月球中继通信卫星系统发展综述与展望
2018-04-12张立华吴伟仁
张立华,吴伟仁
(1.航天东方红卫星有限公司,北京 100094;2.探月与航天工程中心,北京 100086)
引 言
月球探测一直是深空探测的重点,并且在未来很长一段时间内,月球探测仍将是国际深空探测活动的重点,美国、俄罗斯、欧空局和中国未来都规划了多个月球探测任务,包括无人探测和载人登月任务[1-11]。
以往的月球着陆和取样返回探测任务都集中在月球正面,我国的“嫦娥4号”任务在人类历史上首次着陆于月球背面开展科学探测[12],未来也会有更多的探测器涉足月球背面以及两极区域。月球背面南极有太阳系中最大最深的撞击盆地—“艾托肯”(Aitken)盆地,月球南北极还存在水冰,月球两极和背面可能蕴含丰富的资源,具有更大的探测价值。因此,月球的这些对地不可见区域或将成为未来月球探测关注的焦点。我国后续的月球探测任务,也是把月球极区作为重点探测目标,包括巡视器/机器人探测、宇航员探测和人机联合探测等方式。
在环月探测任务和月球正面的着陆及取样返回探测任务中,探测器在各飞行阶段的测控通信均能够依靠地面站支持,因而没有发展专用中继通信卫星系统的迫切需求。随着月球两极和背面等区域的探测价值凸显,对这些对地不可见区域的中继通信问题受到国内外的高度关注。
因为月球总是一面朝着地球,所以月球的背面一直对地不可见。对于月球两极区域,也不是每天都能对地可见,特别是月球极点附近区域,约半个月时间无法直接对地可见,且对地指向仰角小于6.5°。对于月球的这些对地不可见区域,月面探测器无法与地面站建立直接的通信联系,传统的地球轨道中继卫星系统也无法解决,必须研制专用的中继通信卫星[12-13]。
对于载人探月任务,各个阶段都需要地面站能够与载人飞船和宇航员进行实时的测控通信,由于月球的遮挡,地面测控站以及地球轨道的中继卫星系统都无法对载人月球探测器进行连续无缝隙的实时覆盖,也有对月球中继通信卫星的需求。
1 国内外研究情况综述
月球中继通信的想法和相关的研究论证工作由来已久。早在1950年,阿瑟·克拉克在《行星际飞行》一书中就提出地月L2平动点是向月球背面殖民地进行广播和电视转播的理想位置,这也是月球中继通信的最早想法[14]。
1963年,美国喷气推进实验室(Jet Propulsion Laboratory,JPL)的Kliore在《平动点卫星的利用》一文中,将月球中继通信的想法进一步深化,提出了利用地月系统的平动点来实现对月球背面和极区的中继通信的想法,并与采用环月轨道的中继通信卫星系统进行了比较[15]。
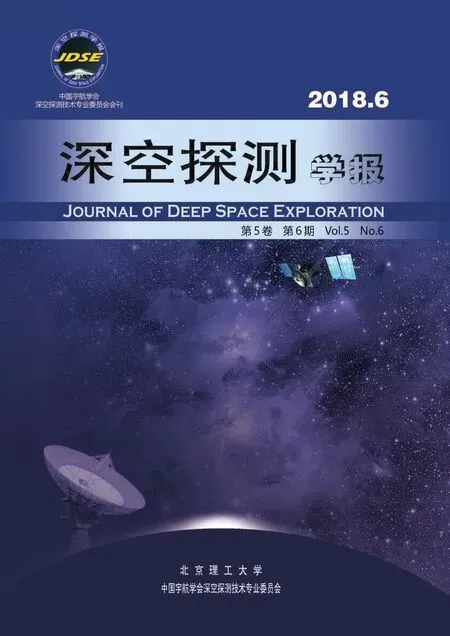
1966年,美国TRW公司的Neuner论证并提出了环月轨道的月球中继卫星系统[16],该系统采用了由多星组成的能覆盖整个月球的星座方案,每颗卫星通过自旋稳定控制姿态,采用单组元的肼推进系统,如图1所示。
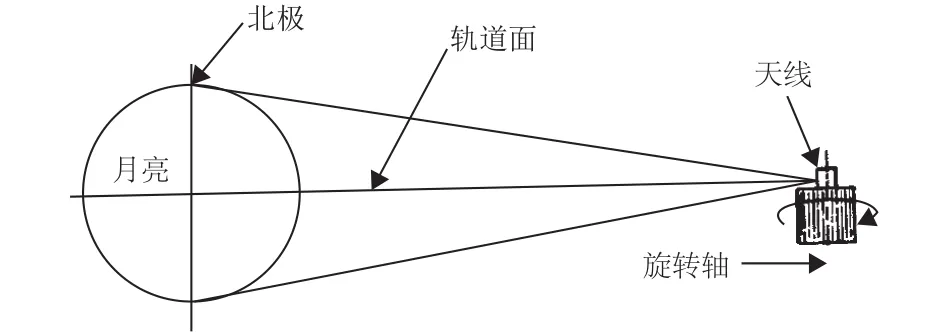
图1 TRW公司的月球中继卫星概念Fig.1 Lunar relay satellite concept by TRW
