基于改进亮度序描述子的刀闸状态识别
2018-04-12张金锋孙明刚邵先锋过其峰杨建旭洪泽
张金锋 孙明刚 邵先锋 过其峰 杨建旭 洪泽
摘要:为了消除非线性亮度变化对电力系统中的绝缘子定位和刀闸状态识别的影响,提出了一种基于改进亮度序(LIOP)描述子的刀闸状态识别算法。首先对图像进行必要的预处理以去除噪声的污染;其次提取感兴趣的目标区域,该区域内应包含绝缘子和刀闸等目标信息;然后利用改进的亮度序描述子来精确定位绝缘子,这是由于亮度序描述子对图像非线性亮度变化、尺度变换和旋转变化等具有一定的不变性;最后利用改进的Hough变换来确定刀闸的位置,并计算直线段间的角度来对闸刀状态进行识别。实验结果说明了该方法可以精确地定位绝缘子和识别刀闸的状态,适用于实时性要求较高的电力系统。
关键词:非线性亮度变化;亮度序描述子;改进的Hough变换;绝缘子定位;刀闸状态识别
中图分类号:TP391.41
文献标志码:A
0 引 言
在电力系统中监控电力线上的设备状态是最重要的一项工作,为了提高实时监控的效率,传统的人工监控技术已经被新技术所取代。计算机视觉和图像处理技术可以快速高效地检测出电力线上的缺陷,而且通过自动检测和识别输电线上的电力设备,可以大大降低人工成本[1]。最近研究者们提出了许多在可见光图像中利用计算机视觉和图像处理技术来识别刀闸或绝缘子状态的算法[2-5]。
毫无疑问正确检测绝缘子位置将有助于精确判断和分析刀闸的状态。文献[6]利用改进的Otsu算法和数学形态学来分割绝缘子,但在复杂背景下该算法未能达到理想的效果。文献[7]提出了一种基于颜色分割算法来提取红外图像中的目标区域,但该算法要求被检测目标具有较高的亮度值。文献[8]利用全局最小主动轮廓模型( Global Minimi-zation Active Contour,GMAC)来分割绝缘子,该算法具有较好的分割效果,但是该算法使用的全局特征需要大量的计算时间,而基于局部特征的目标检测算法是更加有效的,许多目标检测算法都利用了局部特征。文献[9]综述了局部特征在纹理分类和目标分类中的应用。文献[10]通过训练局部梯度描述子和投票策略来定位绝缘子。文献[11]利用词袋模型(Bag Of Words model,BOW)和空间稀疏编码来构建有效的结构型目标描述子,并将该描述子应用到遥感图像目标检测算法中。文献[12]提出一种基于仿射不变特征和聚类分析法来检测重复结构的新方法,然而该方法仅仅适用于相似目标出现在相同图像里。文献[13]利用PCNN( PulseCoupled Neural Network)算法来分割绝缘子图像,该算法在某种程度上抑制了背景噪声,然后将单个绝缘子作为模板,利用广义的Hough变换(Generalized Hough Transform.GHT)[14]粗略的定位绝缘子。文献[15]提出了一种基于自适应神经模糊推理系统(Adaptive Neuro-Fuzzy InferenceSystem,ANFIS)的绝缘子检测方法,该方法利用k-means聚类获得所需集群、对沿行列和对角线都适当的所有像素点绘制最小矩形框、利用ANFIS获得绝缘子的定位,该方法在背景相对简单的情况下可以实现多个绝缘子的定位,但在复杂背景下它不能精确定位绝缘子的位置。