深空测控网干涉测量系统在“鹊桥”任务中的应用分析
2018-04-12王美陈略韩松涛路伟涛段建锋任天鹏李黎
王美,陈略,韩松涛,路伟涛,段建锋,任天鹏,李黎
(北京航天飞行控制中心,北京 100094)
引 言
按照探月工程任务规划,“嫦娥4号”将首次实现我国月球背面软着陆及巡视勘察。任务分为两个阶段,分别为发射“鹊桥”中继卫星阶段和发射着陆器及巡视器组合体阶段。2018年5月21日,利用“长征4号”丙遥27运载火箭在西昌卫星发射中心发射了“鹊桥”,着陆器及巡视器组合体于12月8日凌晨发射,首次实现了利用地月L2点中继星对月球背面的目标测控。“鹊桥”在地面控制下,经历了地月转移段、近月制动段后飞向了地月L2点,已运行于L2点Halo轨道。“鹊桥”为着巡组合体动力下降和两器分离提供中继测控支持,为着陆器的月面工作以及巡视器的遥操作提供中继服务。
射电干涉测量技术是目前分辨率最高的天文观测技术,能获得亚毫角秒量级的极高空间分辨率,相当于在地球上能分辨出月球上篮球大小的面积,也能够以毫米的精度测量上千千米的基线长度。在天体物理、大地测量等领域得到了广泛应用。也由于其高测量精度和高分辨率,很早就被应用于空间探测器,特别是深空探测器的定位导航,对传统测距、测速技术形成了有效补充[1-4]。