1967年,美国国家航空航天局(National Aeronautics and Space Administration,NASA)戈达德飞行中心的Vonbun提出了运行在绕地月L2平动点轨道的中继通信卫星方案,构型如图2所示,卫星名为“Hummingbird”,重量190 kg,采用离子电推进系统进行轨道维持[17]。
1967年,美国的Farquhar教授提出了绕地月L2点Halo轨道的概念和在这一轨道上放置一颗中继卫星对月球背面着陆的探测器提供中继通信的方案[18-20],如图3所示。按照Farquhar的建议,NASA曾计划在“Apollo17”任务中实施该想法,由于任务风险较大等原因未能实现。
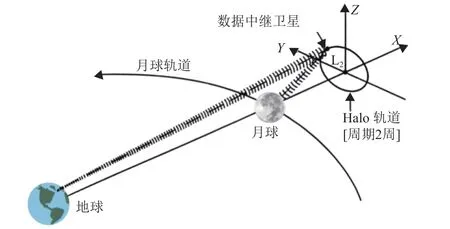
图3 支持月球背面探测任务的地月L2点Halo轨道上中继通信构想Fig.3 Communication between the lunar farside and the relay satellite in Earth-Moon Halo orbit
1970年,美国MIT(Massachusetts Institute of Technology)的Kurland等[21]提出了针对月球背面探测任务的中继卫星方案,如图4所示,卫星运行于振幅大于3 500 km的Halo轨道,期望能够支持阿波罗(Apollo)载人登月任务及月球背面的无人探测任务。
图4 MIT的月球中继通信卫星方案Fig.4 Scheme of lunar relay satellite proposed by MIT
20世纪六七十年代月球中继通信卫星的研究论证工作主要是伴随着月球探测任务的兴起和Apollo登月计划的实施来开展的。在NASA的组织下,美国的相关研究机构、大学和工业部门都对月球中继通信卫星系统开展了大量的研究论证工作,提出了很多月球中继通信系统的解决方案[16-22],掀起了月球中继通信卫星研究的第一轮热潮。由于当时技术能力的限制以及缺乏迫切的需求,研究论证工作还停留在设想和概念阶段,主要集中在轨道和中继通信覆盖特性方面,对卫星本身的方案缺乏深入细致的论证,工程可实现性不强。
从20世纪90年代开始,美国和欧洲曾论证提出了多个针对月球背面和两极的着陆探测任务[4-11],其中中继通信卫星也是论证的重点,提出了相应的解决方案。
美国的休斯公司为拟在月球背面进行的低频射电观测任务提出了中继通信卫星方案[22],该卫星运行于地月L2点Halo轨道上,采用自旋稳定平台,如图5所示。

图5 美国休斯公司的月球中继通信卫星方案Fig.5 Scheme of lunar relay satellite proposed by Hughs company
NASA的Glenn研究中心也开展过月球中继卫星的研究和论证工作,提出了绕月球大椭圆极地冻结轨道运行的COMPASS(Collaborative Modeling and Parametric Assessment of Space Systemes)中继卫星方案,为月球南极探测任务提供中继通信和导航支持[23],如图6所示。