文献[16]利用Hough变换和SVM( Support Vector Machine)来提取图像中的绝缘子,但SVM需要很多数据集作为输入来训练样本,这可能会增加绝缘子定位算法的计算量和复杂性。基于图像处理技术,文献[4]提出了一种刀闸状态识别算法,该算法首先提取刀闸目标的SIFT(Scale Invariant Feature Transform)特征,进而构建KD树,利用聚类分析方法对特征进行匹配,从而完成对刀闸状态的识别。文献[5]利用改进的Hough变换来自动识别刀闸状态。该方法是简单快速,具有较高的刀闸状态识别精度,适合應用于实时监控电力系统中。
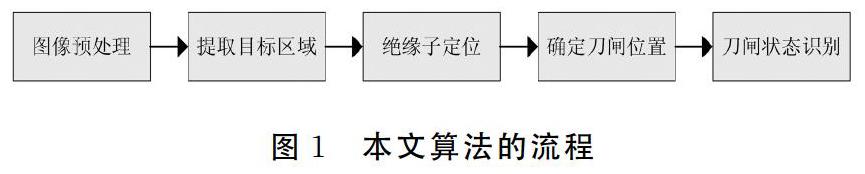
当在非线性亮度背景下处理绝缘子和刀闸目标时,上述方法要么无能为力,要么具有较高的计算量和复杂性。为了解决非线性亮度下刀闸状态识别的问题,本文提出了一种基于亮度序描述子的刀闸状态识别算法,首先对图像进行必要的预处理以减少噪声的污染。其次提取感兴趣的目标区域,该区域内应包含绝缘子和刀闸等目标信息。然后利用亮度序描述子和匹配策略来精确定位绝缘子,这是由于亮度序描述子对图像非线性亮度变化、尺度变换和旋转变化等具有一定的不变性。因为刀闸和绝缘子总是相辅相成的,确定绝缘子之后利用改进的Hough变换很容易可以确定刀闸的位置。最后通过计算直线段间的角度来判断闸刀的状态,该算法流程图如图1。
1 预处理和目标区域提取
在进行图像分析之前,需要对包含绝缘子和刀闸等目标的可见光图像进行必要的预处理以减少噪声等因素的影响。首先利用5×5的高斯核(其标准差为σ=1)滤波器对图像进行平滑操作以减少噪声的影响。其次,利用直方图均衡化来增强图像的对比度,以消除反射光对绝缘子和刀闸定位的影响。然后利用阈值分割法获得二值图像以实现前景和背景的分离,由于在生成二值图像的过程中会产生椒盐噪声,因此利用中值滤波器再一次进行图像平滑操作。二值图像中往往存在很多孔洞且边缘是模糊的,因此需要利用形态学滤波器对二值图像进行侵蚀与膨胀操作,将内孔填充且使得边缘变的平滑且清晰,移除区域面积小于某阈值的区域,该阈值设置为10。图像预处理的目的是得到清晰的二值化图像,可以提高绝缘子和刀闸定位的精度。最后利用Canny算子来获得图像边缘,在图像边缘中选取最大面积的闭合区域作为感兴趣的目标区域,该区域应该包含绝缘子和刀闸等感兴趣目标,由此可见本文仅选取原始图像中最主要的一组绝缘子和刀闸目标,其它组的绝缘子和刀闸目标操作与本文一致。
2 绝缘子定位策略
绝缘子是电力系统中不可或缺的绝缘控件,在高压输电线路中起到举足轻重的作用。绝缘子的定位是刀闸状态识别的重要步骤,精确定位绝缘子就可以很容易的检测刀闸的位置并判断刀闸的状态(闭合或断开)。局部不变特征具有一定的尺度、亮度、旋转和遮挡不变性,可以应用于电力设备目标检测中,其步骤通常包括三个:局部特征检测、特征描述子的生产和特征匹配。由于非线性亮度变化严重影响了绝缘子检测和定位算法的精确,因此本文引入亮度序描述子来抑制非线性亮度变化对绝缘子定位的影响。