各个国家的航天机构都对干涉测量技术进行了研究及应用,美国深空网利用干涉测量技术有力地支撑了其空间探测任务,如“阿波罗”系列任务、“奥德赛”火星探测任务、“机遇号”及“勇气号”等都有应用。欧洲也建立了自己的VLBI(Very Long Baseline Interferometry)网EVN(European VLBI Network),并将该技术应用于诸如“金星快车”等任务,俄罗斯早期利用该技术基于“韦加号”飞船探测了金星大气,日本也成功地将该技术应用于SELENE(SELenological and Engineering Explore)等任务。
以中科院上海天文台为代表的科研机构进行了VLBI技术研究,依托中国VLBI网,有力地支持了我国历次探月任务。随着我国深空探测任务的逐步展开,对测控精度提出了更高要求,中国深空网的建设步伐也在不断加快。2013年,佳木斯及喀什深空站初步建成,配备了干涉测量设备,我国测控网初步具备了干涉测量能力[5]。后期,南美深空站和纳米比亚站干涉测量系统将陆续入网参加干涉测量任务,使我国具备全时段深空干涉测量覆盖能力,预期我国测控网在未来的深空探测任务中将发挥越来越大的作用[6]。本文主要论述深空测控网在“鹊桥”中继星任务中的应用。
1 差分干涉测量原理
甚长基线干涉测量的基本原理是利用两测站同时接收目标航天器或射电源的下行信号,对两测站接收的同源信号进行相关处理,利用得到的相关相位信息提取同源信号到达两测站的时延差,进而得到目标相对于测站的角位置信息[7],具体如图1所示。
两测站接收同源信号到达两站的时延差为
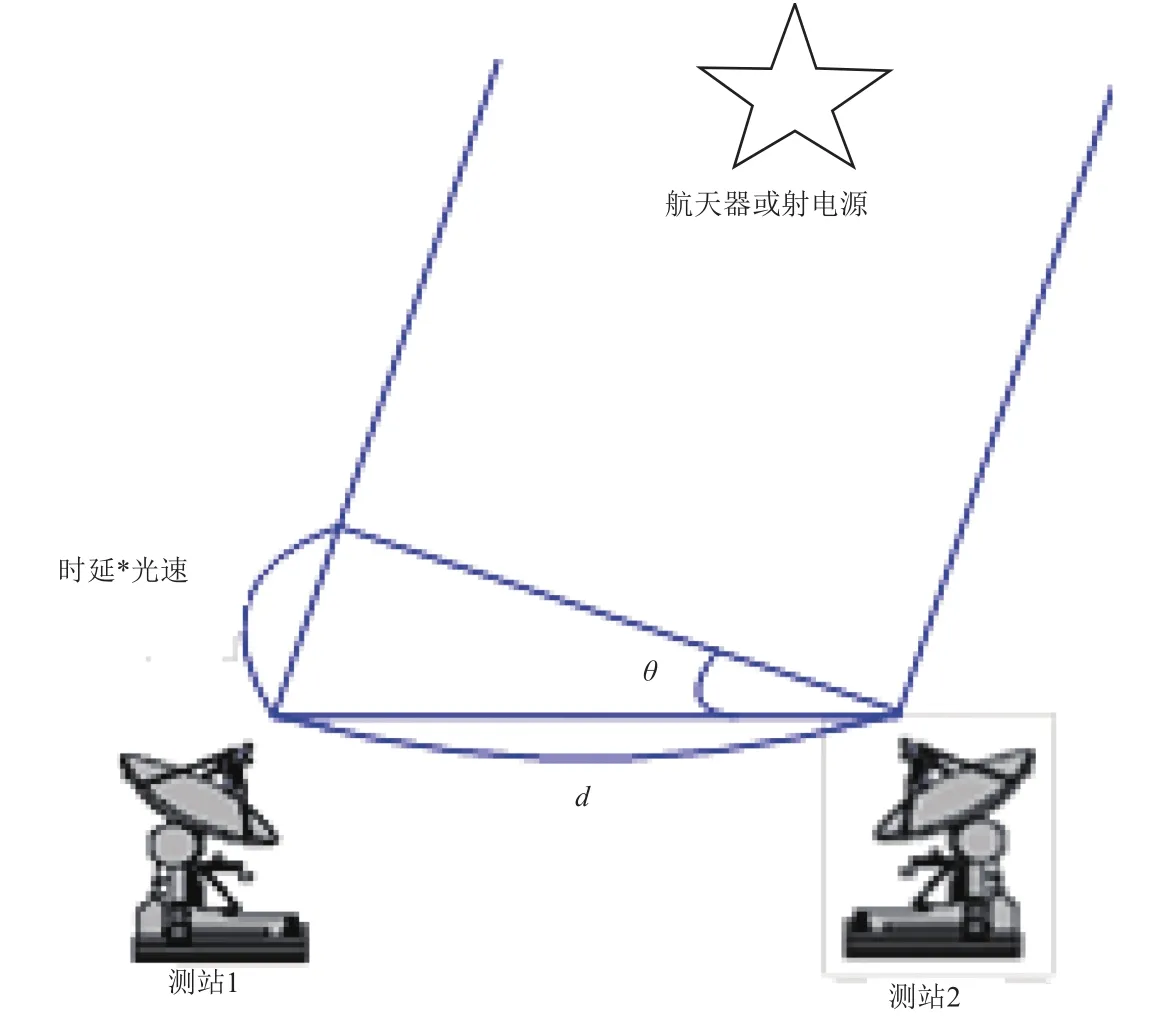