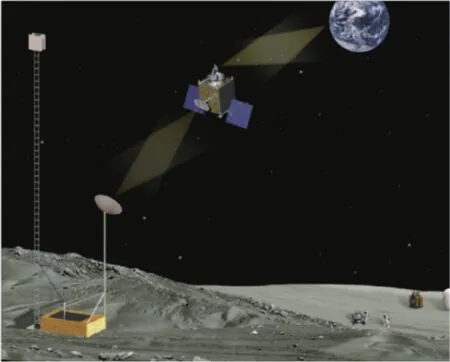
图6 NASA Glenn中心的月球中继通信卫星构想Fig.6 Lunar relay satellite proposed by NASA Glenn research center
美国科罗拉多大学和MicroSat公司针对月球南极探测任务提出的中继通信卫星方案,如图7所示,采用了绕地月L2平动点的Halo轨道,卫星平台采用MicroSat公司的TacSat 2卫星平台,整星重量约400 kg[10]。
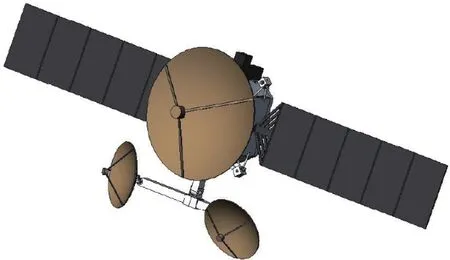
图7 MicroSat公司的月球中继通信卫星构想Fig.7 MicroSat’s lunar relay communication satellite
近年来,欧洲航空航天局(European Space Agency,ESA)论证提出了FARSIDE月球背面着陆探测任务,如图8所示,其中的中继通信卫星也采用了绕地月L2平动点运行的Halo轨道,卫星平台采用Myriad微小卫星平台,整星重量约250 kg[8]。
德国的OHB公司和斯图加特大学在2014年提出了运行于地月L4和L5平动点的月球中继通信卫星方案,如图9所示,目的是为无人和载人月球探测器提供支持,卫星重量约2 020 kg,运行寿命为10年,为了解决大容量数据传输的问题,除了微波中继链路外,还采用了激光通信链路[24]。
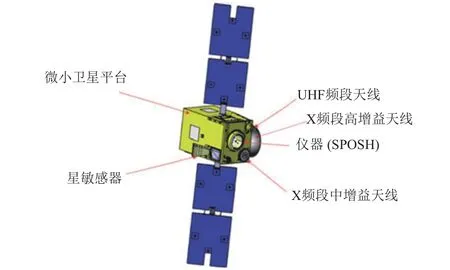
图8 ESA FARSIDE任务的中继通信卫星Fig.8 Relay satellite for ESA FARSIDE mission
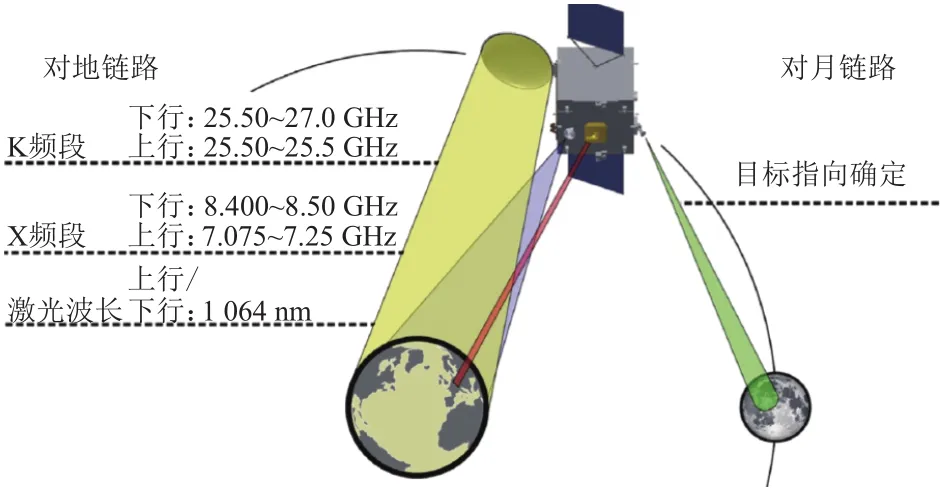
图9 OHB公司月球中继通信卫星构想Fig.9 Lunar relay satellite proposed by OHB
月球中继通信卫星选择地月L2平动点轨道同时还有利于采用LiAISON(Linked,Autonomous,Interplanetary Satellite Orbit Navigation)导航方法实现对月球探测器的导航定位。
约翰·霍普金斯大学(The Johns Hopkins University,JHU)在NASA支持下提出的月球中继通信和导航定位方案采用3颗月球极轨卫星、3颗赤道轨道卫星和1颗地月L2平动点Halo轨道卫星组成的系统。7颗卫星形成对月球的全部覆盖,能够为月球探测器提供中继通信和导航服务,如图10所示。
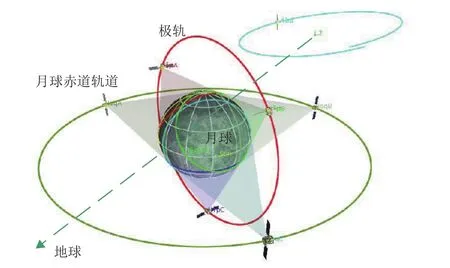
图10 JHU的月球中继通信与导航定位系统构想Fig.10 JHU lunar communication and navigation system concept
NASA的Goddard空间中心提出的中继通信与导航系统方案则采用了地月L2点Halo轨道卫星与GPS(Global Positioning System)系统相结合的方案,能够为地月空间的航天器提供中继通信和导航定位服务。