研究者们提出了很多局部特征检测的方法,如H arris角点检测[17]、DoG (Difference ofGaussian)特征检测[18]、Harris-af fine区域检测[19]、Hessiar:raffine区域检测算法[20]等。由于仿射协变区域的形状自适应于图像几何形变、视角变化和亮度变化等,Hessian-Affine区域检测算法运用多尺度迭代算法获得仿射不变特征,可以检测出更多特征区域且具有较高准确性,能有效解决图像遮挡或局部畸变的问题,因此本文采用Hessian-Affine区域检测算法来获取特征和特征区域。
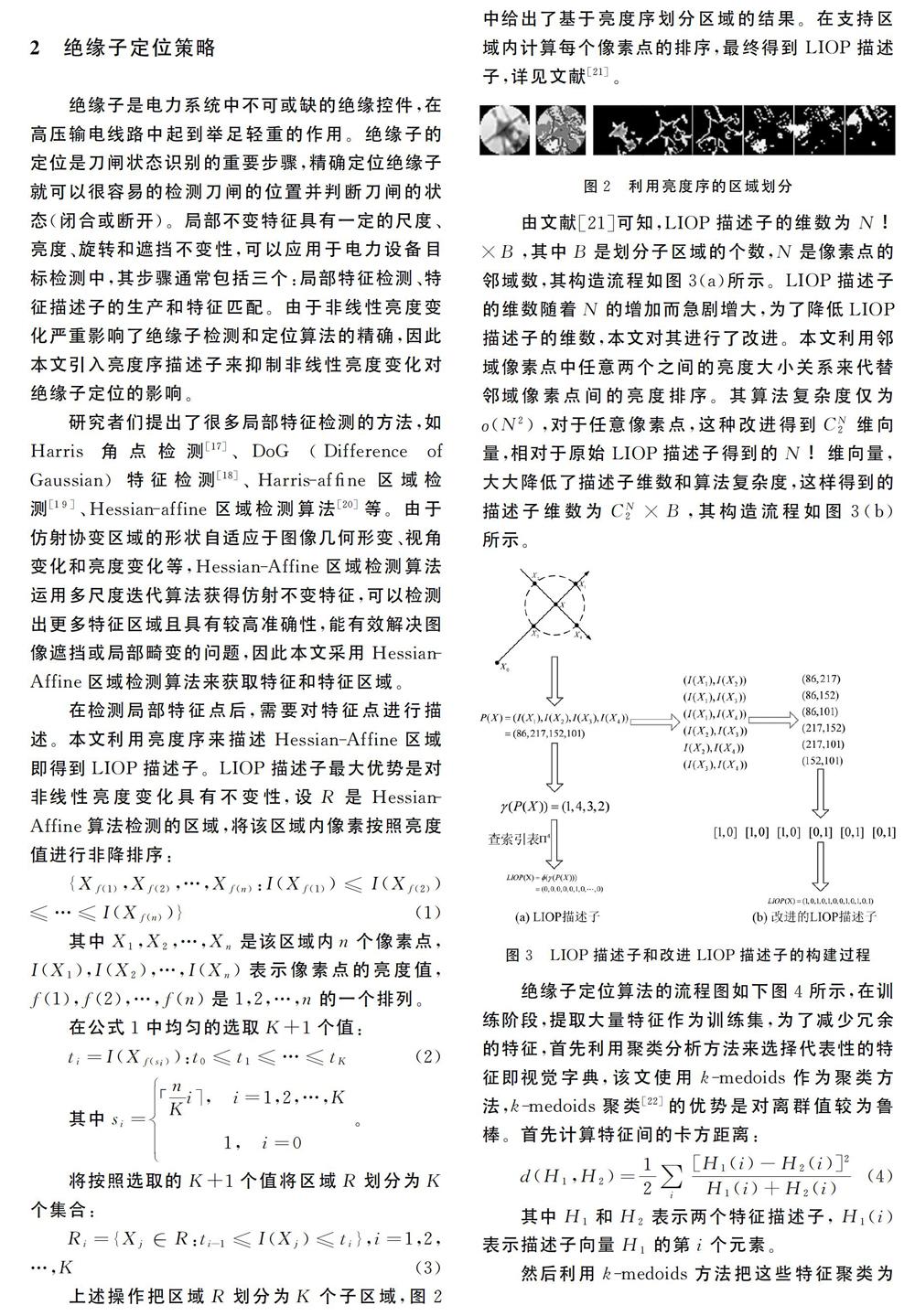
在检测局部特征点后,需要对特征点进行描述。本文利用亮度序来描述Hessian-Affine区域即得到LIOP描述子。LIOP描述子最大优势是对非线性亮度变化具有不变性,设R是Hessian-Affine算法检测的区域,将该区域内像素按照亮度值进行非降排序:
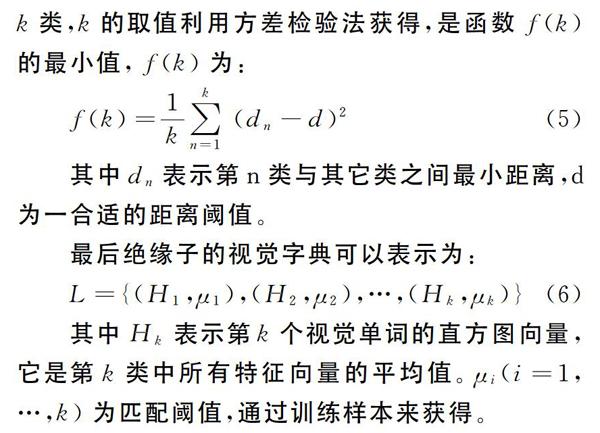
由文献[21]可知,LIOP描述子的维数为N!×B,其中B是划分子区域的个数,N是像素点的邻域数,其构造流程如图3(a)所示。LIOP描述子的维数随着N的增加而急剧增大,为了降低LIOP描述子的维数,本文对其进行了改进。本文利用邻域像素点中任意两个之间的亮度大小关系来代替邻域像素点间的亮度排序。其算法复杂度仅为o(N2),对于任意像素点,这种改进得到CN2维向量,相对于原始LIOP描述子得到的N!维向量,大大降低了描述子维数和算法复杂度,这样得到的描述子维数为CN2×B,其构造流程如图3(b)所示。
绝缘子定位算法的流程图如下图4所示,在训练阶段,提取大量特征作为训练集,为了減少冗余的特征,首先利用聚类分析方法来选择代表性的特征即视觉字典,该文使用k-medoids作为聚类方法,k-medoids聚类[22]的优势是对离群值较为鲁棒。首先计算特征间的卡方距离:
其中σ表示支持区域的尺度。使用阈值对投票矩阵进行处理,便可以获得绝缘子的区域。
3 刀闸位置定位和状态识别
绝缘子定位后,很容易获取刀闸的位置,刀闸一定位于检测的两个绝缘子之间。刀闸的两个刀臂可以用直线段来表示,本文利用改进的Hough变换来提取直线段。Hough变换是一种简单高效的提取边缘特征的方法,可以提取直线、圆、椭圆、曲线甚至任意形状的边缘[23]。Hough变换最突出的优点是把相对困难的全局检测问题转化为在参数空间中相对容易的局部峰值提取问题。Hough变换对于局部瑕疵是不敏感地,对随机噪声是鲁棒的,适用于并行处理,其具有很多优异性能,常用于图像处理、模式识别和计算机视觉中[23]。
传统的Hough变换把变换域离散化为许多子区域,并计算子区域内聚集点的数目,然而离散化过程不可避免地会产生统计误差[24]。在本文中,线检测算法从长到短的顺序进行直线检测,最长直线被检测后,为了不影响下一直线的检测,其上的所有点将在变换域内被去除,直到最后一条直线被检测。采用这种方式,虽然变换域仍是离散的,但已检测直线上的所有点全被去除,这样就消除了由离散化而产生的统计误差。