图1 干涉测量原理图Fig.1 Principle of VLBI

其中:c表示光速;d表示两测站的基线长度信息。
由式(1)可知角度测量量与基线长度成反比,基线越长所测量的角度精度越高,地球上的最长基线为地球直径,但是基线越长同样限制了对目标的观测共视时长。
理论上,干涉测量的时延结果仅与探测器及测站位置有关,实际的测量过程中会引入传播介质时延(对流层、电离层、行星际介质)、测站设备时延、测站钟差、链路时延等因素引起的误差[5],也即

其中:τ表示总的时延观测量;τg表示几何构型时的时延值;τc表示测站钟差引入的测量误差;τs表示传播介质引入的测量误差;τeq表示测站设备链路引入的测量误差。
为消除上述测量误差,一般在观测过程中采用分时交替观测航天器及射电源的模式,即:以对天球上位置精确已知的射电源进行干涉测量观测用以获得各项误差的总和,进而内插出航天器观测时刻的系统误差,最终得到消除各项误差后的航天器观测量信息,提高航天器的干涉测量观测精度。图2为差分干涉测量原理图。值得注意的是为了更好地消除传播介质引入的误差一般要求观测射电源与航天器的角距较近。
2 测控网干涉测量在中继星任务中的标校方法
我国的深空网由佳木斯深空站、喀什深空站以及南美深空站组成,3个深空站及纳米比亚站均配备了干涉测量设备,在“鹊桥”任务中利用佳木斯及喀什深空站开展了干涉测量观测。