在20世纪90年代开始的月球中继通信卫星研究新一轮热潮中,除美国外,欧洲也开展了相关的工作,研究论证更加深入,对环月轨道和地月平动点轨道进行了详细的分析比较,大多数方案都选择了平动点轨道。卫星方案都是基于现有的成熟平台,具有较好的工程可实现性。进入21世纪以来,导航定位与中继通信相结合的解决方案备受关注,新的导航方法不断提出。但由于研究论证的项目都没有最终立项,缺乏工程的牵引和带动,研究工作未能取得实质性突破。
除了具体的中继通信卫星方案论证工作外,美国和欧洲在月球中继通信卫星体系架构方面也开展了很多研究工作[25-27],提出了针对各种月球探测任务的全面解决方案,为未来月球中继通信系统的体系化发展奠定了基础。
NASA曾专门成立了一个空间通信体系工作组(Space Communication Architecture Working Group,SCAWG)来制定通信体系架构,针对月球探测任务的中继通信和导航需求,深入论证了从机器人探测到载人月球探测的每一发展阶段的系统解决方案,覆盖了从月球正面、两极到背面的各类探测任务。
ESA对载人登月任务的测控通信体系也进行了深入论证,提出了针对各个任务阶段的系统解决方案,其支持月球背面任务的测控通信系统总体框架如图11所示,其中包含了运行在绕地月L2点轨道上的2颗中继通信卫星。
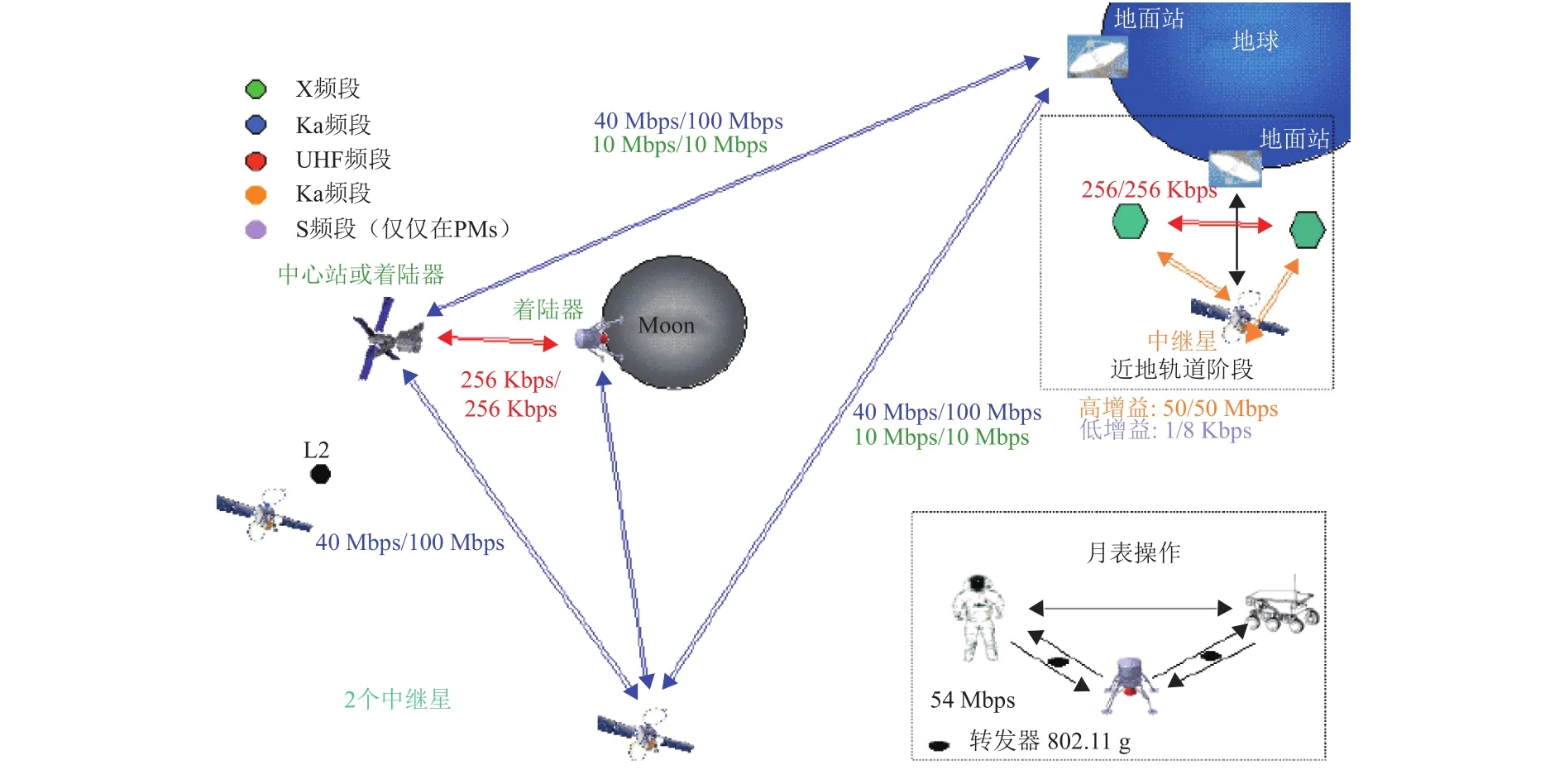
图11 ESA针对月球背面载人登月的测控通信体系Fig.11 Communication system architecture for manned lunar farside missions
近年来,国内针对月球中继通信方面也开展了一些研究和论证工作,包括轨道设计、系统方案研究和发展建议[28-31]等。研究工作主要集中在系统轨道选择和性能分析方面,包括各种轨道卫星及星座的覆盖性能、维持代价、通信性能等方面的分析研究。
尽管月球中继通信卫星系统的研究和论证工作已开展了很多年,提出了很多解决方案,但由于各种原因,一直未能在工程上实现。中国的“嫦娥4号”任务是人类历史上首个在月球背面开展着陆和巡视勘察的探测任务,“嫦娥4号”任务的中继星—“鹊桥”,也是世界上首颗月球中继通信卫星,该卫星已于2018年5月21日发射并进入到绕地月L2平动点运行的Halo轨道,50多年前的设想终于变成了现实。“鹊桥”为2018年12月8日发射的“嫦娥4号”着陆器和巡视器提供中继通信服务,支持完成月球背面的着陆和巡视勘察探测任务,如图12所示。
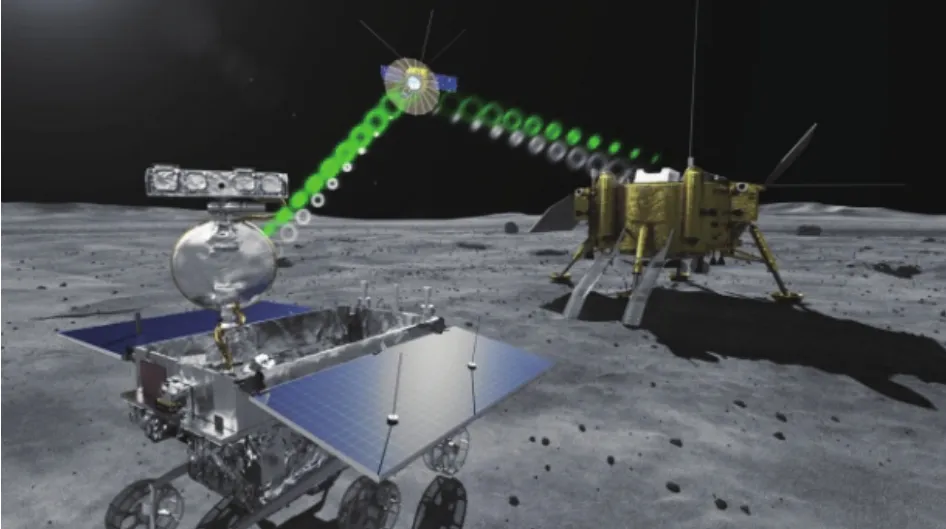
图12 “嫦娥4号”月球背面着陆探测任务Fig.12 Chang’e-4 lunar farside landing exploration mission
2 月球中继通信的能力需求分析
月球中继通信卫星系统重点是解决月球背面和两极等对地不可见探测任务以及载人航天器在绕月过程中的对地不可见时段的对地通信需求,月球中继通信卫星需要提供的任务支持能力主要包括:
1)支持完成对月球探测器的测控任务:实现地面上行遥控指令和注入数据的转发,兼顾无人探测和有人探测的需求,码速率要达到20 Mbits/s。