刀闸必然位于两个检测的绝缘子之间,如果没有在两个绝缘子之间的区域内检测到刀闸直线,则认为该刀闸处于断开状态。对于刀闸,若处于闭合状态两,则个刀臂之间的夹角应该在一个区间内。若检测的两个刀臂对应直线段间的测量夹角不在此区间内,则说明该刀闸处于断开状态。因此检测到的直线段之间的夹角可以反应刀闸的闭合/断开状态,而直线段间的夹角可以通过几何关系来获得。对于两个非平行的直线段,可以构造一个三角形,直线段间的夹角可以就可以根据余弦定理来获得。若两刀臂间的夹角与180°差的绝对值小于某个阈值,则认为该刀闸处于闭合状态,否则处于断开状态,该阈值取经验值9。
4 实验结果与分析
本文使用100个含有绝缘子的图像区域和100个仅含背景的图像区域来训练样本,使用50个含有绝缘子和刀闸的图像作为测试样本,所有样本来源于合肥某小区变电站,通过摄像机拍摄所得,其特点是在不同的非线性亮度变化下获取的。实验是在Windows 7环境下,编译软件为VisualStudi0 2010和OpenCV 2.4.9,实验硬件为Pentium Dual-Core CPU 2.50 GHz。
图5是本文算法对绝缘子定位和刀闸状态识别的结果示例,从图中可知,图像中含有多组绝缘子和刀闸目标,本文仅选取最主要的一组绝缘子和刀闸目标,其它组的识别结果与本文一致。图中不规则区域代表检测的一个绝缘子区域,该区域不仅包含绝缘子目标,一般还包含刀臂、传输线、底座等目标。矩形区域代表本文算法定位的绝缘子区域,可以看出,该算法具有较好的定位精度,区域内的其它电力设备会影响绝缘子的定位,如图5(b)中钢架的遮挡一定程度上影响了该算法的精度,但仍有很好的定位效果,这说明本文算法具有较强的鲁棒性。此外图5中四组图像是在不同的光照强度下获得的,这说明基于亮度序描述子的绝缘子定位算法对非线性亮度变化具有一定的不变性。图5中直线代表改进Hough变换检测的刀臂位置,注意Hough变换可能检测到许多近似平行的刀臂直线,将这些直线进行拟合,得到图中黄色的直线。
从图5(a)和(b)可以得出,其刀臂对应直线(图中直线)之间夹角分别是176.35°和174.28,根据刀闸状态判断条件,该夹角与180°差的绝对值小于预先设定阈值9,则说明这两个刀闸都处于闭合状态。而从图5(c)和(d)中得知,两幅刀闸图像中刀臂直线(图中直线)之间夹角分别是153.19°和23.41°,其与180°差的绝对值远远大于设定阈值,则说明这两个刀闸都处于断开状态。
表1是LIOP和改进LIOP描述子在不同参数下刀闸状态识别精度,可知随着N和B的增加,算法识别精度也随之提高。但随着N的增加,描述子的维数也随之急剧提高,如N-4,B-6时LIOP(改进的LIOP)描述子维数为144(72),而当N-8,B-6时LIOP(改进的LIOP)描述子维数却达到241920(168),因此本文设置N=4。随着参数B的增加,算法识别精度的提高幅度越来越小,为了平衡算法的维数和精度,本文设置N=6。