由于测控网深空站肩负着中继星的测距、测速、遥控、遥测、数传信号接收等任务,为最大限度的保证航天器的安全,测控网干涉测量无法利用常规的短时交替方法观测射电源及航天器以标校系统差。结合实际情况,任务中采用了站外标校即稀疏标校模式,也即在第1个深空站进站前观测强源以标校系统差,在第2个深空站出站之后观测第2个强源标校系统差,中间两深空站共视情况下连续数小时对航天器进行跟踪[8-9]。
上述模式下,由于前后强源标校与航天器的观测时间间隔长,角距大,系统引入了高精度的钟差误差修正、传播介质误差修正用以辅助长时射电源标校模式,主要有下列两种修正模式。
1)测站钟差修正
利用GPS(Global Positioning System)共视法修正测站钟误差,测站连续记录测站钟与GPS时钟的差异,构造钟差随时间的变化模型,在系统中钟差采用线性模型。
2)传播介质误差修正
在传播介质误差修正方面,系统引入了对流层误差修正模型,实时用以对航天器观测量的误差修正。事后模式下,利用测站配备的水汽微波辐射计、全球导航卫星系统(Global Navigation Satellite System,GNSS)双频接收机、气象仪等环境参数采集设备,测量本地对流层、电离层等传播介质误差项。
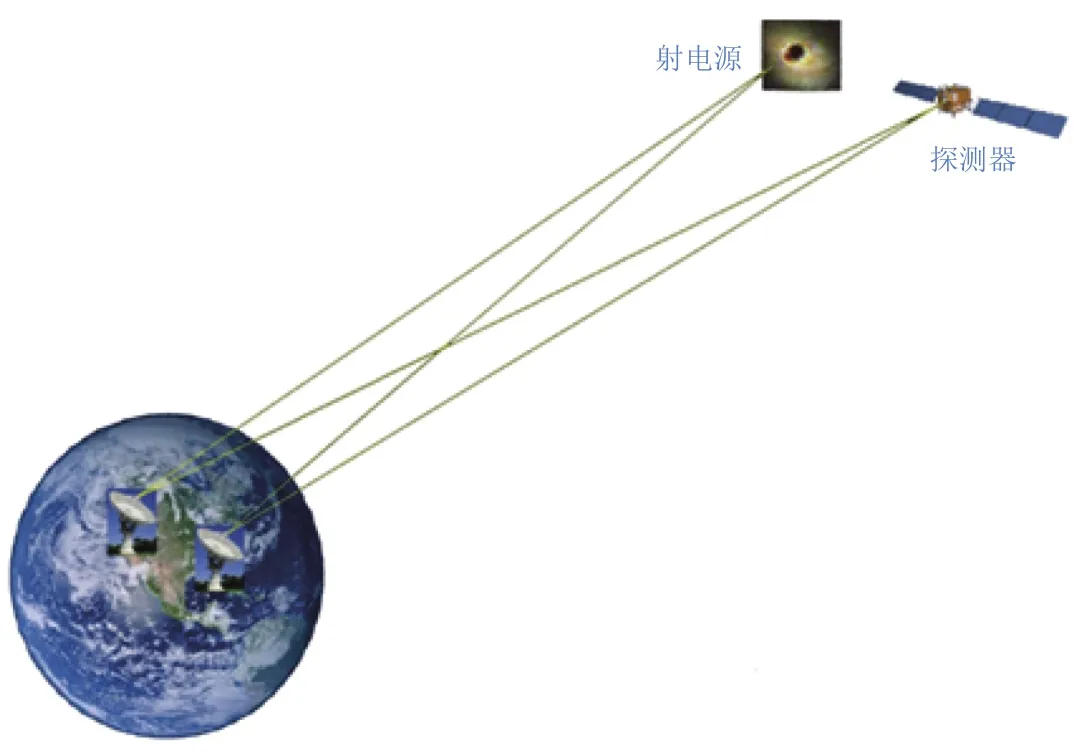
图2 差分干涉测量原理图Fig.2 Principle of Delta-VLBI
3 干涉测量与定轨结果精度分析