2)支持对月球探测器的高速数据传输任务:返向接收月球探测器不小于100 Mbits/s码速率的数据,将月球探测器获取的探测记录、科学数据及宇航员的声音、视频等传到中继通信卫星。
3)支持对地高速数据传输任务:要求提供不小于100 Mbits/s码速率的对地数传能力,将月球探测器得到的探测记录、科学数据及宇航员的声音、视频等传回地面站。
4)实时性要求:中继通信转发的时延要小,特别是月面遥操作和与宇航员的语音通信,不考虑信号传输距离带来的时延,中继通信前返向链路的转发时延都要控制在500 ms以下。
对月球中继通信卫星的需求概括起来就是:高覆盖率、高码速率、高可靠性、强实时性。不同的月球探测任务对中继通信的需求不同,因此月球中继通信卫星系统要根据具体的任务特点来选择最合适的解决方案。
NASA把月球中继通信设施纳入了SCaN集成网络中以扩展其对月球附近用户提供服务的能力。SCaN架构中月球中继通信部分如图13所示,包括地月之间的主干链路以及月球表面的链路,能够为月球探测任务,特别是载人登月任务提供保障。
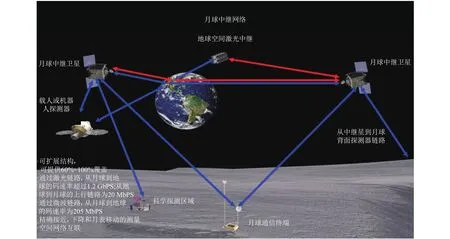
图13 NASA的月球中继通信系统构架Fig.13 Relay communication system architecture for NASA lunar exploration missions
SCaN体系架构中的月球中继通信部分将提供60%~100%覆盖能力,具体取决于用户需求、轨道位置和航天器的数量。月球中继通信系统拟采用激光链路,从月球到地面站数据速率高达1.2 Gbits/s,从月球附近通过射频链路,还能提供不少于250 Mbits/s的数据速率,以及无线电测距能力。
3 中继通信体制选择
不同于地球轨道中继卫星系统,月球中继通信卫星中继通信体制的选择要根据任务的需求和特点来设计,月球中继通信的体制和方案选择重点要考虑以下一些问题。
1)网络协议选择
从目前国际航天任务空间组网协议体系的研究和应用情况来看,可供选择的主要有4种协议体系:基于CCSDS(Consultative Committee for Space Data Systems)的协议体系、基于TCP/IP(Transmission Control Protocol/Internet Protocol)的协议体系、将CCSDS与TCP/IP结合的协议体系、基于DTN(Delay Tolerant Networks)的协议体系。CCSDS协议为国际标准协议,专为空间链路设计,体系比较完善,同时也支持地面TCP/IP协议在空间的拓展,已得到广泛应用。
基于DTN的协议体系针对深空应用环境提出,为更远期的发展而设计,涵盖了前面3种协议体系,是更高一级的协议体系。首先,DTN通过存储转发机制,能够较好地解决长时延和链路不连续导致的问题,适用于地球到月球乃至更远距离的深空通信;其次,DTN能够将不同类型的网络下层协议整合在一起,在不改变原有网络基本结构的基础上实现多重异构网络的互联互通,具有良好的兼容性和扩展性。另外,基于DTN架构,对现有设备的改造主要是在协议层次上,大部分设备无需改动硬件,代价较小,可实现性好。因此,基于DTN的星际互联网络协议体系适合于月球及深空中继通信任务,可作为支持月球探测任务的星际互联网的主要协议架构[32]。