同时也可以看出本文改进的LIOP描述子的优势,即同等参数条件下当LIOP描述子维数达到241920时,改进的LIOP描述子维数仅为168°表2是使用不同局部描述子时的刀闸状态识别精度和识别效率,所使用的描述子分别为改进的LIOP、LIOP和SIFT,本文中LIOP描述子参数设置为N=4和B=6,因此LIOP描述子的维数是144,而本文改进的LIOP描述子维数是72,SIFT描述子维数为128°从表2中结果可知,本文改进的LIOP描述子在一定程度上提高了识别精度,降低了算法复杂度。表3是在不同算法下的识别精度和识别效率,可见,相对于其它算法,本文刀闸识别算法具有较高的识别精度和较快的运行速率。
5 結语
绝缘子定位和刀闸状态识别是电力传输系统中至关重要的问题,为了解决非线性亮度变换下刀闸状态识别问题,本文提出了一种基于亮度序描述子的刀闸状态识别算法。该算法利用对非线性亮度变化、尺度变换、旋转变化和图像遮挡等具有一定不变性的亮度序描述子来精确定位绝缘子,然后在两个绝缘子之间很容易的利用改进Hough变换获取刀闸位置,并利用刀臂之间的夹角判断刀闸的状态。从实验结果可以看出,本文算法可以较为准确的定位绝缘子的位置和识别刀闸的状态,是一种较为简单快速的刀闸状态识别算法。
参考文献
[1] LIAO S,AN J.A robust insulator detection algorithm basedon local features and spatial orders for aerial images [J].IEEE Geoscience and Remote Sensing Letters,2015,12(5):963-967.
[2] REDDY M J B,CHANDRA B K,MOHANTA D K.Condition monitoring of 11 kV distribution system insulatorsincorporating complex imagery using combined DOST-SVMapproach [J].IEEE Transactions on Dielectrics and ElectricalInsulation,2013,20(2):664-674.
[3] MURTHY V S,GUPTA S,MOHANTA D K.Digitalimageprocessing approach using combined wavelet hidden Markovmodel (HMM) for well-being analysis of insulators [J].IETImage Processing,2011,5(2):171-183.
[4]
YAN B,CHEN H,HUANG W.Study on the method ofswitch state detection based on image recognition insubstation sequence control[C],/Proceedings of the 2014International Conference on Power System Technology.Chengdu,China:IEEE, 2014: 2504- 2510.
