现与软件仿真相似的结果,以验证该方案的合理性,以及控制模型在半实物仿真环境下的稳定性及健壮性,为实物仿真提供理论基础。
选取4辆实验模型车辆,将车辆的参数通过无线网络实时进行交互。实验车辆分为两种,分别为头车和跟随车。头车为自由行驶状态,仿真控制系统通过向头车发送控制信息实现对头车的控制,进而观察当头车行驶状态发生改变时跟随车的调整过程。跟随车通过车载微处理机实时解析自身数据以及收到的前车的数据,并且将数据代入跟随控制模型,计算跟随车速,并实现协同式跟随。模型车辆跟随控制算法采用FVD模型,选取Helbing优化函数,由于上述模型是反映真实车辆运动的模型,无法直接将模型车辆的数据带入,故结合模型车辆与真实车辆的比例引入比例因子ε,将车辆模型的运动参数通过比例因子转化为真实车辆的运动参数。则模型小车的运动控制公式为:

(8)


初始化分布:4辆车排成一列,每辆车的位置为:
(9)
其中,d'=d/ε=0.37 m。
车队开始起步之前,头车处于静止状态。车辆运动信息以10 Hz的频率进行广播。定位数据同样以10 Hz的频率进行刷新。
3.3.2 结果分析
分别对车辆的启动和刹车场景进行实验,以验证文中搭建的半实物仿真系统能否正确地还原跟随场景,及对跟随模型在半实物仿真环境下的控制效果进行验证。
车辆启动和刹车半实物仿真实验结果分别如图4和图5所示。
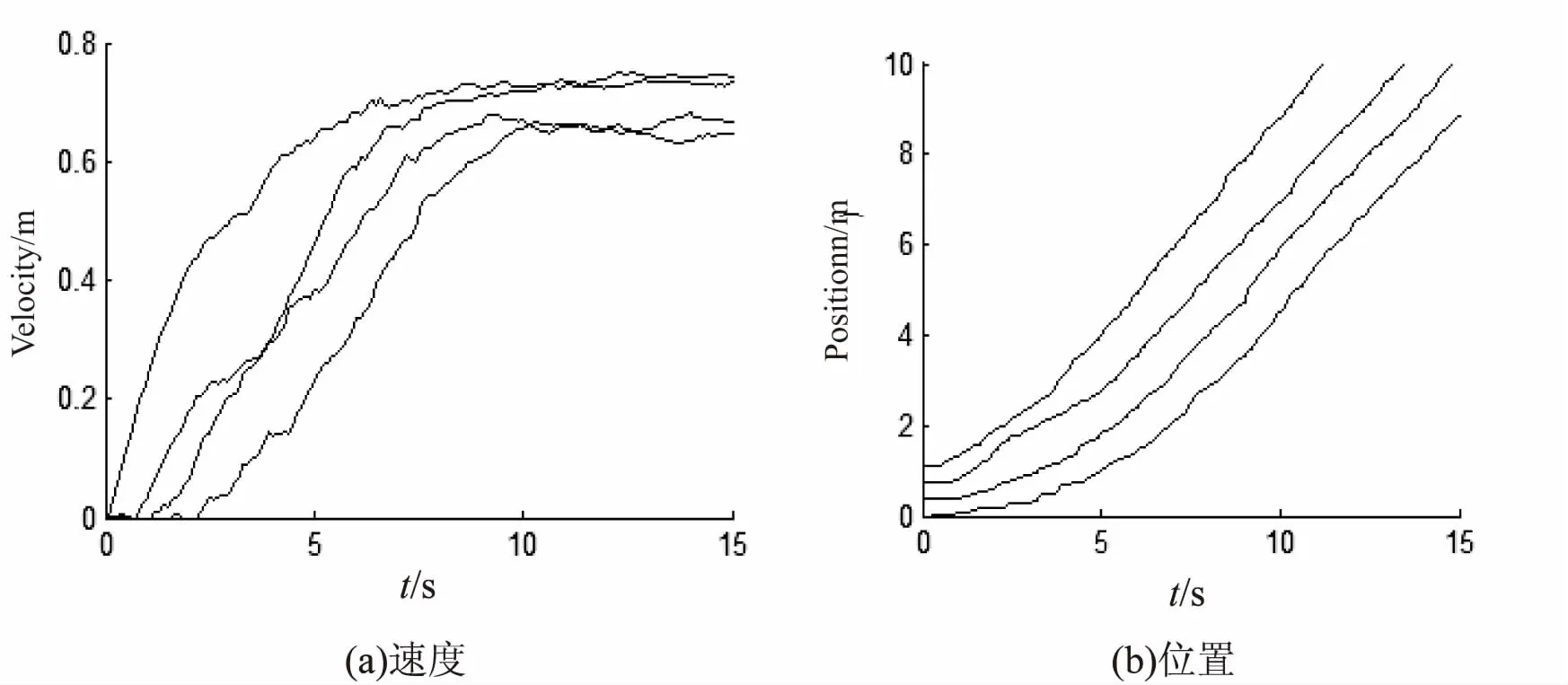
图4 车辆启动半实物仿真实验结果