“鹊桥”于2018年5月21日5点28分发射升空,在整个飞行期间,星上下行发射S波段干涉单向距离测量(Differential One-way Range,DOR)侧音信号。最大带宽为7.5 MHz,对干涉测量的指标要求为5 ns。中国深空网在地月转移段、月球至L2点转移段进行了多次△DOR(Delta Differential One-Way Range,DOR)测量跟踪。数据采集格式为VLBI标准接口VSI(VLBI stander Interface)格式,采样率为4 MHz,利用2 bit量化模式,通道数为8,覆盖了两个点频的DOR音,增加了应急数传频点。
3.1 钟差建模结果
在任务中对测站的钟差进行了一次项建模作为模型项的一部分,任务中通过测站的本地钟与GPS系统32颗星的时间比对统计完成两测站的钟差建模,处理结果如图3所示。
由图3可以看出,两测站钟差呈现较好的一次项特性,在任务期间没有发生钟跳等现象。一次项建模可以很好地描述测站钟差变化。

图3 佳木斯及喀什深空站5月21日至6月2日钟差Fig.3 Clock Error of Jiamusi and Kashi station between May 21st and Jun 2nd
3.2 环境参数时延校正
任务中,事后模式下,两测站的环境参数采用实测值进行误差项扣除,图4为两站其中一天的环境参数情况。
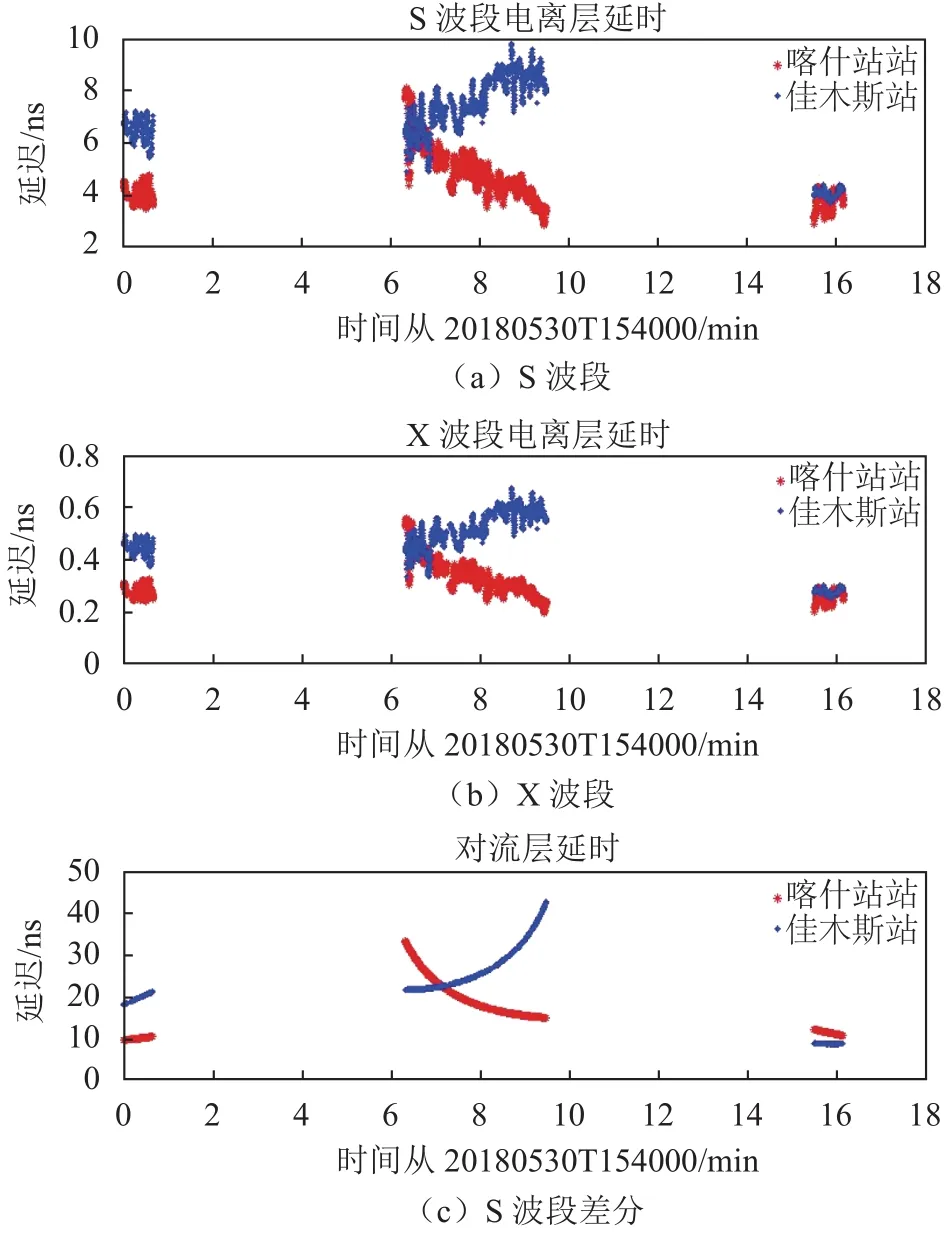
图4 两测站环境参数在任务中的变化情况Fig.4 Variety of environmental parameters for two stations