我国下一代地球轨道中继通信卫星系统的网络传输协议也将采用DTN协议[33],因此,月球中继通信卫星采用DTN协议也有利于与其互联互通。
2)中继转发体制选择
中继通信卫星的通信转发主要有透明转发及再生转发两种体制,与单纯完成转发的透明式转发相比,再生转发具有星上处理、交换功能,不会引入转发噪声,能够减少传输差错率,提高效率,消除干扰,降低传输时延,改善中继通信的性能,因此月球中继通信卫星主要是采用再生转发体制。
3)调制方式选择
调制方式的选择是由系统的信道特性决定的,与其它通信系统相比,月球及深空通信任务中的功率受限问题更加突出。为了有效利用功率资源,使调制后信号波形的瞬时幅度波动尽量小,从而减小非线性的影响,使用非线性功率放大器和(准)恒定包络调制所得到的性能增益要高于使用线性功率放大器和非恒定包络调制信号的增益。
目前中继卫星系统的星地和星间微波链路一般采用BPSK(Binary Phase Shift Keying)或QPSK(Quadrature Phase Shift Keying)调制方式,而且调制方式和数据传输速率在中继通信过程中不能改变。对于未来月球中继通信链路,数据速率500 Mbit/s以下的链路仍应与现在一样主用BPSK或QPSK,500 Mbit/s以上的链路可采用8PSK(8 Phase Shift Keying)、16APSK(16 Amplitude Phase Shift Keying)、GMSK(Gaussian Filtered Minimum Shift Keying)的频谱利用率高等调制方式,同时链路调制体制能够根据系统使用情况,通过软件加载手段,随时升级和改进,形成具有认知能力、实时自适应、功能可升级的柔性调制体制。
4)采用高效编码方式
由于月球中继通信距离较远,通信信号衰减大,对这种极为微弱的信号进行处理的难度大。而纠错编码则是一种有效提高功率利用效率的方法,在深空探测器上普遍采用了纠错编码。目前采用的信道编码主要是以卷积码作为内码、RS码(Reed-Solomon Codes)作为外码的级联码,未来将以LDPC(Low Density Parity Check Code)、BCH+LDPC等高增益纠错码为主。
4 中继通信任务的轨道位置选择和覆盖特性
对于月球中继通信卫星,轨道位置的选择十分重要,直接决定了中继通信的覆盖特性和链路能力。
月球中继通信任务主要有两类轨道可以选择:①是环月轨道;②是地月平动点轨道。两类轨道各有特点,需要根据具体的任务来选择合适的轨道。
环月轨道的特点是距离月面近,能够以较小的代价实现高码率的中继通信,但其运动特点决定单颗卫星无法实现对月球背面等不可见区域的连续通信,如果发射多颗卫星组成星座,则会增加系统研制建设成本,还带来了测控管理上的复杂性。而将中继通信卫星放置于地月L2平动点轨道上,借助平动点轨道运动特性,利用单颗卫星就可以实现对月球背面和南极等对地不可见区域的连续通信。