[5] ZHANG G7ZHANG D,LI D,et al.The automatic identifica-tion method of switch state [J].lnternational Journal of Sim-ulation:Systems,Science and Technology; 2016 ,17( 19): 21.1- 21.4.
[6]
JIN L,ZHANG D.Contamination grades recognition ofceramic insulators using fused features of infrared and ultra-violet images [J].Energies,2015 ,8(2):837- 858.
[7] JAFFERY Z A,DUBEY A K.Design of early fault detectiontechnique for electrical assets using infrared thermograms[J].International Journal of Electrical Power and Energy Sys-tems,2014,63:753-759.
[8]
WU Q,AN J,LIN B.A texture segmentation algorithm basedon PCA and global minimization active contour model for aer-ial insulator images [J].IEEE Journal of Selected Topics inApplied Earth Observations and Remote Sensing, 2012,5(5):1509-1518.
[9]
ZHANG J G,MARSZALEK M,SCHMID C.Local featuresand kernels for classification of texture and object categories:a comprehensive study [C]// Proceedings of the 2006 Con-ference on Computer Vision and Pattern Recognition Work-shop.New York:IEEE,2006:13-21.
[10]
OBERWEGER M,WENDEL A,BISCHOF H.Visual recog-nition and fault detection for power line insulators [C]//Proceedings of the 19th Computer Vision Winter Workshop.Krtiny,Czech Republic:lnstitute of Computer Graphics andVision,2014,1-8.
[11]
SUN H,SUN X,WANG H,Li Y,et al.Automatic target de-tection in higlrresolution remote sensing images usingspatial sparse coding bag-of-words model [J].IEEE Geosci-ence and Remote Sensing Letters,2012,9 (1):109 -113.
[12]
JADIN M S,TAIB S,GHAZALI K H.Finding region of in-terest in the infrared image of electrical installation [Jl.In-frared Physics and Technology,2015 ,71:329- 338.
[13] 郑涛,基于PCNN的航拍绝缘子图像的分割及定位研究[D].大连:大连海事大学,2011:23-45.
[14]
WINDSOR C G,CAPINERI L,FALORNI P.A data pairla-beled generalized Hough transform for radar location of buried objects [J].IEEE Geoscience and Remote Sensing Let-ters,2014,11(1):124-127
[15] REDDY M J B,CHANDRA B K,and MOHANTA D K.ADOST based approach for the condition monitoring of llkVdistribution line insulators [J].IEEE Transactions on Die-lectrics and Electrical Insulation,2011,18(2):588 - 595.
[16]
MURTHY V S,Tarakanath K,MOHANTA D K,et al.ln-sulator condition analysis for overhead distribution linesusmg comhned wavelet Support Vector Machine (SVM)[J].IEEE Transactions on Dielectrics and Electrical Insula-tion,2010,17(1):89-99.
[17] HARRIS C,STEPHENS M.A combined corner and edgedetection [C]// Proceedings of the 4th Alvey Vision Con-ference.Manchester, UK: Elsevier,1988:147 - 152.
[18] LOWE D G.Distinctive image features from scale-invariantkeypoints [J].International Journal of Computer Vision,2004,60,(2) :91-110.
[19] MIKOLAJCZYK K,SCHMID C.Scale and affine invariantinterest point detectors[J].International Journal ofComputer Vision,2004,60, (1):63- 86.
[20] MIKOLAJCZYK K,TUYTELAARS T,SCHMID C,et al.A comparison of affine region detectors [J].InternationalJournal of Computer Vision,2005,65, (1/2):43- 72.
[21] WANG Z,FAN B,WU F.Local intensity order pattern forfeature description [C]// Proceedings of the 2011 IEEE In-ternational Conference on Computer Vision. Barcelona:IEEE,2011:603-610.
[22] PARK H S,JUN C H.A simple and fast algorithm for K-medoids clustering [J].Expert Systems with Applications,2009,36(2) :3336-3341.
[23] REN D,WANG Q,SUN F.A fast and effective algorithmbased on improved Hough transform [J]. Journal of theIndian Society of Remote Sensing,2016,44(3):465-469.
[24]丁四海,數字图像识别用于电气控制柜开关状态检测的研究[D].上海:上海交通大学,2012:43-47.