图5 车辆刹车半实物仿真实验结果
通过对车队启动与刹车过程的实验结果进行分析可知:
(1)两组实验结果均与FVD模型数值仿真时的速度与位移变化曲线出现了相似的变化趋势。这说明搭建的半实物仿真系统,在一定程度上还原了车路协同环境下车辆跟随场景中车辆的协同过程。
(2)从启动过程的位移变化曲线可以看出,位移的变化趋势并不平滑而是会出现波动,这是由于定位装置的误差造成的,这使得车距信息也会受到误差的影响。最终造成对模型车辆状态的错误控制,造成车速与理想值有差距,导致车队进入稳定状态的时间后移。同时由于定位误差是始终存在的,这也会导致车速在优化速度附近波动。
(3)从刹车过程的位移变化曲线可以看出,在40 m处4辆车发生了碰撞。这是由于定位信息的误差造成的,因为当前后车的间距越小,误差对车距准确性的影响就越大,进而对模型车辆的运动状态的影响就越大,导致车辆相撞。
综上,文中搭建的半实物仿真系统,在一定程度上还原了车路协同环境下车辆跟随场景中车辆的协同过程,并且发现理论模型忽视了真实环境中存在的定位误差的影响导致车辆发生碰撞,存在一定的缺陷。
4 结束语
对车路协同半实物仿真平台的软硬件组成、系统结构、原理和技术进行了详细的分析,利用构建的车路协同半实物仿真系统,对基于V2V的车路协同场景进行了半实物模拟仿真实验。实时采集了实验过程中不同场景下模型车辆的行驶状态数据,并对其进行了分析。研究结果表明,该系统能够较真实地还原典型的交通场景,验证控制模型的可用性,并能反映出潜在的物理因素对控制模型的影响,为理论模型的进一步完善和真实环境下的实验提供依据。
鉴于半实物仿真的各种益处,开展半实物仿真将会在越来越多的领域兴起,半实物仿真的规范和技术仍然处于不断发展和完善中。
参考文献:
[1] 李小华.我国计算机应用的发展现状与趋势预测[J].信息与电脑:理论版,2014(1):179-180.
[2] 常 城.汽车电子半实物仿真平台的研究[D].大连:大连理工大学,2008.
[3] 张晓杰,姜同敏,王晓峰.提高计算机网络可靠性的方法研究[J].计算机工程与设计,2010,31(5):990-994.
[4] VANHOLME B,GRUYER D,GLASER S,et al.Fast prototyping of a highly autonomous cooperative driving system for public roads[C]//Proceedings of IEEE intelligent vehicles symposium.[s.l.]:IEEE,2010:135-142.
[5] 何智伟.智能车路系统中汽车编队控制建模方法研究[D].武汉:武汉理工大学,2009.
[6] RAJAMANI R,CHOI S B,LAW B K,et al.Design and experimental implementation of longitudinal control for a platoon of automated vehicles[J].Journal of Dynamic Systems Measurement and Control,2000,122(3):470-476.
[7] MILANES V,ALONSO J,BOURAOUI L,et al.Cooperative maneuvering in close environments among cybercars and dual-mode cars[J].IEEE Transactions on Intelligent Transportation Systems,2011,12(1):15-24.
[8] VAN DEN BROEK T H A,NETTEN B D,HOEDEMAEKER M,et al.The experimental setup of a large field operational test for cooperative driving vehicles at the A270[C]//13th IEEE international conference on intelligent transportation system.[s.l.]:IEEE,2012:198-203.
[9] REICHARDT D,MIGLIETTA M,MORETTI L,et al.CarTALK 2000-safe and comfortable driving based upon inter-vehicle-communication[C]//Proceeding of IEEE intelligent vehicles symposium.[s.l.]:IEEE,2002:545-550.
[10] KATO S,TSUGAWA S,TOKUDA K.Vehicle control algorithm for cooperative driving with automated vehicles and intervehicle communications[J].IEEE Transactions on Intelligent Transportation Systems,2002,3(3):155-161.
[11] XU Z,ZHAO X,LI H,et al.Initial classification algorithm for pavement distress images using features fusion of texture and shape[C]//95th annual meeting on transportation research board.[s.l.]:[s.n.],2016.
[12] 赵祥模,惠 飞,史 昕,等.泛在交通信息服务系统的概念、架构与关键技术[J].交通运输工程学报,2014,14(4):105-115.
[13] 白国柱,赵祥模,徐志刚,等.车路通信环境下 TD-LTE无线资源调度建模与仿真[J].现代电子技术,2014,37(13):1-5.
[14] 陈 婷,赵祥模,代 亮,等.车辆通信接入系统的自适应传输模式选择策略[J].交通运输工程学报,2014,14(1):119-126.
[15] 赵祥模,徐志刚,陈 婷,等.一种基于LTE技术的车路通信测试平台及测试方法:CN,CN103533559A[P].2014-01-22.
[16] 李骁驰.基于4G-LTE与WAVE的车联网无线通信平台构建与性能测试[D].西安:长安大学,2015.
[17] 徐志刚,任 亮,程 鑫,等.一种基于车联网的智能车路协同系统仿真模型平台:CN,CN201320124681.3[P].2013-10-09.
[18] 鲁光泉,王云鹏,田大新.车车协同安全控制技术[M].北京:科学出版社,2014.
[19] 姜 锐,吴清松,朱祚金.一种新的交通流动力学模型[J].科学通报,2000,45(17):1895-1899.