另外,由于平动点特殊的动力学特性,在绕平动点轨道上部署的中继通信卫星仅需消耗很少的推进剂就能实现长期的轨道保持,因此,地月平动点成为布置月球中继通信卫星的理想位置选择。运行在地月L2平动点轨道上的卫星通过采用较大的振幅,能够保证始终对地球和月球背面可见,相对于月球轨道卫星,地月平动点轨道上的卫星有阴影的时间极少,对星上电源供给更有利。因此,在地月平动点轨道上布置中继通信卫星,能够以较少的卫星数量实现对月球探测器的连续覆盖。为支持月球背面的着陆和巡视探测任务,提供连续的中继通信服务,“嫦娥4号”中继星就选择了绕地月L2平动点的Halo轨道[34]。
绕地月L2平动点的轨道是不稳定的,必须定期进行轨道维持[35]。按照目前地月L2平动点Halo轨道的测轨精度和中继星轨道控制精度,经仿真分析,每年轨道维持所需的速度增量不超过36 m/s,根据“嫦娥4号”中继星当前在轨维持的实施结果,每年轨道维持所需的速度增量不超过20 m/s。绕月轨道的中继通信卫星也有轨道维持的问题,最好选择冻结轨道,轨道维持所需的推进剂消耗很小。
5 月球中继通信技术未来发展展望
“嫦娥4号”中继星揭开了月球中继通信卫星系统发展的序幕,但其主要是为满足“嫦娥4号”着陆器和巡视器要求而专门研制的一颗卫星,中继通信能力有限,也不具备灵活的适应性,为了能够对未来的月球探测任务提供有力的保障,月球中继通信系统要在以下一些技术方面进一步发展。
1)提高传输码速率,解决大容量数据传输的问题
未来的月球探测任务会产生大量的科学数据,这些数据需要高速可靠地在航天器之间传递并传回到地球。由于中继通信卫星离月球轨道探测器和月面探测器的距离可能比较远,通过无线电通信链路提高数据传输码速率的代价较大,而激光通信系统则是解决问题的更好途径。近年来,激光通信技术飞速发展并逐渐在地球轨道航天器上得到应用,在2013年9月发射的LADEE(The Lunar Atmosphere and Dust Environment Explorer)月球探测器上,NASA进行了月球激光通信演示(Lunar Laser Communications Demonstration,LLCD)试验,使用激光通信实现了月球和地球之间的远距离数据传输,对地数据传输速率达到622 Mbits/s,为后续在月球探测任务中的应用奠定了技术基础[36-37],因此激光通信是未来月球中继通信链路的一个重要选择。
2)提高覆盖性,实现全月面、全时段的覆盖能力
随着月球探测任务的发展,月球探测器将可能运行在各种环月轨道及各个月面位置,月球中继通信卫星系统必须能覆盖到全月轨道和全月面,与地面测控和应用系统配合,能够对各种月球探测器实现连续不间断的中继通信服务。未来的月球中继通信卫星系统要通过分阶段、分步骤建设,发展由多种轨道卫星组成的星座系统,最终形成全月面、全时段的覆盖能力。
3)统筹考虑,实现体系化发展
月球中继通信卫星系统的发展,不能仅仅考虑月球探测任务的需要,还要兼顾其它深空探测任务的中继通信需求,包括火星、小行星和木星探测等其它深空探测任务。
为了实现科学数据的有效传输和提供可靠的通信导航服务,NASA提出了下一代空间互联网体系结构,以深空中继通信系统为主干线,构成行星际网络,月球中继通信卫星系统的发展也必须统筹兼顾、协调发展、综合利用,放在整个深空通信体系中来考虑。