由图4可以看出,环境参数在射电源观测弧段与航天器观测弧段相比变化较大,同时,电离层高频项明显。
3.3 时延差结果分析
深空干涉测量系统所得干涉测量结果参与了中继星任务的联合定轨。佳木斯-喀什深空站基线与CVN(Chinese VLBI Network)的北京-乌鲁木齐基线在构型上相似,因此下面将利用5月27日的定轨残差数据对两基线进行比对。
图5为两深空站时延残差测量结果图,由图中可以看出,相同的观测弧段下,两条基线的观测精度相当,深空干涉测量系统与标称轨道的偏差在1 ns之内,有相同的变化趋势,但是仍然存在0.4 m的系统差,整个“鹊桥”任务期间的与标称轨道偏差小于3 ns。任务中,CVN采用交替观测模式,深空网采用长时稀疏标校模式,上述结果再次表明测控网稀疏模式标校的有效性,其数据处理结果可以用于中继星任务的联合定轨。
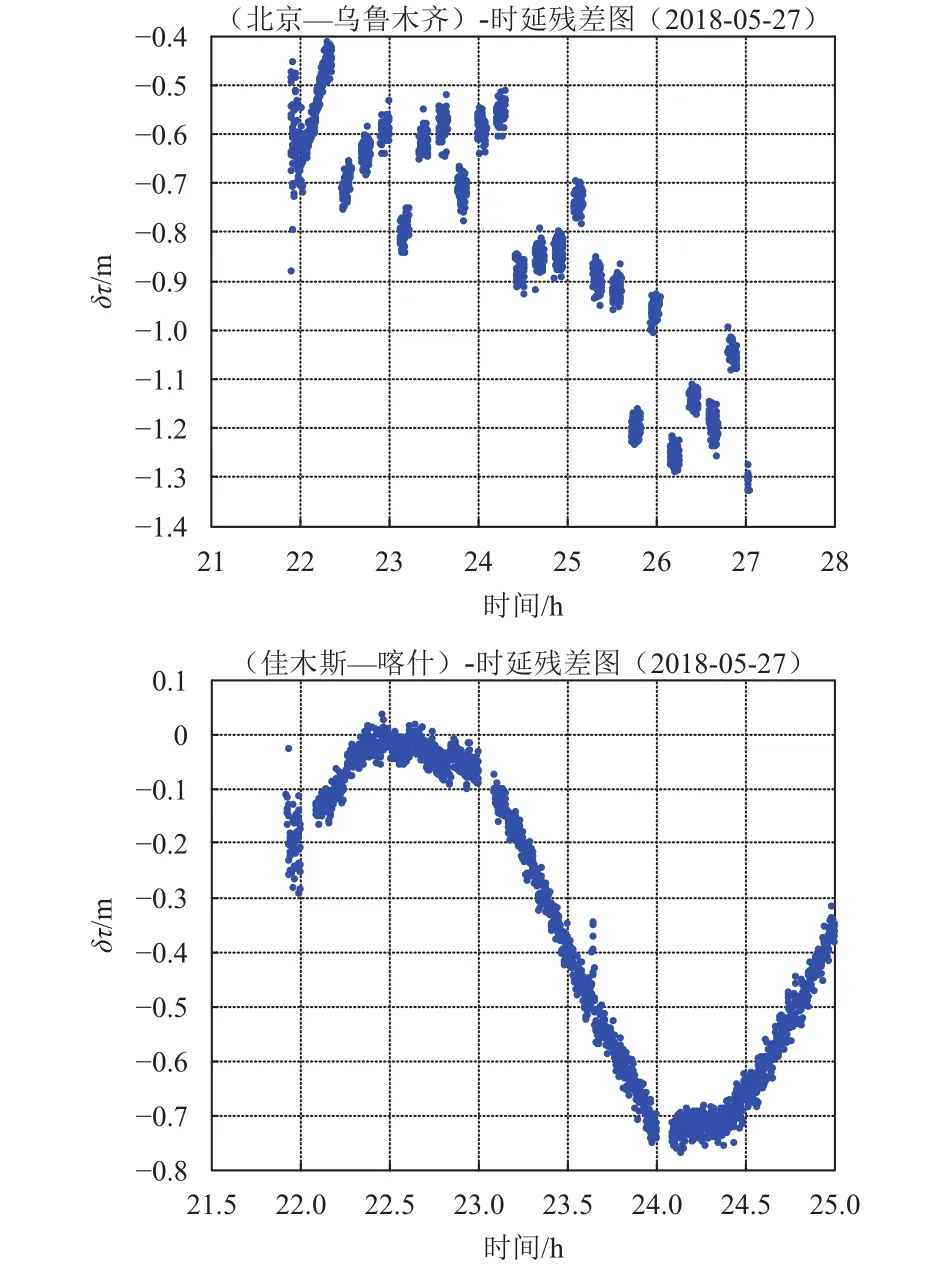
图5 两基线定轨残差结果对比图Fig.5 Comparison of delay-difference for two similar baseline
4 结 论
深空网干涉测量技术已成功应用于“嫦娥3号”任务、再入返回飞行试验任务、此次又成功应用于“鹊桥”中继星任务,标志着我国测控网干涉测量系统已具备开展高精度干涉测量的能力,随着后续南美深空站及纳米比亚站的加入,我国测控网的干涉测量能力将进一步提升,为我国未来的深空探测任务提供进一步支持。