4)提高系统灵活性和适应性,便于国际和商业用户使用
为了能够服务于国际和商业用户,月球中继通信卫星必须要有开放的架构,灵活的配置,能够适用各类数据接口。
未来月球中继通信卫星系统要通过认知无线电和软件定义无线电等新技术的应用,能够根据使用环境和用户需求实时对包括传输频率、传输速率、信道纠错码等参数进行自适应调整,也可根据新的任务需求对链路参数进行更新配置和加载,使中继通信链路与使用环境和用户需求达到最佳匹配。月球中继通信卫星系统的建设,也必须考虑到国际联网能力、互操作性、通用性的要求,要采用DTN等标准化的网络传输协议,能够为国际和商业用户提供有效的服务。
5)与导航定位统筹考虑,形成综合保障能力
在月球探测任务中,地球轨道的GPS、北斗等导航系统难以对月球探测器提供连续可靠的导航定位服务,因此除了中继通信,导航定位也是月球探测任务的一个重要需求。在针对月球探测的导航定位方面,国内外也开展了大量的研究和论证工作,提出了相应的解决方案,LIAISON导航就是其中一种有前景的导航方式[38-40],该种导航方式具有系统简单、定位精度高的特点,只要参与星间测量的卫星中有一颗卫星位于地月平动点轨道上,依靠星间距离或速度测量信息就能确定各个卫星的绝对位置和速度。
未来月球中继通信系统的发展与导航定位能力的发展要同步进行,以形成综合保障能力,通过平台资源共享、信息共用,有效降低系统研制建设成本,为月球探测任务提供更全面的保障。
6)提高系统使用寿命,增强系统效费比
月球中继通信卫星系统作为月球探测任务的服务保障性系统,必须具有较长的使用寿命,至少应运行10年以上,并且能够为更多的用户提供服务,同时要便于升级和维护,增强系统效费比。
6 结束语
月球仍将是人类未来空间探测任务的重点目标,NASA在2018年9月最新发布的“国家太空探索活动”中提出,2020年开始以月球资源探测为重点的任务,21世纪20年代末,让宇航员重新登陆月球,同时考虑在地月空间建立永久性空间站。俄罗斯近期也提出了21世纪30年代实现载人登月的目标。我国针对南极等区域的无人探测任务正积极推进,载人登月任务也会在不远的将来实施。为支持机器人、宇航员及人机结合的月球探测任务,中继通信是必须解决的关键问题。
发展专用中继通信卫星系统是满足月球探测任务中继通信需求的一种重要途径。为了实现全月球、全时段覆盖,可以采用地月平动点轨道与绕月轨道卫星结合的星座系统,充分发挥两种轨道的优势。要共享平台资源,将中继通信与导航定位能力统筹考虑,形成全面的服务保障能力。中继通信链路要考虑采用激光通信链路,进一步提高中继通信的码速率,满足大容量数据传输要求。
未来的月球中继通信卫星系统要使用软件定义无线电等新技术,能够根据使用环境和用户需求对链路参数进行自适应调整,方便用户使用,并具有较强的多用户和新用户支持能力。月球中继通信卫星系统与用户航天器、地球轨道中继通信卫星系统、地面控制中心间要构成天地一体化数据传输网络[33],并与支持其它深空探测任务的中继通信系统统筹考虑,形成统一的、集成化的网络,为各类深空探测任务提供稳定可靠的中继通信与导航服务。